基于北斗定位的车辆防追尾系统的研究与设计
2021-07-12 09:00乔应罗亚欧
新型工业化 2021年3期
乔应,罗亚欧
(西华大学西华学院,四川 成都 610039)
0 引言
目前随着车辆的迅速增多,道路交通安全事故也逐渐增多,并呈逐年上升的趋势,其中大部分交通事故是车辆追尾事故引发的[1]。为了有效预防车辆追尾,需要一种可以有效预防车辆发生追尾碰撞的装置。本项目拟采用北斗定位技术及相关的理论研究一种可以准确测量车辆行驶状态,发出车辆超速提示和车辆追尾风险提示,在小于安全车距时自动制动的装置,该装置具有广阔的市场和应用前景。
本项目采用北斗定位检测模块来检测车辆的速度和方向,可以有效判断车辆的状态。车辆处于运行时,系统自动开始确定车辆的位置,速度和行驶方向;雷达测距模块检测前方是否有车辆,若有车辆则测算出与前方车辆的车距。根据北斗获得的车速,雷达测距模块获得的车距,自动与安全车距车速进行比较,判断车辆与前方车辆是否有追尾风险。若无追尾风险,系统自动进入循环工作状态。一些现有的防追尾系统只能判断是否出现追尾危险,一旦达到临界条件就会触发警报装置,有些时候危险等级比较低,但警报触发的危险等级不具有清晰的辨识度,往往会起到相反的作用,增加司机的心理负担,有些司机可能由于紧张而做出错误的判断和行为。而该装置若判断出与前方车辆有追尾风险,处理器将分析出不同的追尾风险等级,根据不同的追尾风险等级,给予不同的语音报警提示。若危险等级较低,则开始语音报警提醒车主降低车速。若追尾风险等级较高,则开启报警,同时语音报警循环提醒车主注意减速,直到无追尾风险为止[2]。
若需要进行超车,当车主打开超车灯控制器,转向灯检测模块检测到超车信号,系统处于自锁状态,在超车过程中不会进行报警提示。当车主完成超车,车主关闭超车灯控制信号,系统检测不到超车灯信号,系统重新开始工作,继续实时监控车辆的状态信息。
1 系统总体结构
基于北斗定位的机动车防追尾控制系统总体结构如图1所示。该系统包括微处理器、北斗定位模块、雷达测距模块、转向灯检测模块、语音报警模块、故障原因显示模块及直流稳压电源。其基本工作原理是:微处理器通过北斗定位模块实时检测车辆速度,并通过雷达测距模块实时检测车辆与前车之间的距离,再将该距离与车辆当前车速所对应的安全制动距离进行比较,以判断车辆是否存在追尾风险以及相应的风险级别。如果当前车距小于相应的安全制动距离,则判断为存在追尾风险,且车距越小,则相应的风险级别越高。当微处理器判断出车辆存在追尾风险时,将控制语言报警模块发出限速及安全预警提示,并在风险级别越高时,发出不同的安全预警提示,以达到更好的警示效果,从而有效预防车辆追尾事故的发生。另外,转向灯检测模块用于检测车辆的转向信号,如检测到转向灯已开启,说明车辆正在变道行驶,此时将关闭语言报警模块功能;而当车辆转向信号消失,则重新开启语言报警模块功能。当系统运行出现故障时,可以在故障原因显示模块上显示对应故障原因及解决方案。该控制系统结构简单、性能可靠,具有较好的应用价值。
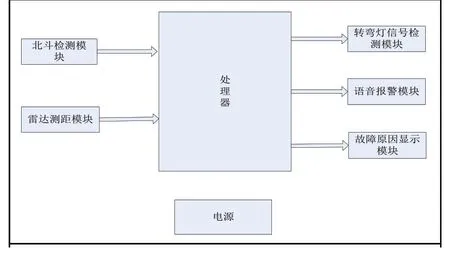
图1 系统总体结构框图
2 硬件设计
