
玫瑰采摘机器人的设计与实验
2021-07-08 14:19吴汶奇周建平
南方农机 2021年12期
吴汶奇,游 越,周建平
(1.新疆大学机械工程学院,新疆 乌鲁木齐 830047;2.新疆大学电气工程学院,新疆 乌鲁木齐 830047)
0 引言
随着生活水平提高,人们对玫瑰精油、玫瑰化妆品、玫瑰纯露、玫瑰保健品等高端产品需求日益增大。目前,国内加工的玫瑰主要依靠人力采摘,采摘花朵分类不精细,无法达到高端产品质量要求,国内精加工方面的技术基本上是一片空白,高端产品主要依赖进口。
玫瑰精加工对花朵的要求严格,采摘时需依据花朵的颜色和尺寸等指标进行选择性的采摘。目前,市场上还没有完善的、可以量化生产并且可以采摘多种果蔬的机器人[1]。国内对于采摘机器人的研究更是远远落后于发达国家,对采摘机器人的要求极为迫切[2]。因此,设计一款自动化程度高、成本低、效率高的选择性玫瑰采摘机器人势在必行[3]。
1 系统整体设计
该机器人由行走系统、执行机构、控制系统、导航寻迹系统和AI 自动识别系统组成,玫瑰采摘机器人整体图如图1所示。
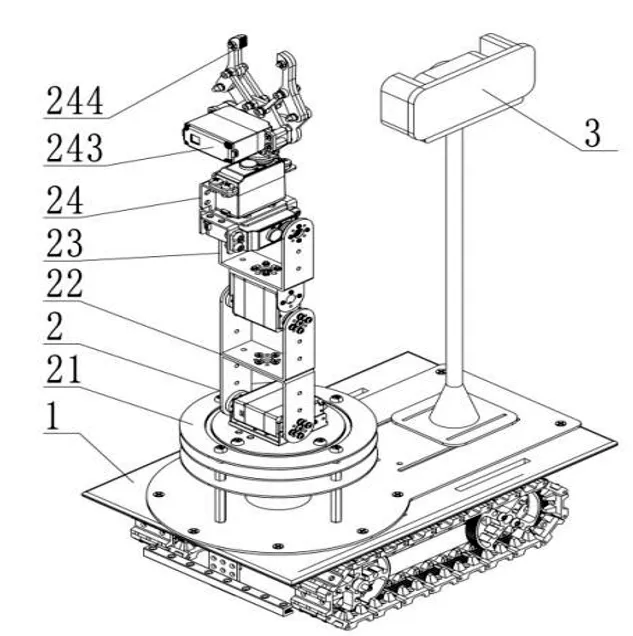
图1 玫瑰采摘机器人整体图
1.1 行走系统
