机器视觉在无人机智能避障的应用方法研究
2021-07-12 09:00董振鹏龙飞虎周德旭
新型工业化 2021年3期
董振鹏,龙飞虎,周德旭
(尚良仲毅(沈阳)高新科技有限公司,辽宁 沈阳 110000)
0 引言
随着科学技术和电子信息技术的发展,无人机领域也得到了飞速的发展。现阶段无人机被广泛应用于民用和军用之中,在高温、极寒等环境下无人机也可以辅助人们开展工作。随着无人机应用的领域越来越广,人们对无人机的性能要求也在不断提高,特别是在无人机的续航、避障和自主跟踪等方面。无人机是否能够智能避障关乎着无人机的安全性能。当前无人机大多采用超声波避障技术或是激光雷达避障技术,这两种避障技术受自然环境的影响较大,制约了无人机的发展。随着机器视觉的出现和发展,将机器视觉应用到无人机智能避障的呼声不断出现。本文对机器视觉在无人机智能避障上的应用方法进行分析,以供参考。
1 无人机避障方法
1.1 超声波避障
当前无人机避障大多采用超声波避障,只要知道无人机发射的超声波到障碍物的往返时间就能计算出测量距离,从而进行避障。超声波避障当前主要应用于无人机和汽车行业中,超声波避障具有性价比高、较为便携、抗干扰能力强等优点。但是超声波避障的测量距离有限,一般只能测量5m左右的距离,并且障碍物表面的材质对于超声波的测量也会造成干扰[1]。
1.2 激光雷达避障
当前无人机避障采用的另一种形式是激光雷达避障。激光雷达避障是通过发射器发射光脉冲再通过接收器接受光脉冲来进行测距和避障。当前激光雷达避障法常采用时间测量法和三角测量法来进行距离测算。无人机通过激光雷达避障既避免了超声波避障测量距离有限的缺点,还避免了障碍物表面材质对测距造成干扰的问题,测量精度相对较高。但是由于激光雷达避障是通过发射光脉冲来进行测距的,在使用的过程中容易造成光污染[2]。
1.3 机器视觉避障
机器视觉避障就是通过摄像机对障碍物进行拍摄,并通过智能计算来对拍摄到图片进行对比识别的方式进行距离测算,从而进行避障。相比于超声波避障和激光雷达避障,机器视觉避障能够自主地进行光源信息的接收,从而获得更大的信息量。但这也对无人机的硬件处理器的处理能力提出了更高的要求。
2 机器视觉避障
2.1 摄像机成像原理
摄像机的成像原理是通过镜头将物体拍下来,再通过图像传感器将光信号转变成为数字图像,然后通过图像处理器将转换后的数字图像进行储存。摄像机成像的原理如图1所示。
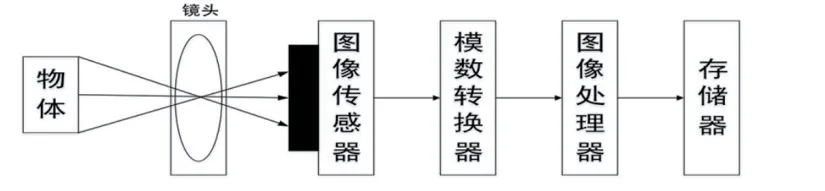
图1 摄像机成像原理
2.2 图像处理
对于图像处理一直有一种共识,就是图像在获取、转换与传输的过程中极有可能会被外界环境所污染,导致图像的质量受到损害。因此在进行机器视觉的研究过程中就需要对摄像机拍摄到的图像进行预先处理,并且要对阀值进行一定的切割,同时还要对拍摄路径进行跟踪。摄像头拍摄到的图像不仅包含所需要的元素还存在很多无用的冗杂的信息,如果不对这些无用的信息进行处理,就会干扰最后的避障效果。因此就需要对摄像机拍摄到的信息进行预先处理,剔除不需要的信息。
2.3 障碍物的识别
对障碍物进行识别最重要的就是要及时对前方是否存在障碍物进行检测和判断,同时要对选定的目标通过轨迹描述进行跟踪,最后要对障碍物和无人机之间的距离进行定位与测算。对障碍物进行识别中最基础的就是对障碍物进行检测,然后是对障碍物与无人机之间的距离进行测算[3]。
空间目标的跟踪是指根据具体目标的特征来建立模版,然后再通过和系统中的图像序列进行对比搜寻,选取和建立的模版之间最相像的图像序列的过程。通过对空间目标的跟踪可以确定具体目标在图像序列中的轨迹。当前对空间目标进行跟踪时首先要通过搜索算法来对搜索区域进行筛选,将跟踪目标的具体位置进行大致的区分,以此来减轻进行目标搜索时的工作量。对空间目标的位置进行区分的时候往往采用以下两种算法进行区域筛选。第一种是通过对空间目标大致出现在图片序列的帧数进行预测,之后根据预测的范围寻找最优的那一点,较为常用的算法有Kalman滤波及其扩展版等。第二种算法是通过缩小空间目标的搜索范围来优化所需要搜索的方向与范围。这种算法可以优化目标模版与图像序列之间的迭代过程,从而起到减小搜索范围的效果。
