地铁列车测速探究
2021-07-02 12:15胡玉山
科学与财富 2021年8期
胡玉山
摘 要:苏州轨道交通1、2、5号线采用西门子信号系统,2、4号线采用卡斯柯信号系统,其车载测速单元有所不同,西门子系统列车测速通过测速电机和雷达共同进行,卡斯柯系统列车测速通过编码里程计进行。本文通过两个系统列车测速方式特点分析比较,为现场维护提供参考。
关键词:地铁;列车测速;分析比较
1引言
列车测速,就是测量列车在轨道上运行实时速度,目的是速度防护和列车定位。速度防护是通过车载测速设备将实际速度输送给车载子系统,并与紧制速度曲线对照,一旦列车实际速度超过紧制速度,列车产生信号紧制;列车定位依靠车载测速设备和布置在轨道中央的固定点式应答器(信标)组合得出,车载测速设备计算列车走行距离,应答器(信标)提供报文位置数据,经过一定的算法得出列车在线路上的定位,并通车、地无线控制单元,实时连续地将列车位置报至中央控制器,进而得到移动授权,实现列车在线路上安全运行。
2测速单元基本情况
2.1西门子车载测速单元
由测速电机(OPG)和雷达测速装置组成的,列车结合两路输入通过一定的计算方法得出最终速度、定位。
2.1.1测速电机
OPG 安装在车轮上,其根据车轮周长和车轮旋转圈数,计算出列车走行距离,进而算出速度。原理是车轮转动时,车辆传输板带动OPG舌片转动,OPG内部通过把车轮旋转圈数转换成脉冲数来计算距离速度,并发送给车载控制单元OBCU。由于车轮空转打滑和磨耗,位移计算值会有误差,列车经过地面固定应答器,车底应答器天线与地面应答器“刷卡”獲取其识别编号ID报文(每个固定应答位置在轨道数据库中有定义),进而次获得定位精准数据。如果误差值超过一定的安全允许值,或经过连续两个固定应答器未获得报文,则列车定位失败,严重的需切除ATP运行。
2.1.2测速雷达
多普勒雷达是一种直接测量速度和距离的设备。列车上的多普勒雷达始终向轨面发射电磁波,由于列车和轨面之间有相对运动,根据多普勒频移效应原理,在发射波和反射波之间产生频移,通过测量频移计算出列车的运行速度,进一步计算出列车走行距离。其克服了车轮磨损、空转或滑行等造成的误差,可以连续测速、测向和定位。
OPG和雷达共同将数据输入车载OBCU,实现列车定位、测速和列车停稳检测等功能。列车低速运行时OPG测速较准确,高速运行时雷达测速较准确。
2.2卡斯柯测速单元
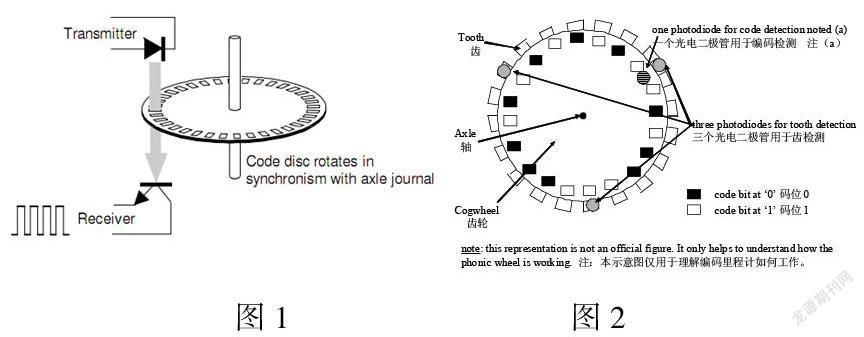
编码里程计由多个传感器组成,其连接到车轴。原理是编码盘与车轴同步转动,发射二极管发出的连续光束被编码盘遮断,接收晶体管探测到脉冲光束,并产生一个与编码盘转速相应比例的频率,频率经放大器元件传输给外部评估系统(见图1)。3个传感器(C1,C2,C3)完成速度测量和确定走行方向,1个传感器(C4)完成编码任务,C1、C2和C3所数到的齿数用以计算车轮的转动,C4进行编码检测(见图2)。通过比较所有这些测量方式的一致性,ATP可以安全地计算列车的速度。
卡斯柯系统的位移测量与车轮直径也相关,而轮径通过测量列车通过两个信标之间的已知距离时所转动的轮周数来自动进行,编码里程计通过MTIB(移动列车初始化信标)来校核轮径,每天当列车从车辆段场进入正线时,车载控制器CC都将校准它的编码里程计。
列车定位也需辅以信标来实现,当CC通过信标时,车底信标天线“刷卡”捕获该地面固定信标识别号和位置参数。而列车实际位置总是根据信标位置加上编码里程计测出的位移组合得出。由于车轮空转打滑效应,位移测量会产生误差。CC在每个重新定位点之间根据通过的上一个定位信标的位置,周期性地估算自己的安全位置、计算列车最大和最小可能位置。该原理保证列车的实际位置总是在ATP最大定位报告和ATP最小定位报告之间。
