
路面不平顺激励下车辆系统振动响应谱矩的简明封闭解
2021-07-12 03:14李创第李宇翔葛新广
广西科技大学学报 2021年3期
李创第 李宇翔 葛新广
摘 要:工程上常将路面不平顺看作具有零均值的平稳随机过程.针对路面不平顺激励下车辆系统随机振动响应无封闭解的问题,提出了一种简明封闭解法.综合运用复模态法和虚拟激励法将基于不平顺路面谱激励下的车辆系统的响应功率谱二次正交化,获得了车辆系统随机振动响应方差、0—2阶谱矩及绝对加速度方差的简明封闭解.运用本文方法对一类车辆系统的振动进行分析,并与虚拟激励法进行对比.研究表明本文方法所得方差和谱矩的封闭解法的正确性.
关键词:路面不平顺;谱矩;简明封闭解;功率谱二次正交化
中图分类号:U461.56 DOI:10.16375/j.cnki.cn45-1395/t.2021.03.003
0 引言
工程上将路面不平顺作为一种平稳随机激励[1-3],是引起行驶中的车辆系统振动的根源,影响着驾乘人员的舒适度[4-6],国内外许多学者近年来对此进行了大量的研究[3-4,7].方同等[8]从时域法的角度研究了车辆系统的随机振动问题,但响应方差的表达式较为复杂.桂水荣等[9-10]将一类车辆系统等效为九自由度弹簧-阻尼-质量模型,运用虚拟激励法研究了车辆系统随机振动响应的功率谱.张宝海等[11-12]则是由虚拟激励法对车辆随机振动平稳性进行了分析,获得了响应的功率谱.上述基于虚拟激励法所获得的车辆系统振动的功率谱,需要经过数值积分才能获得车辆系统振动响应的方差和谱矩,存在计算精度不高和效率低下的问题,不易于工程应用.
针对已有方法分析路面激励下车辆系统响应分析存在的不足,基于功率谱的二次正交化法[13-14]成功获得了车辆系统振动响应的0—2阶谱矩及加速度方差的简明封闭解法.首先,基于留数定理[15]提出了路面谱的二次正交式;其次,利用复模态方法[3]和虚拟激励法[16]提出了车辆系统随机振动响应的频率响应特征值函数的二次正交式,进而获得车辆系统响应功率谱密度函数的二次正交式;最后,根据随机振动理论中谱矩的定义,获得了车辆系统随机振动响应的0阶、2阶和4阶谱矩的简明封闭解.
1 车辆系统受路面不平顺激励下的统一
频域解
1.1 车辆系统受路面不平顺激励下的振动方程
目前我国于公路行驶的载重车辆主要是二轴、三轴汽车.本文选择较为常见的三轴民用自卸汽车作为研究对象,考虑车体竖向振动、俯仰翻转以及车轮的振动,将车辆简化为5个自由度的振动体系,车辆简化模型如图1所示.
图1 整车模型
图1中车辆各参数的含义如下:
[kf1、kf2、kf3]为车辆前、中、后轴悬架弹簧刚度;[kt1、kt2、kt3]为前、中、后轴车轮刚度;[cf1、cf2、cf3]为车辆前、中、后轴悬架阻尼系数;[ct1、ct2、ct3]为车辆前、中、后轴车轮阻尼系数;[mf1、mf2、mf3]为车辆前、中、后轴悬架系统质量;[Icx]为车厢俯仰转动惯量;[θ]为俯仰角;[mt1、mt2、] [mt3]为车辆前、中、后轮胎质量;[a、b、c]为前、中、后轴到车辆质心的距离;[zf1、zf2、zf3]为车辆前、中、后轴悬架系统相对于地面的位移;[zcx]为车厢质心相对于地面的位移.
建立五自由度整车模型振动方程为:
[Mz+Cz+Kz=αr] (1)
其中:[z、z、z]分别为车辆系统各自由度相对于地面的加速度、速度和位移,[M]为车辆系统的质量矩阵,[C]为车辆系统的阻尼矩阵,[K]为车辆系统的刚度矩阵,[r]为路面不平度.其表达式分别为[M=diag(mf1, mf2, mf3, mcx, Icx)],
1.2 车辆系统响应的频域统一解
引入状态变量:
[y=zzT] (2)
可将车辆系统(1)改写为:
[My+Ky=αr] (3)
式中:
[M=01MMC, K=-M0101K,α=02αT]
其中:[01]為5×5矩阵,其元素均为0;[02]为5×1矩阵,其元素均为0 ;T为矩阵转置.