硬件设计包括北斗定位模块、雷达测距模块、电路及PCB板设计等,各部分设计将根据系统总体设计方案分步进行,其中的硬件设计和主要元器件选型简要介绍如下:
(1)北斗定位模块。采用Vogo公司所产型号为VOGO-919的北斗定位模块。该北斗定位模块检测精度从之前的10米大幅增加至1-2米,并且该模块内置电池,即使电瓶拆除也能持续工作3-8个小时。目前的北斗导航系统拥有两项重大改进,首先是道路规划时间大幅缩短,从之前的30秒降至3秒;其次是定位精度的提升,定位精准在1-2米级别,超越美国GPS,成为精度仅次于欧洲伽利略系统的定位导航系统,现阶段也已经可以判断车辆是在主路行驶还是在辅路行驶。该北斗定位模块能够完成相关的测量要求,可以很好地检测出车辆的实时状态[3]。
(2)雷达测距模块。采用24 GHz FMCW雷达系统。该模块的数字基带处理模块采用STM32F407微处理器,可完成数据采集与信号特征提取以及系统控制。系统测试电路对目标物距离的测量结果较准确,在12m~90m范围内测量误差不超过10%,该车载测距雷达能够实现90m的距离测量。这款24GHz FMCW车载测距雷达系统的设计结构简单、体积小,可满足雷达测距基本要求,能够作为车载防撞雷达原型机进行车载防撞雷达系统的研发。
(3)电路及PCB板设计。本项目的电路图如图2所示,PCB板设计图如图3所示。本项目的PCB板设计采用Altium Designed软件进行绘制,利用该软件进行基本的电路原理设计,再由电路原理图直接转化为PCB原理图,然后手动将各个元器件位置在PCB板上排列好,最好将各个引脚的元器件用导线连接。完成上述所有步骤后,通过软件的“Design Rule Check”选项来对PCB板做最后的编译与检查,当软件提示无错误无警告之后,整个PCB板的设计就完成了。

图2 电路图设计
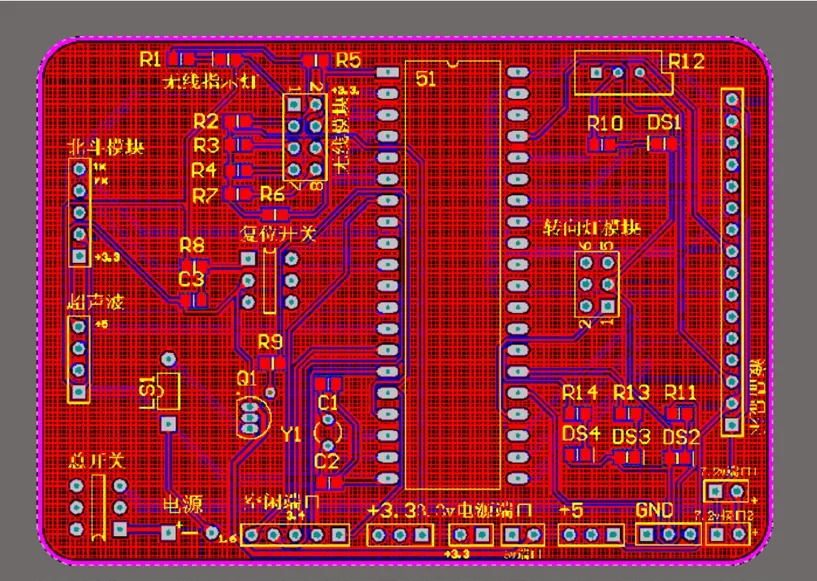
图3 PCB板设计
3 软件设计
本装置的基本软件流程图如图4所示。本装置先使用北斗定位模块检测车辆行驶状态,以辅助测试模块对车辆速度进行检测,雷达测距模块测量出与前车的距离,然后运用算法对实时情况进行分析,判断是否打开变道装置,是否有追尾危险。如果没有打开变道装置,而且有追尾危险,系统将会触发语音提示,紧接着触发报警提示,若打开变道装置或者没有追尾危险,将继续检测车辆的行驶信息,从而达到预防追尾事故的发生[4]。
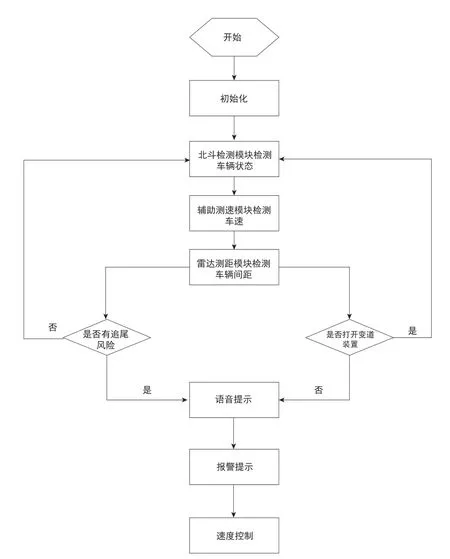
图4 程序流程图设计
4 创新点
采用北斗定位检测模块来检测车辆的速度,判断车辆的行驶状态,并与雷达测距模块测出的车距相结合,与各时速的可能追尾临界车距范围进行比较,判断不同的危险等级,进行分级预警,达到防止追尾事故的目的。
5 技术关键
采用北斗定位的方式对车辆进行定位并对其行驶状态中的速度等参数进行测量,通过算法判断是否处于或超越可能追尾临界车距范围,确定其车辆是否有追尾风险并分级预警。
6 常见故障分析
6.1 故障现象1:北斗定位模块不能提供定位信息
6.1.1 北斗定位模块供电电压异常