机器人的行走系统采用履带式底盘,四周装配红外避障雷达,采用13.5 kg扭矩霍尔电机为机器人行走提供动力。该电机为直流电机,转速5 r/min~1 000 r/min,且支持电压为12 V~24 V,根据路况和负载情况自动选取不同的输入电压,为机器人提供稳定的动力。该电机上有6个引脚,提供给客户进行自行改编扩展。电机结构如图2所示。同时霍尔电机保存了编码输入功能,在保证机器人可以向任何方向、任何角度进行移动的前提下,为后期扩展留下了空间。
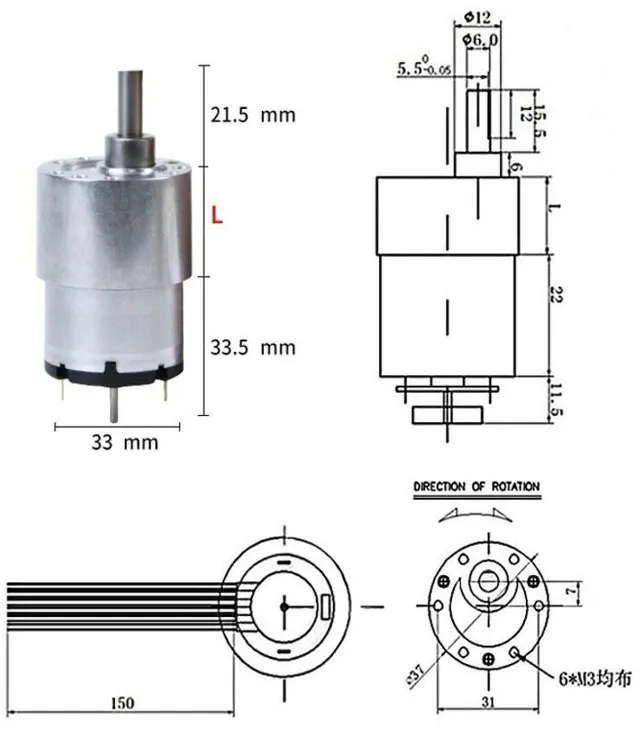
图2 电机结构图
其6 个引脚功能为A1、A2、A3 控制电机的状态,其逻辑功能如表1 所示。PA 为 PWM 波输入(电机速度调节);G为接地引脚;12 V为 500 mA的控电压输出,电机采用AB双相增量式磁性霍尔编码电机,它能够减少整体电阻,可与控制板直连。直流电机的转动惯量相对较小,容易减速或刹车,能够提高采摘机器人运动灵敏性,改善其使用条件下的安全性,当导航出现故障时,可根据其AB 的输出方波,计算距离,从而实现标准位置停车[4]。
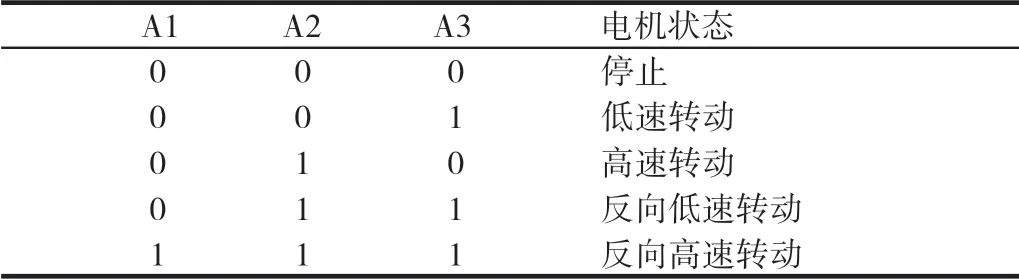
表1 A1、A2、A3 引脚逻辑功能表
通过Matlab 对电机进行模拟,作出拟合曲线如图3 所示,可根据实际载荷设计合适驱动速度。

