
一种基于深度神经网络的起航算法
2021-07-03 03:52杜建晖
现代计算机 2021年12期
杜建晖
(四川大学视觉合成图形图像技术重点学科实验室,成都610065)
0 引言
起航是指探测系统在还没有进入可靠的跟踪维持之前所进行的一系列航迹确立过程。经典的航迹起始方法按数据处理方式不同可以分为2 大类:顺序处理和批处理[1]。其中顺序处理中有直观法和逻辑法[2]。批处理技术的主要算法有:Hough 变换法和修正Hough变换法[3],顺序处理方法是根据所设计的规则或逻辑,判断按批次顺序的量测组合是否为真实目标,其实质是一个分类问题。传统的方法都需要根据经验来设置决策门限值,用于判断量测值是否来自原目标。门限值的设定往往影响着整个航迹起始过程的效果[4]。可是这类门限有其自身的局限性:对环境的认知不佳。而本文提出的方法是根据低空监视雷达历史数据作为训练集来进行拟合以便构建分类方法和门限,避免了人工设置门限值的人为误差,而且适应性强,对于不同的雷达,模型可自适应进行分类。
1 主要方法及流程
1.1 流程描述
在本文中,先采用逻辑法对一次雷达数据进行预处理,初步减少杂波对样本的干扰。然后提取速度、加速度和夹角作为初始航迹的特征送入深度神经网络DNN 模型进行训练。算法流程如图1 所示。
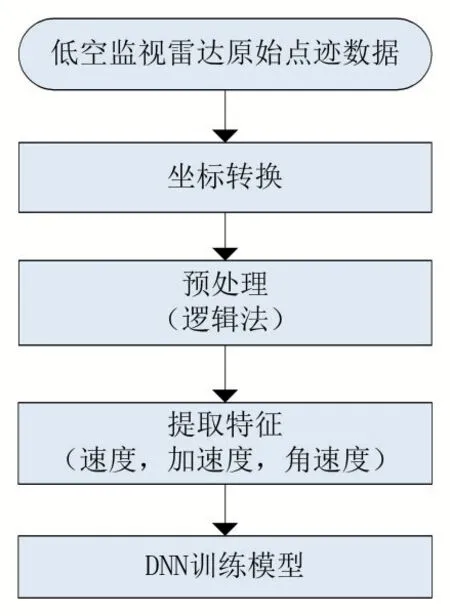
图1 基于深度神经网络航迹起始算法流程
1.2 神经网络
1.2.1 DNN 神经网络
从单层感知机发展到多层感知机,在神经网络中随着网络层数的可增加性,神经网络可以学习到更加复杂的非线性的模型。深度神经网络(DNN)一般是指模型中有大于一个隐藏层。DNN 模型主要有以下几个特点:第一,在权重的初始值设定上,纯BP 算法采用的是随机值,而DNN 权值的初始值与之相比更加接近权值空间中的收敛值。第二,随着引入隐藏层,不仅增加了模型的复杂度,同时也增强了模型的表达能力;第三,输出层的神经元数量可以选择复数,适用于本文中的分类任务;第四,在激励函数使用中,本文的分类任务特征采用的是ReLU 激励函数,并在最后一层采用Softmax 函数进行预测分类,并在预测时添加了Adam优化器进行优化。
本文基于工程上的起航问题,并将其转换为二分类问题:即雷达量测数据的点迹能否用于航迹起始。以从低空监视雷达收集到的大量的量测数据作为数据集,利用DNN 网络模型对其进行训练,得到对雷达量测数据中可用于建航的选取能力,以此来进一步提升航迹起始算法的准确率,增强起航算法在低空雷达杂波较多的环境下的适应能力。
此算法适用的场景为:雷达起航中顺序技术量测数据预处理后,一种对暂态航迹的确认状态。也就是说对暂态航迹获取其特征值,建立模型,作为DNN 输入的向量值,经过多层网络层的模型迭代处理,以分类的方式输出暂态航迹为真实起航与预警起航。本算法的特点是目标运动模型的建立不需人工的干预,算法有较小的复杂度,对量测数据的处理损失值较少。