对空间目标进行跟踪主要是为了获取无人机上面安装的摄像头与场景中障碍物之间距离,这一步即是机器视觉重要的任务之一也是最终识别障碍物的重要目标之一。通过摄像头拍摄前方场景来对障碍物与无人机之间的距离进行数据的采集,并通过对获取的参数进行计算来测算障碍物与无人机之间的速度数据,为无人机通过这种机器视觉进行智能化避障提供数据支撑[4]。
3 双目视觉测距理论
双目视觉测距理论是指利用视觉差来进行距离测算。通过安装在无人机上的两个互相平行的摄像头对前方场景进行拍摄,再利用两个摄像头拍摄到的画面的差异之处也就是视觉差,通过一系列的计算测算出障碍物与无人机之间的距离。通过这种方式测算出来的数据精确度较高,具有较强的参考价值。
双目视觉测距的原理是两个互相平行的摄像头由于位置的不同拍摄到的画面具有一定的差距,本质是三角测距理论。两个摄像头即便拍摄同一目标物,在成像后目标物的像素位置也会有一定的不同之处,通过三角测距的算法就可以测算出目标物与无人机之间的实际距离,从而能够帮助无人机躲避障碍物。
通过双目视觉测距法来进行测距时要掌握两个要点。首先是准确识别到障碍物,即无人机上安装的相互平行的两个摄像头要准确掌握障碍物在图像中呈现出的具体大小和方位。其次是在进行拍摄过程中通过两个摄像头拍摄障碍物图像的不同来寻求两者之间的立体匹配点,获取立体匹配点在后期进行测算的时候能够获得更加深度的数据信息,更好帮助无人机通过机器视觉的运用进行智能避障。第一个要点是获得第二个要点的基础,通过第一个步骤对障碍物进行拍摄的时候图像中可能存在多个障碍物体,只有通过第二个步骤找寻立体匹配点才能更加精准地对无人机所要躲避的障碍物进行标记,才能更好地测算障碍物与无人机之间的距离,更好地实现无人机的智能避障[5]。
4 无人机避障的关键
首先是飞控。无人机的飞控是将无人机与航模区分开来的主要标志之一,通过飞控使无人机能够实现自主飞行,从而能够更好帮助人们完成工作。其次是云台。通过云台可以降低无人机身上架设的摄像头受无人机飞行产生的抖动影响,能够提高摄像头拍摄画面的精准度和提升摄像头的转动范围。再次是图传。图传主要考虑的是无人机和接收端的传输距离与传输的质量和延时程度。当前占据消费主流的无人机使用传输距离在600-800m左右的2.4GHz WiFi的图传。当前市场上的高清图传价格较为昂贵,虽然高清图传能够实现更远距离的传输并具有更高画质的图像,但是当前使用较多的无人机还是以拍摄更加专业的航拍为主。再次是无人机的计算机视觉,无人机通过对计算机视觉的使用能够实现手势操作,能够实现双目视觉深度测算。但是由于当前大部分无人机硬件设施不能满足计算机视觉的需要,能够完成计算机视觉的无人机类型还比较有限。最后是避障。如上文所说无人机通常采用超声波和雷达激光等方式进行避障。当前对于无人机的避障功能的开发还是没有得到足够的重视,其实为了提升无人机的安全性和为了保障他人的生命财产安全,提升无人机的避障效果是非常重要的,如果无人机的避障效果得到显著的提升,那么无人机能够得到应用的范围也会愈发广泛[6]。
5 结语
随着经济的发展和信息技术水平的提升,无人机在我们的生活中应用的领域越来越广。而随着无人机应用领域的拓展,对于无人机的性能也提出了更高的要求。对于无人机的避障系统进行研究的呼声也越来越高。本文对无人机在飞行过程中对于障碍物的识别的方式和双目视觉测距理论等进行探讨,同时对当前无人机避障的关键进行了分析。将机器视觉运用到无人机的避障中是一项非常具有挑战性的课题,通过对无人机避障的研究可以提升无人机避障的水平,从而推动无人机在更广泛的领域得到应用。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
科学(2020年3期)2020-01-06
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
电子制作(2017年7期)2017-06-05
中国工程咨询(2017年3期)2017-01-31
通信电源技术(2016年5期)2016-03-22
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
数学物理学报(2015年4期)2015-02-28