图3 拟合曲线
1.2 执行机构
执行机构机器人的爪又称为末端执行装置,是机器人直接用于采摘操作的部件。图4具有模仿人手动作的功能,安装于机器人手臂的前端。由于本装置是对玫瑰花进行夹取,因此,笔者设计的是夹钳式取料手,该执行装置由一个舵机、一对齿轮、一对夹取爪组成,其中夹取爪最前端装有一对刀片,在夹取时将玫瑰的茎切断,防止采摘花朵时对玫瑰植株造成损伤。根据控制系统发出的指令完成玫瑰花朵的采摘。电路如图5所示。
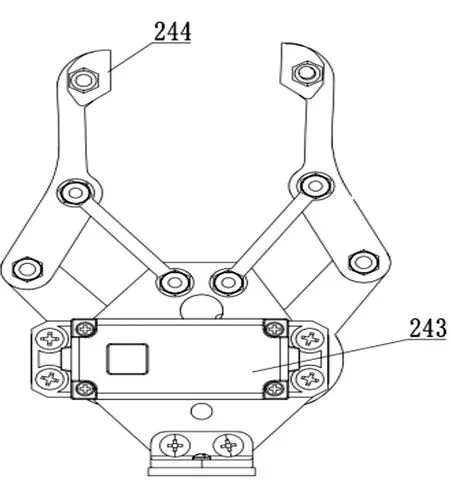
图4 夹取爪结构图
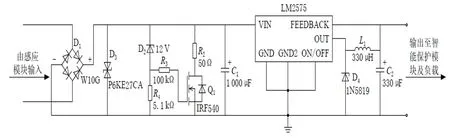
图5 执行机构电路图
舵机的通电要符合其额定电压,否则可能会出现高频抖动,导致舵机出现打齿等情况。在实验室实验中,通过设定电路中不同电阻值,根据P=I*U模拟不同的负载,并计算其功率,如表2 所示;绘出负载与输出功率关系图,如图6所示。
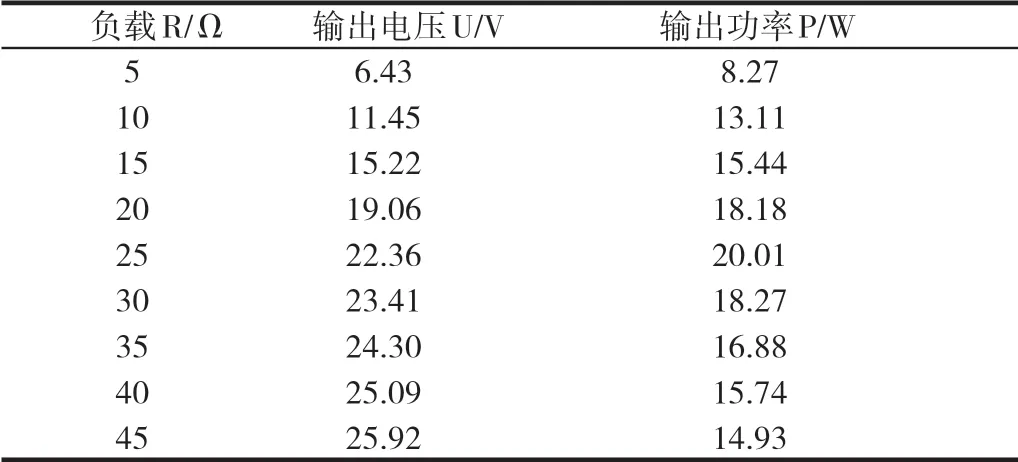
表2 不同负载功率表
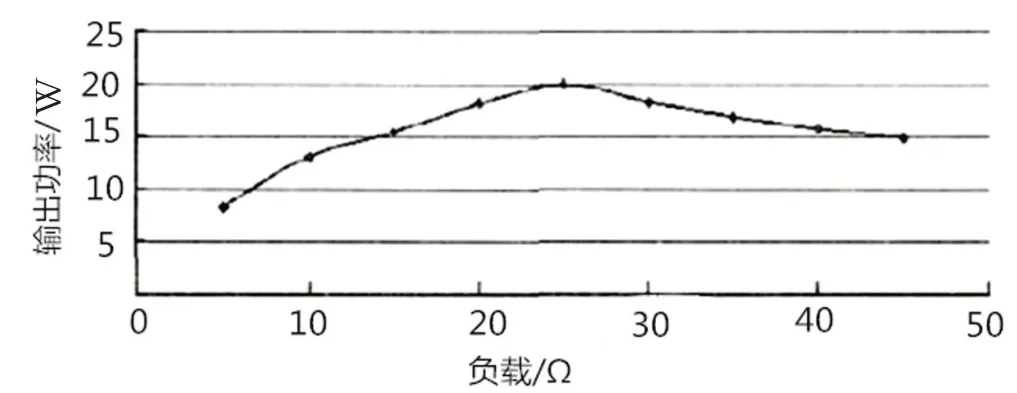
图6 负载与输出功率关系图
通过图像可知,输出功率最高时,负载电阻应在20 Ω~30 Ω,输出功率最大。
1.3 控制系统
控制系统选取微型电脑为主控,搭载AI 人工智能识别系统和北斗定位系统,控制机器人按规定的程序运动。该系统用Python 语言写入微型电脑主板,该主板处理完信息后,将信息以电信号传递给各个模块,使各个模块在统一指挥中进行统一行动。该系统的工作顺序为:1)将采摘花朵的颜色和尺寸等指标和采摘路线输入系统中,该系统通过计算规划出最优路径,配合北斗导航系统确定各个停滞点。2)主板将信息脉冲发送到电机,电机转动,驱动机器人前进,寻迹系统检测到达指定停滞点,向主板反馈一个信号,电机停止转动,同时激活摄像头,AI 自动识别系统此时锁定待采花朵,将图像灰度化处理后,以脉冲信号输送到触控板,通过KCF 算法计算出一、二、三、四级舵机转动角度,同时将PWM 信号传输给舵机,驱动机械臂转动,采摘锁定的玫瑰花朵,采摘后投入指定的容器中,完成对花朵的采摘。一个区域采摘结束后,电机转动,驱动机器人对下一个区进行识别采摘。控制逻辑图如图7所示。