列车停车时,CC通过检测编码里程计的最小转动角来检查零速信息,当主驾激活端编码里程计检测到零速信息时,与另一端冗余的编码里程计及车辆提供的零速度信息进行比较。若都一致,则CC认为列车已停稳。若都不一致,则检测出机械故障。
3两系统测速设备比较
3.1设备组成与测速精度
3.1.1西门子测速系统由OPG与雷达两个测速单元共同工作,通过车载子系统高效算法得出最终速度值,测速精度小而精,非常准确。
3.1.2卡斯柯测速系统仅有编码里程计一种测速方式,其最小显示精度为1Km/h,最小位移测量值为3m,测速精度一般。
3.2故障情况
3.2.1西门子测速单元
a.OPG故障主要来源于列车长期运行,OPG舌片与车辆传输板之间机械连接处因晃动导致连接舌片的弹簧连接器断裂,OPG无法正常工作,导致列车计算紧制速度不准,列车无法正常运行,需切ATP运行。
b.西门子雷达故障主要集中在设备偶发性不工作导致列车ATO对标不准。当雷达长时间不工作,则会导致位置不确定性累计扩大而失去定位,导致列车紧制、降级。
c.OPG与雷达故障均为硬件故障。
3.2.2卡斯柯测速单元
a.编码里程计故障主要来源于锁轴,原因为司机持续1km/h运行导致编码里程计探测不到列车移动速度,CC系统将结合冗余端编码里程计速度和车辆速度,判断编码里程计被切除,此时车载显示器DMI会产生CC显黄或CC显红,对应为暂时性锁轴、永久性锁轴,这时一般重启CC即可恢复。因此,司机驾驶速度要保持超过1Km/h,否则就会产生锁轴故障。
b.编码里程计故障,大多为卡斯柯系统本身的设计原理,非硬件故障。
4日常维护分析
4.1西门子测速系统,由于轮径磨耗问题和车载系统非实时检测轮径,所以需要定期检查修正轮径值和雷达校准,根据车辆专业提供轮径值数据,登陆现场可更换单元LRU网页修改轮径值;利用雷达校准软件从车载ATP系统读取雷达和OPG测速数据,以OPG速度为基准得出k值(雷达因子),并将雷达因子保存在车载系统中;当车辆镟轮后,必须进行雷达校准,以此来保障测速准确性。OPG设备由于存在弹簧连接器断裂的可能性,则需要定期对其进行拆卸检查维护,费时费工。
4.2卡斯柯测速系统,因车载系统实时检测轮径,则无需定检;即使车辆进行镟轮后,也无需进行校正,列车只需经过转换轨的两个轮径校准信标,车载CC系统就能自动进行校准。维护较为方便。
5总结
从资金投入角度来看,卡斯柯车载测速设备低于西门子;从维护角度来看,卡斯柯比西门子简便;从司机驾驶角度来看,卡斯柯比西门子测速精度低,对司机驾驶要求高;从目前苏州地铁5条线的车载测速设备故障率来看,卡斯柯比西门子故障率低。各地铁公司可根据实际需要选择使用。同时,作为地铁检修人员,应不断探索深度维修技术,提高设备运行稳定率。
6参考文献
[1]苏州轨道交通1号线西门子信号系统技术规格书
[2]苏州轨道交通3号线卡斯柯信号系统技术规格书
猜你喜欢
导航定位学报(2022年5期)2022-10-13
中国惯性技术学报(2019年1期)2019-05-21
传感器与微系统(2018年7期)2018-08-29
铁道通信信号(2018年3期)2018-04-19
导航定位与授时(2016年6期)2016-03-16
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
水道港口(2015年1期)2015-02-06
电视技术(2012年12期)2012-06-26