多种环境下GNSS-RTK监测噪声特性分析
2021-06-19 08:15于丽娜
导航定位学报 2021年3期
陈 刚,于丽娜
(1.中海石油技术检测有限公司,天津 300452;2.天津大学 建筑工程学院,天津 300350)
0 引言
新兴的全球卫星导航系统(global navigation satellite system, GNSS),由于具备自动化程度高,受环境影响小,支持全天候监测,可直接获取三维坐标信息等诸多优势,目前已广泛应用于遥感、测绘、工程结构变形监测等诸多领域。实时动态差分(real time kinematic, RTK)是一种基于载波相位双差模型进行定位的技术,RTK模式下,GNSS监测具有较高的精度[1-3]。随着星座系统的完善和设备采样频率的提升,GNSS-RTK技术能够提供更加安全可靠的监测数据。
然而,由于多路径误差在测站间不具相关性,无法通过差分方式消除,多路径效应成为影响GNSS-RTK监测精度的主要因素。基于多路径误差的周期重复特性,人们尝试构建误差修正模型进行恒星日滤波,对削弱多路径效应具有良好效果[4-6]。但是,在实际的工程监测中,周边环境随时可能发生改变,导致GNSS-RTK监测难以获取精准的误差修正模型。此外,GNSS-RTK监测精度还受仪器内部噪声的干扰。研究表明,仪器内部噪声呈现明显的高斯白噪声特性[7]。文献[8-9]通过经验模态分解(empirical mode decomposition, EMD)算法,获取固有模式函数(intrinsic mode function, IMF),基于白噪声分量的能量密度与其平均周期的乘积为常量这一特性,筛选IMF分量进而实现白噪声与多路径误差分离,这为本次研究提供了参考借鉴。为了提升GNSS-RTK监测精度,需要充分了解其误差特性,并考虑监测环境的影响。为此,本文提出一种改进的噪声分解算法,对GSSS-RTK监测噪声信号进行分解,从而实现多路径误差与仪器内部噪声分离。
本文利用改进的自适应噪声完备集合经验模态分解(complete ensemble empirical mode decomposition with adaptive noise, CEEMDAN)算法联合平均周期图法,对不同环境下GNSS-RTK监测稳定性试验数据进行噪声特性分析。首先介绍了联合算法的基本原理和应用流程;然后应用矩阵实验室(matrix laboratory, MATLAB)软件建立仿真信号, 验证改进CEEMDAN 算法的噪声分离效果;在此基础上,对4种环境(水域,水泥地,草地,变电站)GNSS-RTK稳定性试验数据进行处理和分析,进而评估不同环境下 GNSS-RTK的监测噪声特性。
2 改进 CEEMDAN算法联合平均周期图法基本原理
2.1 CEEMDAN算法基本原理
CEEMDAN算法是对EMD经典算法的最新发展,通过添加自适应白噪声并且计算唯一残余分量,解决了 EMD分解中模态混叠、白噪声污染、附加模态[10-14]等问题,其基本原理如下:
1)对原始信号x(t)添加N次白噪声ε0ωi(t)(i= 1,2,…,N) ,并进行 EMD分解,得到第一组IMF分量,可表示为

式中:E1[·]表示第一次EMD分解得到的IMF分量;ω(t)为正态白噪声;ε0为第一次添加的白噪声幅值系数。
2)对第一组 IMF分量进行平均处理,成为CEEMDAN分解的第一阶IMF分量,即
式中,f1i(t)为第一组IMF分量。
3)第一个残余信号可表示为

4)对r1(t)添加新的白噪声1E1i(t)εω,并继续分解,得到第二阶IMF分量,即

5)以此类推,得到第j个残余信号,即

6)第j+1阶IMF分量可表示为

7)循环步骤4)、步骤5),直到分解完成,得到最终的残余分量,即
式中,J为IMF分量总阶数。
2.2 基于相关系数和有效系数重构IMF分量
在充分考虑 GNSS-RTK监测噪声特性的基础上,提出基于有效系数和相关系数相结合的方法,来筛选含有高斯白噪声的IMF分量。
1)相关系数。相关系数是用以反映两个变量间相关程度的统计指标,可表示为
式中:N为数据长度;u,v代表两个独立变量(信号);分别为变量u,v的平均值,可分别表示为
信号经CEEMDAN分解后,得到一系列按频率由高到低排列的 IMF分量。根据高斯白噪声的随机特性,白噪声主导的 IMF分量与原始不含噪序列的相关程度较低,因而可根据 IMF分量与原始信号的相关系数阈值判定其是否为白噪声主导分量。参考文献[15],阈值可取
式中,C为相关系数。
2)有效系数。将能量密度与平均周期的乘积定义为能量系数,其表达式为