图7 控制逻辑图
1.4 导航寻迹系统
玫瑰花采摘机器人配备导航寻迹系统,该系统能够确保在大型采摘场多批次机器人协同无缝采摘,且能根据场地自动校正路线,防止出现偏离路线现象。本机器人导航寻迹系统采用我国自主研制的北斗系统,该系统民用版误差在1 m以内。配合3S 技术,可以完成大体上的路线规划与定位。为了精细行进路线,防止机器人偏离路线,在机器人两侧增加了2排8路的传感器,这样可以通过北斗和传感器相互之间的配合,形成误差补偿。该传感器以二值状态工作,当行驶在预定路线时,输出12 V高电压;当偏离路线时,输出0低电压。这样根据高低电压的反馈,决定电机转速的高低,根据转速的高低就可以自动调整路线[4]。借助计算公式:
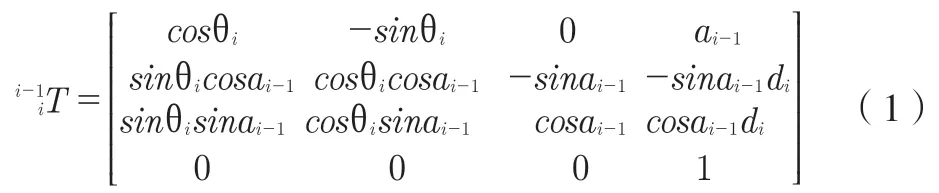
得到偏移误差的公式 :
然后根据各传感器的偏移误差得到总体的偏移误差:
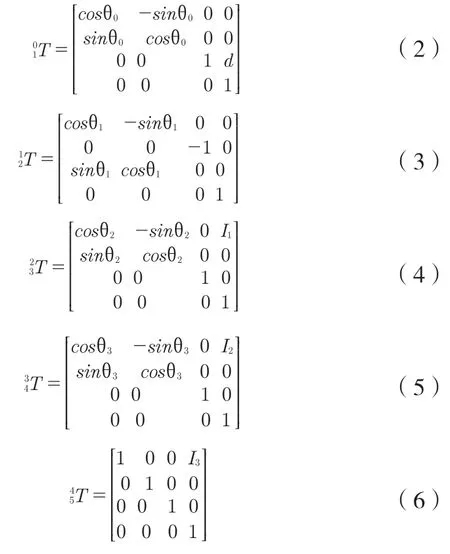
通过北斗系统输人x、y坐标,配合传感器的俯视探测角度,可以得到机体需要的旋转角度。
1.5 AI自动识别系统
AI自动识别系统定根据花朵的颜色和尺寸指标,机器自动对区域内的花朵图像进行提取以及灰度化处理,提取出其中的要素点,智能识别符合采摘要求的目标花朵,依次将目标信息传给微型电脑。为了使机器人在遮挡条件下依旧能够精准识别花朵,笔者选取了KCF算法,并且针对该算法的部分弊端进行了优化。
1.5.1 控制算法逻辑
在玫瑰采摘的过程中,由于整个过程是一一个动态过程,且在有遮挡的情况下对目标跟踪的准确率与跟踪速度有着较高的要求,而传统Python里的算法只能在无遮挡的环境下完成智能识别。因此,本机器人采用的是KCF(Kernel Correlation Filter)算法。该算法将傅里叶变换和循环矩阵相结合,提升相关反应速度,并利用H0G特征与核函数结合解决跟踪精度。
该算法中的样本存在一定的区别度,为精准区别,本算法优化了循环算法,该算法是一一个二维向量,为了方便理解,可以从一维向量开始演算。