1.2.2 DNN 分类器的分析
DNN 网络的特点是参数比较多,节点数也多,其缺点是容易出现过拟合现象,我们采取增大训练集的样本量级的方式来避免此现象对算法精度的影响。
其中参数如下:batch_size = 64, learning_rate =0.001,迭代次数为100000,Input_dim=12,hidden1_dim=15,hidden2_dim=12,outpur_dim=1,threshold_value=0.8,dropout=0.1。
1.2.3 特征提取
本文所选取的样本为一次雷达数据经过逻辑法预处理后的量测组合数据,提取其中相邻两个扫描周期点迹之间的平均速度(Vxk1,Vxk2,…,VxkN-11)(Vyk1,Vyk2,…,VykN-1),连续三个扫描周期点迹的加速度(axk1,axk2,…,axkN-2)(ayk1,ayk2,…,aykN-2),连续三个扫描周期点迹的两端连线的夹角(φk1,φk2,…,φkN-2)。
2 实验结果及分析
2.1 深度神经网络模型训练结果分析
2.1.1 数据集的大小
DNN 深度神经网络因为需要先经过逻辑法进行预处理,四个扫描周期内的连续四个点迹数据合并为一条数据进行处理,总的训练集数量7560 条。
2.1.2 训练集的损失值和精度变化
训练集的交叉熵和精确度的变化曲线如图2 所示,其中波浪线代表精确度的变化曲线,实线代表代表损失值的变化曲线。可以看出,当迭代步数为500 步时,损失值由高到低最后趋于稳定,精确度由低到高最后趋于稳定。

图2 训练集的损失值和精确度的变化
2.2 真实数据对比实验
前文已指出,在杂波较多的雷达数据背景下的航迹起始处理问题中,使用最多的经典航迹起始方法是修正的Hough 变换法。检测滤波和虚警率是经常被用于评价航迹起始方法的指标。本文选取一段一次雷达数据经处理后作为测试数据,分别采用修正的Hough变换法和已训练完成的DNN 分类模型进行建航,通过比较两种方法的检测概率和虚警率来评价两种方法的性能。
2.2.1 测试数据准备展示
本文使用的低空监视雷达扫描周期为5s,每次间隔100s 提取4 个扫描周期的数据为一组数据,一共提取60 组数据作为测试数据。共包括点迹数据6840 个点迹数据,形成1280 条航迹,真实航迹数量为152 条。
由于原始数据量较多,本文节选994 个点迹数据(15 条真实航迹)进行过程展示。量测数据的原始分布和真实航迹目标运动轨迹如图3 所示。
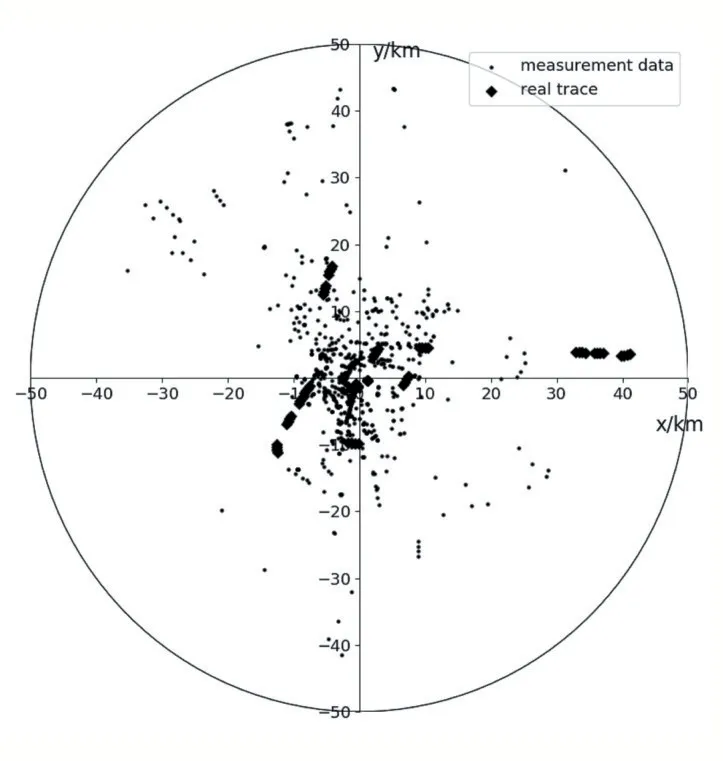
图3 量测数据的原始分布和真实航迹运动轨迹