式中:D为能量密度;为平均周期。
能量密度的表达式为

式中:M为信号长度;fl(n)为第l个 IMF分量的幅值。
平均周期的表达式为
式中,Ol为第l个IMF分量的极值点个数。
白噪声主导的IMF分量,其能量系数为常量。根据这一特性,构造有效系数作为判定标准筛选白噪声[16]。有效系数可表示为
当Rl≥1时,说明第l个IMF分量对应的能量系数,较前l-1项 IMF 分量能量系数的平均值成倍增大,表明前l-1项 IMF 分量的能量系数为常量,即白噪声分量。
3)相关系数和有效系数相结合的阈值。考虑到从 GNSS-RTK实测信号无法获取不含噪声的纯净信号,只能选择原始监测信号(包含噪声)与其经CEEMDAN分解得到的IMF分量进行相关系数的计算,因而筛选结果可能存在偏差。此外,有效系数仅适用于筛选高频白噪声分量,无法识别低频噪声分量。鉴于此,本文将相关系数和有效系数相结合,以有效系数判定前几项高频白噪声主导分量,以相关系数判定后几项低频噪声分量。具体方法将在下节仿真信号处理中详述。
2.3 平均周期图法基本原理
为了解 GNSS-RTK监测噪声的时频特性,本文基于平均周期图法对信号进行时频变换,进而获取信号的归一化功率谱密度[17]。功率谱密度函数的表达式为

式中:x(k)为监测信号;FFT [x(k)]为x(k)快速傅里叶变换(fast Fourier transform,FFT)结果。
归一化功率谱密度的表达式为

2 仿真信号验证
为了验证本文所提出的、改进CEEMDAN算法联合平均周期图法的有效性,本节通过仿真信号进行验证。利用MATLAB软件,生成一组频率为0.2 Hz的正弦函数信号,其表达式为