将该方式运用到二维向量中,便可以发现图片在垂直方向.上发生平移,可自动将图片调整到正常位置。
通过实验,可以看到垂直方向位移循环效果,如图8所示。
对其进行傅里叶矩阵变换,得到以下公式:

如图8实验所示,在边缘附近都会存在一定的边缘效应,此时可加入余弦窗口进行填充与掩膜。

图8 垂直方向位移循环图
1.5.2 摄像头相关算法
双目立体视觉是通过计算机相关技术模仿了人两只眼睛捕捉到的信息,并对捕捉到的信息进行处理分析,可以得到目标物体的坐标位置[5]。摄像头为hv3808 镜头,该摄像头是COMS 的传感类型,拥有30 万动态像素,能提供480 P、30 PFS 高清晰度延迟图像,可将拍摄到的照片以最低0.1LUX传到微型电脑Open Source CV图像处理库,由于需要对玫瑰花的位置进行精准定位,普通的单摄像头无法完成相关定位,因此采用双目摄像头。双目摄像头的原理和人类的双眼定位原理相同,如图9所示。

图9 双摄原理图
图中OL和OR分别为左右两个成像设备的光轴中心,则OLOR即为基线,长度表示为B,分置于两边的图像用L和R来表示,P点是选取的任意一个空间目标点,距离目标最短的垂直距离可以用z 来表示。设该摄像头的焦距为,于是可以得到以下公式:

通过该公式,可以确定任意可视范围类的物体距离,为下一步的采摘预设好坐标。
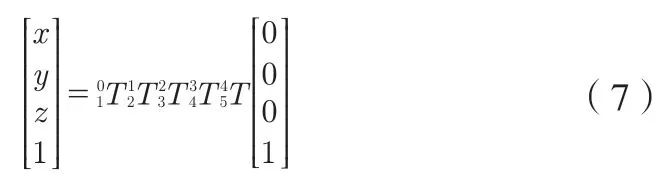
该双目摄像头采用的Census 算法,比传统算法在识别较多有顺序物体时存在一定的优势。但是其计算方式由于总是需要一个中心点,当中心点无法确定时,部分区域图像信息的平滑度将会受影响变得较低,为了解决这种问题,对该算法进行优化,优化算法如下所示:

ave(x,y)表示以中心点为匹配点的所有像素的平均灰度值,(X’,Y’)代表该图像中任意一点的像素点,(x’+i,y’+i)为下一像素点。
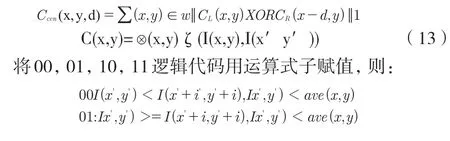
以一张婴儿图片来进行仿真模拟,如图10所示。
图10 仿真图
通过上图可以发现,改进后,图像中的噪点明显减少,抗干扰能力明显加强。通过大量模拟实验,得出优化前后的误匹配对比率如表3所示。

表3 误匹配对比率
2 机械人测试
2.1 抓取测试
当机器人开机时,设定特定的舵机复位伺服角度x=1 500,y=1 500,z=1 500,机械爪初始状态如图11所示。