分析和解决方法:检查北斗定位模块的供电电源电压是否正常,若不正常,检查电源模块的输入电压是否正常,若其输入电压正常,则是电源模块出现了故障,需更换该电源模块;否则,需检查外部供电电源。
6.1.2 北斗定位模块出现故障
分析和解决方法:如果北斗定位模块的供电电压正常,而北斗定位模块不能实现正常的定位功能,同时其定位指示灯也没有正常显示,则可断定是北斗定位模块出现了故障,需更换该北斗定位模块。
6.2 故障现象2:液晶显示屏不能正常显示信息
6.2.1 液晶显示屏供电电源出现故障
分析和解决方法:检查液晶显示屏的供电电压是否正常,若不正常,则检查其电源模块的输入电压是否正常,若其输入电压正常,而电源模块不能给液晶显示屏提供正常的供电电压,则是电源模块出现了故障,需更换该电源模块[5]。
6.2.2 液晶显示屏出现故障
分析和解决方法:如果液晶显示屏的供电电压正常,液晶显示屏的通信线路连接也正常,而液晶显示屏不能正常显示信息,则可断定液晶显示屏已损坏,需更换该液晶显示屏。
6.3 故障现象3:无法获得与前车的车距
6.3.1 雷达测距模块出现故障
分析及解决办法:检查雷达测距模块的指示灯是否正常点亮,若没有,可能是雷达测距模块供电部分出现问题,应检查供电部分线路。若电源指示灯正常点亮,则是雷达测距模块出现问题,可以更换雷达测距模块。
6.3.2 雷达测距模块安装出现错误
分析及解决办法:查看雷达测距模块的安装位置,看雷达测距模块是否处于正常的安装位置,雷达测距模块应该处于正向向前的位置。若没有,应该调整好位置,在调整中,注意不要损坏雷达测距模块。
7 结语
目前随着车辆的迅速增多,道路交通安全事故也逐渐增多,其中大部分交通事故是由车辆追尾事故引发的。为了有效预防车辆追尾,目前普遍使用毫米波雷达、激光技术等方式实现车辆间距的测量,再根据车速与车间距的关系评估追尾风险。但这类防追尾装置的测量器件都是安装在车辆上,易受到地形、路面车辆状态的影响,存在较大的误差,不能发出准确有效的预警提示,所以需要一种更精确、更能适应复杂环境的新装置来实现车辆间距测量功能[6-7]。而基于北斗定位的车辆防追尾装置利用北斗定位模块可以准确获得车辆的速度,行驶方向,雷达模块可以准确测量车辆间的距离,在车辆速度超过安全速度时,分级报警并限速,达到预防车辆追尾的作用。该控制系统结构简单、性能可靠、成本低,有较好的应用价值与实用价值,能在更大程度上减少交通事故的发生,为人们开车出行保驾护航,减少因交通事故而造成的经济损失。
猜你喜欢
军事文摘(2022年10期)2022-06-15
汽车实用技术(2022年4期)2022-03-07
科学(2020年3期)2020-01-06
作文大王·低年级(2019年2期)2019-01-23
莫愁·时代人物(2018年7期)2018-09-12
莫愁(2018年20期)2018-07-19
电子制作(2017年7期)2017-06-05
中国照明(2016年6期)2016-06-15
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
电子设计工程(2015年8期)2015-02-27