再对正弦信号叠加正态高斯白噪声ynoise,构成叠加信号

对信号按照0.1 s间隔进行采样,采样时长为100 s,共计1 000个采样点。正弦信号、噪声信号和叠加信号如图1(a)至图1(c)所示。
运用改进CEEMDAN算法对叠加信号进行分解,并计算了相应的有效系数(R)、IMF分量与正弦信号的相关系数(C1)和 IMF分量与叠加信号的相关系数(C2),结果如表1所示。根据公式(9)计算相关系数阈值,分别为δC1=0.0959和δC2=0.0833 。可以看出,根据IMF分量与叠加分量的相关系数(C2),难以有效筛分白噪声分量;而根据有效系数,可以有效地筛分白噪声分量,其结果与C1判定结果一致,但无法判定低频噪声分量。接下来,基于相关系数和有效系数的单一方法阈值和组合方法阈值筛选 IMF分量,并计算了重构IMF分量与原始正弦函数的相关系数:
1)基于有效系数重构IMF4至IMF9,相关系数为0.972 8;
2)基于相关系数(C2)重构IMF 1至IMF6,相关系数为0.828 3;
3)基于有效系数和相关系数重构 IMF4至IMF6,相关系数为0.975 7。
可以得出,基于相关系数和有效系数相结合阈值的 IMF筛选方法,能够取得最佳效果。此外,根据IMF4至IMF6重构的去噪信号如图1(d)所示,与原始正弦信号(图3(a))呈现了极大的相似性。
3 GNSS-RTK稳定性试验及噪声特性分析
3.1 试验介绍
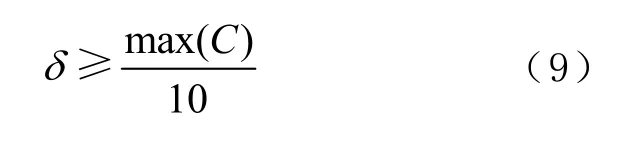
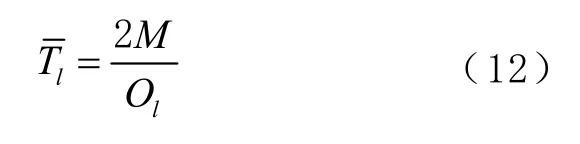
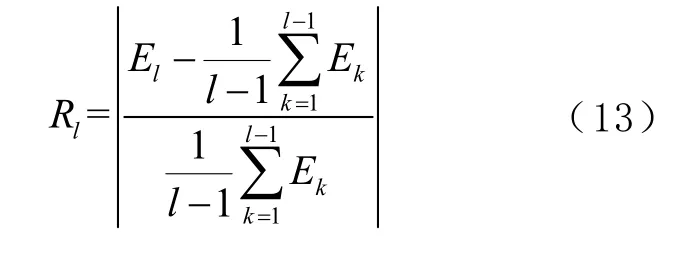
为了分析环境对 GNSS-RTK监测的影响,进行了不同环境下 GNSS-RTK监测稳定性试验。本次试验选用中海达公司生产的海星达 H32型GNSS-RTK接收机,试验地点位于天津市滨海新区郊外。选择水泥地、亲水平台、草地和变电站等几种环境安置流动站;基准站安置在开阔的水泥地环境下,尽量避免遮挡和强反射造成的多路径效应。接收机采样频率为10 Hz,持续采样3 h。实测信号经过海星达差分软件处理后,电离层误差、对流层误差等与空间相关的误差被大大削弱,残差影响可忽略不计,误差主要来自仪器内部白噪声和不同环境下的多路径效应。首先,对监测点信号进行坐标转换处理;继而,去除平均值,获取GNSS-RTK相对位移时间序列。
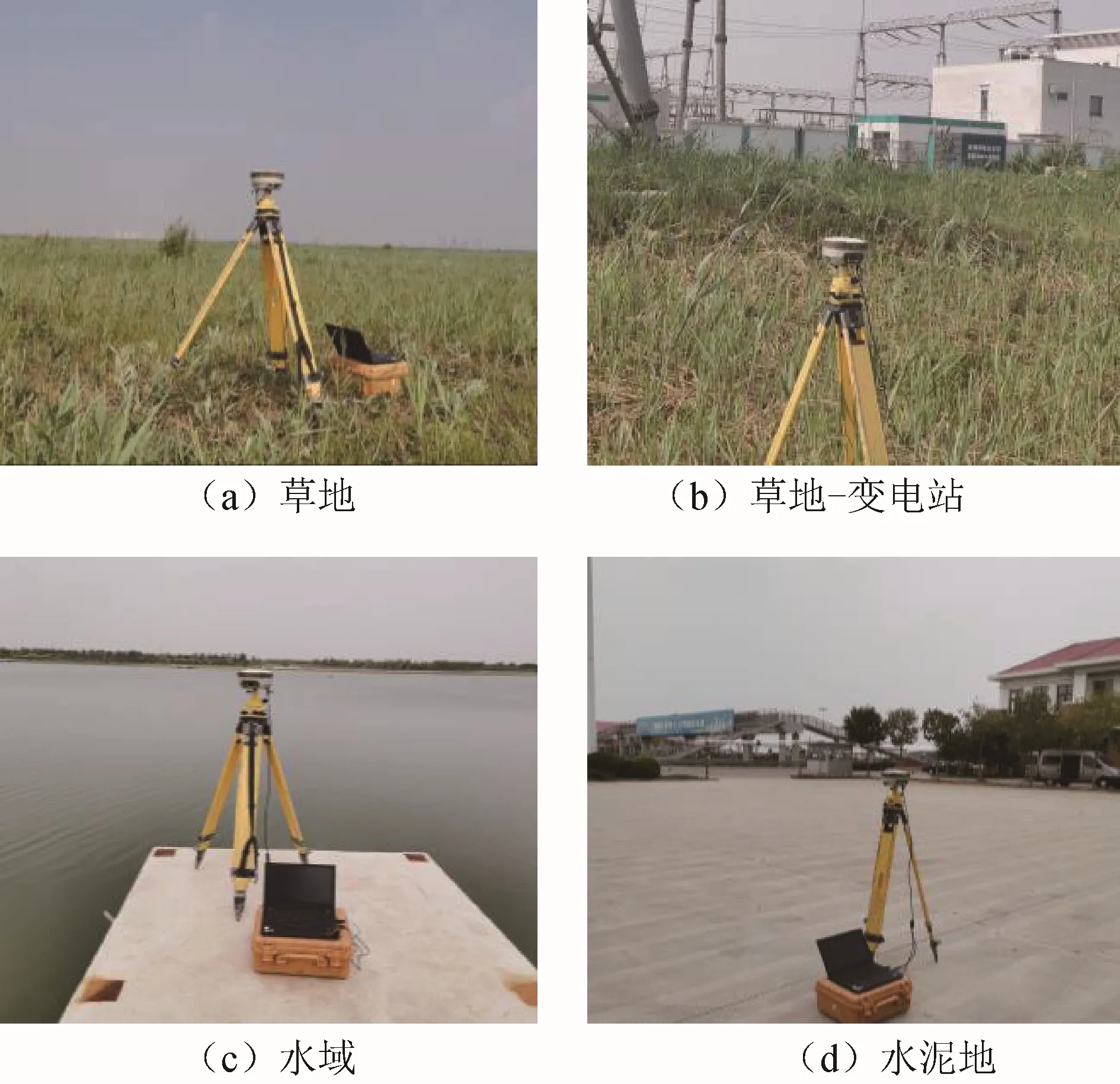
图2 GNSS-RTK稳定性试验环境
3.1 数据处理与分析
为了便于计算和展示,截取高程方向时长为1 000 s的序列进行计算。经过改进CEEMDAN分解,得到4种监测环境下的白噪声序列和多路径误差时程序列,并基于平均周期图法计算了 4种环境下多路径误差序列的归一化功率谱密度函数,结果如图3至图6所示。
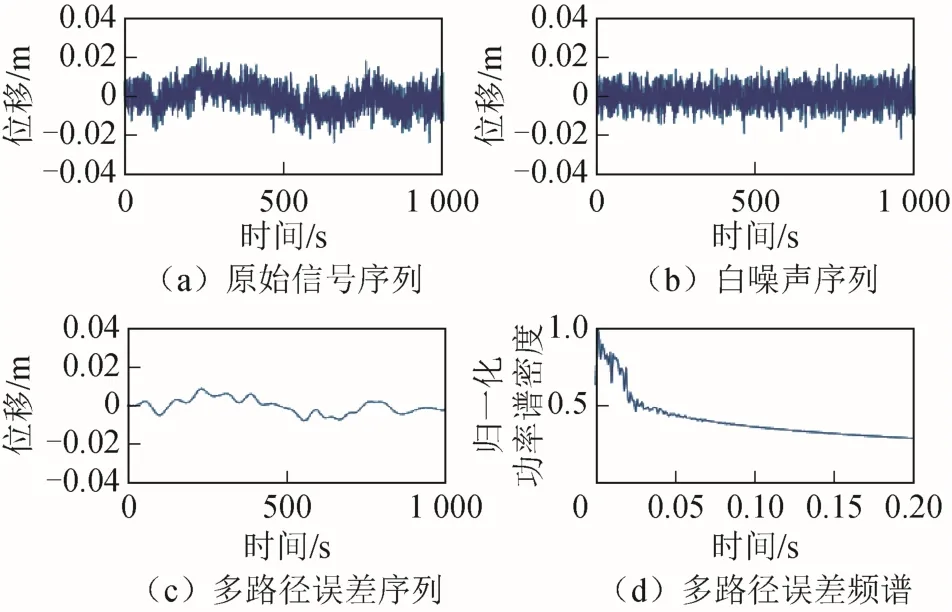
图3 在水泥地环境下,高程方向监测信号时频序列

