拖缆和阻尼器对船舶靠泊运动控制的研究
2021-07-01 19:25耿新雷
中国水运 2021年5期
耿新雷


摘 要:在近港口区域内的船舶自动靠泊技术是当前的研究热点。本文提出了一种新的船舶靠泊技术,即使用阻尼器和绞车组成靠泊系统来解决复杂和危险的靠泊作业。在所提出的靠泊系统中,设计了控制器来抵消波浪和其他因素的影响,以保证靠泊过程的安全。通过实验验证了所提出的船舶靠泊方法和所设计的控制系统在不可预知的外力作用下的有效性。实验结果表明,在设计的控制器的有效控制下,船舶能够及时接近预定位置。本文自动靠泊方法可以为船舶的自动靠泊技术研究提供参考。
关键词:船舶;港口;靠泊系统;阻尼器
中图分类号:U675.9 文献标识码:A 文章编号:1006—7973(2021)05-0120-02
1引言
船舶靠泊被广泛认为是船舶控制和自动化领域最复杂的过程。船舶在靠泊过程中,由于受到风、气流干扰以及浅水、岸壁效应的影响,会产生复杂的动力学行为,难以精确操控,需要通过人的经验来完成靠泊过程[1]。因此,从理论和实践上研究自动靠泊技术具有重要的意义。张强等[2]使用ANN算法对船舶的自动靠泊控制进行仿真试验。在船舶低速运动控制领域,龚征华等[3]基于喷水推进操舵控制系统的工作原理,设计干扰观测器和全局滑模控制器。
因此,本文提出了一种在保证作业安全的情况下船舶靠泊的新方法,并通过实验验证了该方法的可行性。
2系统描述和建模
2.1系统描述
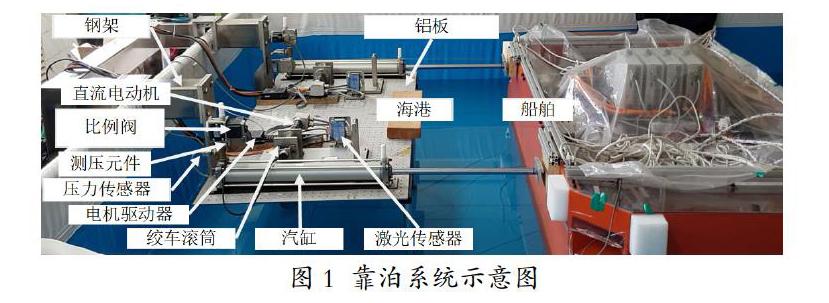
图1为试验布置图,试验采用的靠泊系统主要由激光传感器、绞盘系统、电机、压力传感器、比例阀、测压元件等组成。采用一个船模进行了靠泊试验,在港口一侧安装了两对电机和气缸。通过考虑最终的停泊条件,对所提出的思想和系统配置进行初始化。靠泊最复杂的区域(或距离)大约为从船到码头边10m以内,因为在这一区域,靠泊过程通常需要拖船和引航员来协助才能保证安全。因此,本文提出的靠泊方法,除了安装在陆地上的阻尼器和绞盘系统之外,不需要任何附加的辅助系统。
两对绞盘和阻尼器用于控制船舶运动。开始靠泊工作,首先连接阻尼器的端部,同时将绞车绳索连接到船只上。通过控制致动器产生的拉力和推力,实现靠泊过程。这意味着,通过适当和有效地控制绞车和阻尼器系统,可以实现理想的控制性能和安全靠泊工作。
2.2系统建模
在实验装置准备的基础上,进行系统辨识过程,分析船舶靠泊系统的动态特性。
首先,为了获得绞盘系统的传递函数,向绞盘系统施加10V电力(如图2(a)所示),使得获得如图2(b)所示的绳索拉力。可以看出,拉力的试验值和计算值符合良好。
绞盘系统的传递函数表示输入功率V和钢丝绳拉力T之间的关系,如式(1),可以使用推荐的系统配置提供多种停泊技术和方法。在推荐的靠泊系统中,两个阻尼器和两个绞盘通过合理科学的控制以实现给定的目标。
(1)
3试验
3.1试验仪器
为了评价所设计的控制系统的有效性,在水池中进行了实验,使用船舶模型的重215kg、长2m、宽1m。
船只运动由数据采集系统PCI-6229(NI)利用LabVIEW软件进行测量和控制。从船只到港口的距离由安装在甲板上的激光传感器测量,绳索拉力由测压元件测量,气缸压力由压力传感器测量。
3.2控制器设计
为了保持理想的钢丝绳拉力,设计了一种基于滑模控制的控制器。特别是在滑模控制器的设计中引入了超扭曲算法。设计的反馈控制系统的结构如图3所示。滑动面的典型形式如下:
(2)
其中e是跟踪误差,并且
。
3.3试验结果
本研究的目的是保持绳索的目标拉力,同时将船只移动到所需位置。试验场景如图4所示。
在该研究中,目标拉力设定为120N,如图5(b)中的红色虚线所示。在图5(a)中示出了移动到最终位置期间的容器位置。当船只接近目标位置(0.57m)时,外部扰动多次影响船只;在3s、7s和11s,该船主要受到向港口一侧推力的影响;相反,在14s和18s,拉力影响船只。通过控制两个致动器,船只可以在14s内接近最终位置。绳索拉力和绞车控制信号分别如图5(b)和图5(c)所示;图5(d)显示了整个靠泊过程中阻尼器的压力变化。如实验结果所示,我们可以发现,不管干扰的受力如何,船只都被很好地控制,并且按照预期移动到最终位置。
4结论
为了克服原始靠泊方式的缺点,提出了一种将阻尼器和绞车相结合的新的靠泊技术,实验结果证明了该靠泊方法的良好性能和适用性,可以为船舶的自动靠泊技术研究提供参考。相信随着自动靠泊控制理论、仿真和海试研究的不断深入,自动靠泊控制的研究目标将得以实现。
参考文献:
[1]徐承军,黄庆林,吴建曲.船舶离靠泊辅助系统的发展与展望[J].港口装卸,2020(05):50-55.
[2]張强,张显库,林南均.船舶自动靠泊简捷非线性神经网络控制器[J].中国航海,2017,40(04):11-15+29.
[3]龚征华,田震,熊文,李俊舟,李刚强,袁景淇.全局滑模控制方法在喷水推进操舵系统中的应用[J].上海交通大学学报,2017,51(06):693-697.
猜你喜欢
青年文学家(2022年2期)2022-03-17
振动工程学报(2021年5期)2021-12-16
考试与评价·七年级版(2021年3期)2021-08-14
科学与财富(2021年35期)2021-05-10
信息技术时代·上旬刊(2020年1期)2020-09-10
当代工人(2019年20期)2019-12-13
振动工程学报(2019年5期)2019-11-27
智富时代(2019年3期)2019-04-30
智富时代(2019年3期)2019-04-30
数学大王·趣味逻辑(2019年2期)2019-01-23