
Weber能量法求裂纹齿轮轴的啮合刚度
2021-06-27 08:01冯今昭
机械设计与制造 2021年6期
冯今昭,高 鹏,刘 畅
(辽宁石油化工大学机械工程学院,辽宁 抚顺 113001)
1 引言
在齿轮啮合的一系列研究中,行星轮系的研究占有很大比重。行星轮系的主要分析方法为有限元法与集中质量法两种,前者在于建立实体模型后使用有限元软件进行分析;后者则需要预先计算出刚度参数、质量参数、阻尼参数等,本课题研究的内容主要服务于其中刚度参数计算。目前利用集中质量法分析的对象多数都是完整齿轮,它们刚度计算可以用《GB/T 3480-1997》国家标准、石川法、Weber能量法以及一些原有方法上延伸出的简便算法进行计算[1],如文献[2]基于有限元法对渐开线直齿内齿轮的轮齿刚度进行了简化计算;文献[3]以相似理论为基础,提出了轮齿刚度计算的简化公式等。
而对于具有裂纹、磨损等典型缺陷的齿轮研究依然是以有限元法为主,集中质量法方面应用较少的原因之一就是裂纹轮齿的刚度计算问题。现有的裂纹齿轮刚度计算主要通过齿型简化等效来实现,例如文献[4]采用传统的悬臂梁简化,将裂纹处等效成矩形的凹陷以计算轮齿刚度,文献[5]对整个行星轮系进行简化后利用能量法对啮合刚度进行了计算,此外基于将轮齿简化为梯形与矩形相拼接的石川法也可以用来计算裂纹轮齿刚度。与缺陷齿轮研究相配合,也有不少在各种条件下进行的仿真分析[6]。但是以上轮齿简化的方法都会带来一定程度上的误差,而Weber能量法计算的特点,可以避免将轮齿简化,直接对裂纹齿轮刚度求解,因此本文利用该种方法计算轮齿啮合刚度,并且为了扩大本方法的适用范围,选用一体齿轮轴作为研究对象,同时考虑齿轮轴变形与齿根裂纹对啮合刚度的影响。
2 轴的有限元分析
在很多研究中往往将轴上的齿轮部分视作集中质量圆盘,作为Jeffcott转子模型进行分析,但在减速器等处齿轮厚度与轴的长度的比值往往较大,上述方法会产生较大误差,因此本文将一体齿轮轴作为研究对象,将齿轮轴分成轴与齿两部分,如图1所示。去掉轮齿后的部分视作变直径轴,对其进行有限元分析,求出转动过程中轴上各点的位移与轴的变形情况,将其结果与轮齿的Weber能量法分析相结合,计算得到齿轮轴在齿根裂纹情况下的齿面刚度。

图1 齿轮轴分解示意图Fig.1 Schematic Diagram of Gear Shaft Decomposition
首先如图2所示将齿轮轴划分为6段,7个节点,由于转轴为空间杆件系统,每个轴单元的运动方程为:

其中,


图2 齿轮轴节点划分Fig.2 Gear Shaft Node Division
Fe用下式来表示某一时刻每个节点的受力情况:

式中:ke—空间单元的刚度矩阵;N—作用于i、j两节点的轴向力;Q—y、z方向的剪力;Mx—扭矩;MY与MZ—绕两轴的弯矩;I—对y与z轴的主惯性距;Φy与Φz—对y与z轴方向的剪切影响系数;Jk—对x轴的扭转惯性矩;Ay,Az—梁截面沿y和z轴方向的有效抗剪面积。

一般情况下空间单元具有6个自由度,但对两端刚性支承的转轴进行分析时,轴向力和y、z轴的弯矩为0,因此将上式做如下简化:


同理,对于空间轴单元的质量矩阵也做如上简化,其结果为:

3 啮合齿轮的刚度计算
计算单对轮齿啮合的时变刚度,具体做法是将轮齿视作非均匀悬臂梁,如图3所示。沿参与啮合的齿廓将轮齿分为一系列矩形微元i,在啮合齿廓上任意点j处承受载荷Wj,在Wj作用下各微元均发生一定形变。齿体各微元形变的累加变形qbj、应力接触面处局部变形qcj、齿根处基体的变形qfj三者相加作为j点处沿Wj方向的形变qj;假设一对啮合齿轮接触面的总变形分别为qj1与qj2,则啮合点j处的啮合刚度KJ=Wj/(qj1+qj2)。
3.1 齿根裂纹情况下的齿体形变
首先,裂纹引起的不规则轮齿,如图4所示。假设裂纹发生在齿根圆与基圆之间的G点,裂纹深度g与x′轴方向成θ°角,载荷作用于j点。此时由于齿根已经开裂,G点至j点间的齿面不受张力影响,将裂纹尖端与j点连线,与G点一同构成的阴影区域处于不受外加载荷影响的状态。则可将轮齿视作阴影部分缺失的不规则轮齿,计算其啮合刚度。

图4 裂纹引起的不规则轮齿Fig.4 Irregular Gear Teeth Caused by Cracks
对于图3中完整轮齿的刚度,文献[7]在前人公式的基础上对用Weber能量法求解的过程进行了详细推导,设qbij为单个微元在Wj影响下的变形量,则有:

式中:Ee—根据齿宽确定的有效弹性模量;βj—Wj与y′轴夹角;Sij—i与j在x′轴方向上的距离;Yj—j点处半个齿厚值;Li,Ai—微元的宽度与横截面积;ν—泊松比。
而对不完整轮齿进行微元划分计算时,上式中Ii与Ai会发生变化,为求得变化后的参数,需要作出裂纹产生的直线方程与齿廓方程,如图5所示。
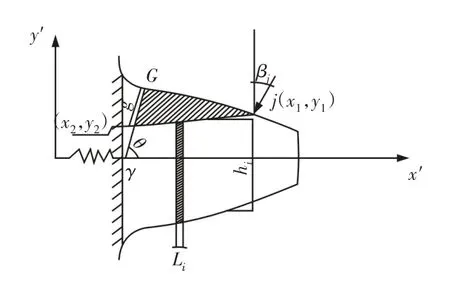
图5 缺陷轮齿微元划分Fig.5 Microelement Division of Defective Gear Tooth
3.1.1 直线方程
假设裂纹起点在齿根圆与基圆之间,rf、rb分别为齿根圆与基圆半径,s′为起点处齿厚,则t时刻裂纹尖端坐标为:

式 中:s′=r′/r·s+2r′·( inv(α)-inv(α′)),cosα′=—分度圆与G点所在圆上的压力角、齿厚、半径。
设t时刻载荷作用点j的坐标为(x1,y1),则裂纹导致产生的直线L的方程为:

3.1.2 齿廓参数方程
渐开线齿廓的参数方程为:

此方程是建立在图6左的x-y坐标系下,需要将坐标转换到与上图同样的x′-y′坐标系下进行计算。

图6 坐标系转换Fig.6 Coordinate Transformation
利用图6右所示某点在两坐标系上坐标的联系:

可得出旋转后坐标系下的渐开线方程:

式中:β—x-y坐标系到x′-y′坐标系的转角,即单个轮齿对应
圆心角的一半;γ=arctan(y/x)
假设在t时刻,微元i上下两端的直线与齿廓的y轴坐标分别为yi″和yi′,且yi″-yi′=hi,则有:

将受到裂纹影响后的各参数带入(8)式中可得到裂纹轮齿的齿体形变。
3.2 齿根裂纹情况下的接触面形变
文献[8]对齿轮传动啮合点处的接触变形进行探讨,得出了适用范围较广且计算相对简便的局部接触变形公式:

式中:Wj—啮合点处法向载荷,E12e=2E1eE2e/(E1e+E2e)
3.3 齿根裂纹情况下的基体形变
根据文献[9]的计算推导,可得出基体形变的计算公式:首先依据齿宽B与节点处齿厚Hp的比值来确定种类,B/Hp>5为宽齿,B/Hp<5为窄齿。窄齿与宽齿的基体形变依次为:

其中,Lf=xj-xM-yjtan(βj);Hf=2yM
3.4 刚度计算
将上述计算结果相加即可得出啮合轮齿的总变形量:

即得出最终的轮齿变形量:q12=q12′+q12′′
4 实例计算
一对啮合齿轮,传递功率4kW,n1=247r/min,m=4,z1=73,z2=25,b1=78,b2=84,小齿轮为45钢调制处理,大齿轮为ZG310-570正火处理。裂纹产生于主动轮齿根处,裂纹深度5mm,裂纹倾斜角10°,求单齿啮合时的啮合刚度。
首先利用静力学求出各节点初始位移y0:

再利用Matlab进行有限元编程,得出轴段各节点随齿轮轴转动产生位移的情况。由于转动起始瞬间齿轮轴呈大幅无规则振动,因此采用后面平稳运行时的数据进行计算,并将其结果用式进行加工,以加入轮齿的总变形量。
由式(7)、式(15)、式(17)分别计算出轮齿各分部分形变,并与相加,得出轮齿的总变形量。一对啮合齿面的变形量,如图7所示。最后利用式(19)计算出轮齿的啮合刚度,如图8所示。裂纹齿轮刚度与去掉裂纹因素的完整齿轮刚度比较,如图9所示。可以看出刚度变化趋势大体一致,但是受裂纹影响整体刚度下降,并且刚度最大处有所偏移。

图7 啮合齿面形变Fig.7 Deformation Stiffness of Meshing Tooth Surface

图8 裂纹轮齿的啮合刚度Fig.8 Mesh Stiffness of Cracked Teeth

图9 单齿啮合时的刚度比较Fig.9 Stiffness Comparison of Single Tooth Meshing
5 结论
以weber能量法为基础计算了齿根裂纹条件下的相关问题,而由于部分传动机构使用的是一体齿轮轴而不是轴键连接的齿轮,因此同时又将计算啮合齿轮扩展到计算啮合齿轮轴,为这一部分机构的刚度计算提供新的思路。刚度计算手段的增加,意味着可以更加充分的利用集中质量法对齿轮问题分析求解,避免了仿真模拟中网格划分、接触面设定困难,以及计算耗时等缺点。
综上,所用方法裂纹因素加入到weber能量法的原公式中,省掉了齿型等效简化的过程,可以直接对轮齿进行计算,没有增加计算负担,且计算结果无过大误差。鉴于集中质量法在机械部件的设计与研究中应用的广泛性,对它的适用范围与算法的扩充就显得尤为重要。因此本文使用的裂纹齿轮刚度计算方法可作为一种新的刚度计算手段服务于裂纹齿轮的集中质量法研究。
猜你喜欢
北京信息科技大学学报(自然科学版)(2022年6期)2023-01-12
化工设计(2022年2期)2023-01-04
工具技术(2022年8期)2022-10-13
装备制造技术(2020年1期)2020-12-25
重型机械(2020年3期)2020-08-24
航空维修与工程(2020年3期)2020-04-10
机电工程(2020年1期)2020-03-04
重型机械(2019年3期)2019-08-27
制造技术与机床(2017年11期)2017-12-18
制造技术与机床(2017年3期)2017-06-23