图4 在水域环境下,高程方向监测信号时频序列
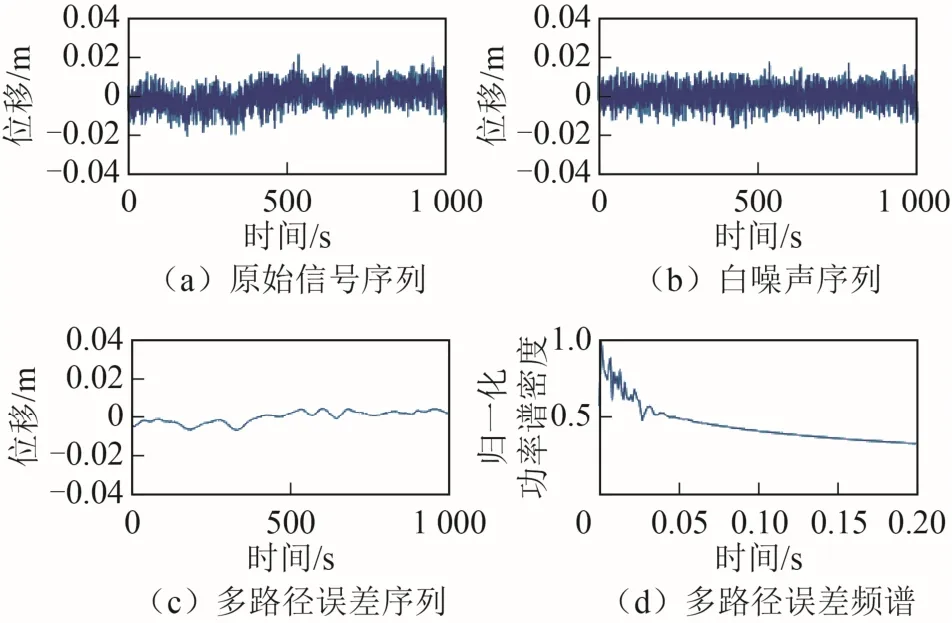
图5 在草地环境下,高程方向监测信号时频序列