图11 机械爪初始状态
机械爪在抓取玫瑰花朵时,准确率高,效果稳定,如图12所示。

图12 机械爪抓取目标
为了测试机器人的平均工作状态和工作性能,根据大数定律,判断机器人的工作稳定性及各项性能指标,对如下项目进行了测试,测试结果如表4所示。
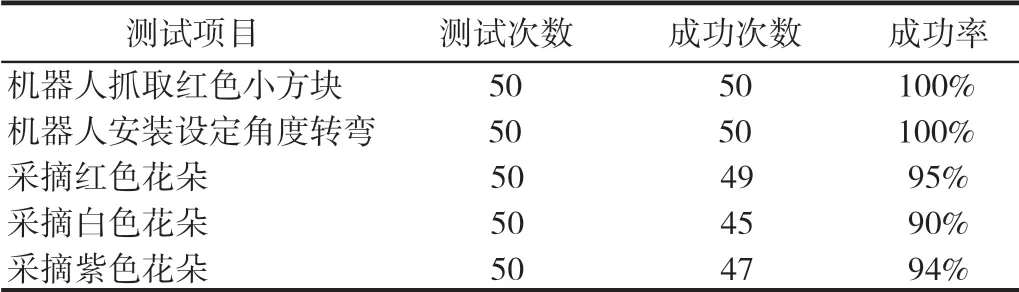
表4 测试统计表
根据测试结果,可以发现机器人在采摘过程中的成功率大都在95%以上,实验较为成功。在分析采摘效果时发现失误点大多出现在角落里,在这种角落里机械爪的活动受到限制。为了解决此问题,通过电机转速控制,采用电机倾转配合机械爪运动,通过读取霍尔传感器的位置信号与机械爪的舵机倾转信号,判断花朵所在位置,同时电机转速控制器对电机的转速做闭环控制,根据欧姆定律,控制输出的相电压即可实现转速控制。这种控制方法通过简单的六步换向改变电枢磁场,引领转子转动,调整电机位置,达到盲区采摘效果,相关控制如图13所示。
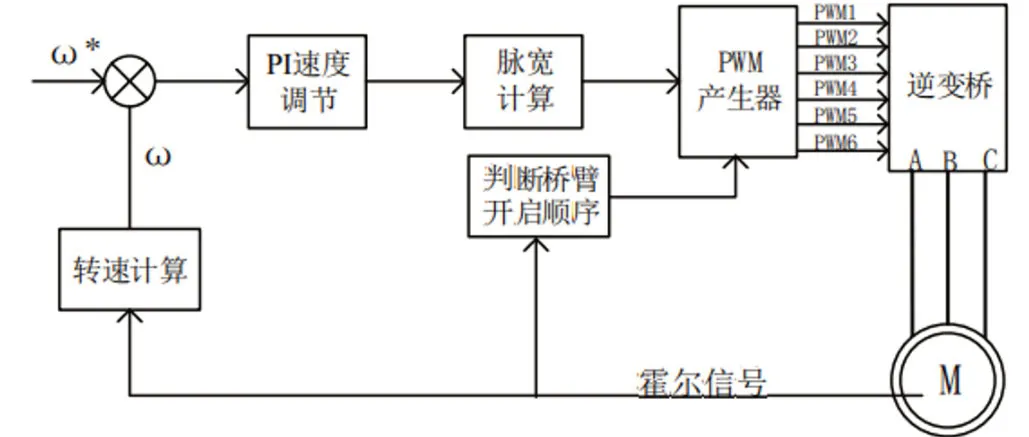
图13 方波控制逻辑图
2.2 定位测试
在实际操作中,机器人的定位误差以及误差校正决定着采摘的准确性和安全性,为此做了以下实验,相关数据如表5所示。

表5 定位误差统计表
相关实验数据表明,在200 m距离,误差不超过0.6 m,误差率0.30%,说明机器人的平均距离误差在可接受的误差范围之内,基本为一个可以预测的值,可以准确控制机器人的位置。
2.3 信号传输强度测试
在玫瑰采摘中,机器人往往在野外作业,为监测到采摘效果,及时发现机械故障,需要实时图传把现场画面传输回来,方便操作人员进行监管。在图传信号输出端采用枫叶2.4G八目定向天线,并测试了其辐射度,如图14所示。
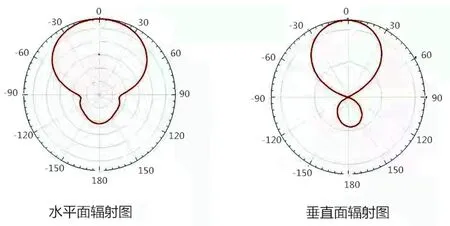
图14 辐射图
通过Matlab 模拟软件进行测试,发现该信号辐射范围可以达到20 km,足以应对国内大多数采摘场地。相关结果如图15所示。

图15 辐射范围图
模拟图中圆点为信号优良点,五角星为信号丢失点,三角形为信号良好点,通过观察可以发现大多数随机点的信号在良好以上,满足使用要求。
3 结论
笔者阐述了选择性玫瑰采摘机器人的硬件、软件设计,并完成了实验模拟测试,该机器人能根据人们的需求选择性采摘玫瑰,替代了人工采摘,提高了采摘效率,对玫瑰精加工是革命性进步。随着玫瑰采摘水平需求增高和科学技术的发展,玫瑰采摘机器人智能化也变得越来越重要。在以后的研究中,要加入5G 技术,为机器人系统提供稳定的数据传输和较低的通信时延,提高机器人对环境和控制命令的反应,最大程度优化机器人系统的运算能力[5-6]。这需要在设计与应用方面要有前瞻性,更多地使用现代科学技术,设计出效率更高、实用性更强的智能玫瑰采摘机器人。
猜你喜欢
今日农业(2022年16期)2022-11-09
中国交通信息化(2022年9期)2022-10-28
环球时报(2022-05-26)2022-05-26
汽车工程师(2021年12期)2022-01-18
商品与质量(2021年43期)2022-01-18
中华诗词(2019年12期)2019-09-21
中华诗词(2019年1期)2019-08-23
电子制作(2018年1期)2018-04-04
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