2.2.2 部分测试数据预处理展示
本文使用的低空监视雷达的距离观测标准差是15m,范围角观测标准差是0.2°。
当采用修正的Hough 变换进行航迹起始时,设定其中的阈值为γ=8。
当采用本文中采用的深度神经网络进行航迹起始前,先采用逻辑法进行预处理,参数设定为Vx_min =0m/s,Vx_max=90m/s,Vy_min=0m/s,Vy_max=90m/s,ax_max= 6m/s2,φ_max=100°,生成航迹集合共计117条,如图4 所示。

图4 预处理后结果
2.2.3 部分测试数据实验结果展示
(1)使用修正的Hough 变换法的航迹结果如图5

图5 修正Hough变换下航迹起始结果
(2)使用基于深度神经网络模型的航迹结果如图6
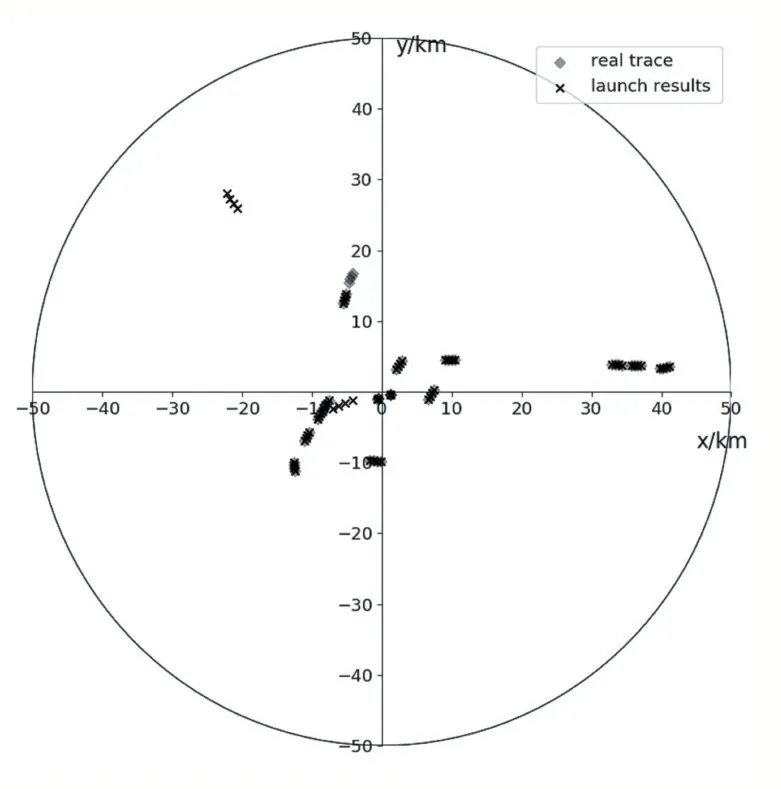
图6 基于深度神经网络DNN模型航迹起始结果
2.2.4 整体测试数据实验结果分析
分别使用修正的Hough 变换和基于深度神经网络DNN 模型检测概率和虚警率结果如表1 所示。
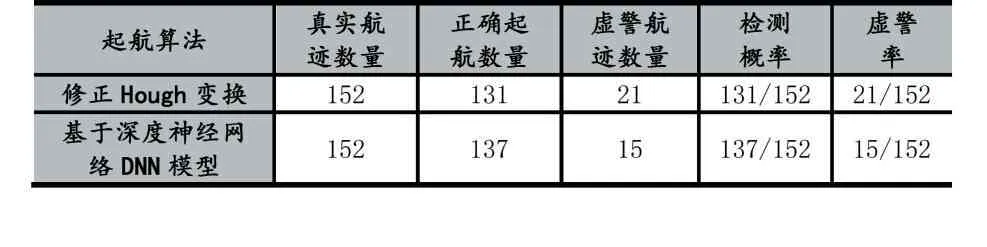
表1 基于两种航迹起始算法的检测概率和虚警率
从修正的Hough 变换和基于深度神经网络这两种方法的实验结果来看,DNN 深度神经网络相对来说具有比较好的结果,在相同杂波环境下,DNN 神经网络航迹起始检测概率高于修正的Hough 变换的同时,其虚警率也明显低于修正的Hough 变换。使用DNN 深度神经网络进行起航是有可行性的,并且起航性能比修正的Hough 变换法要更准确。
3 结语
在低空监视雷达高噪声环境下使用传统航迹起始方法生成的起始航迹检测准确率较低,虚警过多,造成后期航迹跟踪运算量大且易产生跟踪误差。针对这一问题,本文采用了一种基于深度神经网络DNN 的航迹起始算法。实验表明,该方法与传统的修正Hough 变换法相比,检测概率优于修正Hough 变换,且虚警率也小于后者,整体性能较后者有一定的优势。在实际应用场景中,有一定的使用价值。
猜你喜欢
航空学报(2022年9期)2022-10-14
舰船科学技术(2022年11期)2022-07-15
农业工程学报(2022年6期)2022-06-27
舰船科学技术(2022年10期)2022-06-17
健康体检与管理(2022年4期)2022-05-13
化工进展(2022年3期)2022-04-12
现代计算机(2021年5期)2021-04-01
建材发展导向(2021年23期)2021-03-08
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
旅游纵览(2015年8期)2015-09-25