图6 在变电站环境下,高程方向监测信号时频序列
除变电站环境外,在水泥地、草地和水域3种环境下,监测信号的位移幅值主要分布在± 0.02 m范围内,监测精度与仪器本身标定精度一致,证明了 GNSS-RTK监测的可靠性。然而,在变电站环境下,监测信号的位移出现较大波动,幅值分布在± 0.04 m范围内。这是由于在变电站环境下,监测信号受到草地、高压电、高压线塔等多重环境因素的干扰,导致监测噪声较大。通过归一化功率谱密度-频率曲线可知,水泥地、草地和水域3种环境下多路径误差主要分布在0.05 Hz范围内,在变电站环境下,多路径误差频谱主要分布在 0.1 Hz范围内。总的来说,多路径误差的频域分布较小,在实际的结构工程监测中,可通过高通滤波器予以滤除。此外,为了避免监测信号淹没在噪声中,采用H32型GNSS-RTK接收机进行监测时,结构的动态变形位移幅值应保证大于0.02 m。
4 结束语
本文研究了环境对 GNSS-RTK监测精度的影响,在4种环境(水泥地,水域,草地,高压电)下,进行了 GNSS-RTK稳定性试验,提出利用改进CEEMDAN算法联合平均周期图法对监测噪声进行分析,得出如下结论:
1)通过采用MATLAB构造仿真信号,证实了改进CEEMDAN算法能够有效提取白噪声。基于相关系数和有效系数相结合的阈值方法,能够筛分IMF分量,其精度高于应用单一方法。
2)通过对4种环境下的实测信号进行时频分析得出:在一般环境下,GNSS-RTK监测位移幅值在± 0.02 m范围内,其精度与仪器标定精度一致,证明了GNSS-RTK监测的可靠性;然而,在草地、高压电、高压线塔等多重因素干扰下,GNSS-RTK监测噪声较大。此外,多路径误差的频域分布较小,主要分布在0.05 Hz范围内,因而可通过高通滤波器予以滤除。
猜你喜欢
中国现代医生(2022年6期)2022-04-23
中国药学药品知识仓库(2022年5期)2022-04-11
初中生世界·九年级(2021年11期)2021-12-28
舰船科学技术(2021年12期)2021-03-29
读者·校园版(2020年19期)2020-09-16
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
劳动保护(2019年3期)2019-05-16
英美文学研究论丛(2018年1期)2018-08-16
饮食科学(2016年7期)2016-07-27