由复模态法理论可知,存在左右特征向量[V]、[U]和特征矩阵[p]使方程(3)解耦.特征矩阵[p]可由方程(3)的特征值方程解得:
[Mp+K=0] (4)
式中,[·]表示行列式.
左、右特征向量也可由式(3)的特征值方程得:
[Mp+KU=0, Mp+KTV=0] (5)
式中,特征矩阵[p]:
[p=VTKUVTMU] (6)
引入复模态变换:
[y=Ux] (7)
将式(7)代入式(3)得:
[MUx+KUx=αr] (8)
简化得:
[x+px=ηr] (9)
式中:[η=VTαVTMU],为[10×10]矩阵.
由于[p]为对角矩阵,可得出式(9)的分量形式如下:
[xk+pkxk=ηk,ir(k=1, 2, …, 10)] (10)
式中,[ηk,i]表示[η]矩阵中第[k]行第[i]列的元素.
由虚拟激励法可以得出式(10)的频域解如下:
[xk(ω)=ηkpk+jωSr(ω)ejωt] (11)
其中:[j=-1].
由式(2)和式(7),车辆系统响应的频域解:
[z=k=110(Ul,kxk(ω))] (12a)
[z=k=110(Ul+5,kxk(ω))] (12b)
其中:[Ul,k]表示右特征向量[U]第[l]行第[k]列的元素.
从式(12)可知车辆系统响应的位移及速度,可统一表示为:
[D=k=110(Ul,kxk(ω))] (13)
2 车辆系统频域响应特征函数
的正交式
由虚拟激励法,则[D]的响应功率谱为:
[SD(ω)=k=110i=110(Ul,kUl,ixk(ω)x?i(ω))] (14)
其中:[z?k(ω)]是[zk(ω)]的共轭项,即[z?k(ω)=zk(-ω)].
由式(11)可知, [D]的响应功率谱为:
[SD(ω)=k=110i=110(Ul,kUl,iηkpk+jωSr(ω)×ejωt×]
[ηipi-jωSr(ω)×e-jωt)=Sr(ω)HD(ω)] (15)
式中:
[HD(ω)=k=110i=110(Ul,kUl,iηkpk+jω×ηipi-jω)] (16)
由式(16)可知,[H(ω)]与激励无关,与系统的模态特征值和要分析的响应量的模态参与系数有关,故称之为系统频域响应特征函数.
对式(16)简化为:
[H(ω)=k=110(U2l,kAk)+k=19i=k+110(Ul,kUl,iBi,k)] (17)
式中:
[Ak=xkx?k] (18a)
[Bi,k=xix?k+xkx?i] (18b)
将式(11)代入式(18a)可得:
[Ak=ηkpk+jω×ηkpk-jω] (19)
将式(11)代入式(18b)可得:
[Bik=ηkpk+jωηipi-jω+ηkpk-jωηipi+jω] (20)
对式(20)以下部分进行简化:
[1pi+jω1pk-jω+1pi-jω1pk+jω=1pi+pk(1pi+jω+1pk-jω+1pi-jω+1pk+jω)=]
[1pi+pk(2pip2i+ω2+2pkp2k+ω2)] (21)
把式(21)代入式(20)則:
[Bik=ηkηipi+pk(2pip2i+ω2+2pkp2k+ω2)] (22)
把式(19)、式(22)代入式(17),则结构的系统频域响应特征函数为:
[HD(ω)=][k=110U2l,kη2kp2k+ω2+2k=19i=k+110Ul,kUl,iηkηipi+pk(pip2i+ω2+]
[pkp2k+ω2)] (23)
3 路面谱的二次正交式
由文献[8]提出的车辆行驶时的空间域谱表达式为:
[Sr(k)=1πV(k20+k2)(k20-k2)2+4V2k2] (24)
式中:[V=0.1] [s-1],[k20=0.1] [s-2].
式(1)的正交化形式:
[Sr(k)=1πV(k20+k2)(k20-k2)2+4V2k2=1πi=12dik2+k2i]
式中:
[k21=-k21,k22=-k22,d1=V(k20+k21)k21-k22,d2=V(k20+k22)k22-k21,k21=k20-2V2+4VV2-k20,k22=k20-2V2-4VV2-k20]
圆频率功率谱与空间域功率谱的关系为:
[Sr(ω)=1vSr(k)] (25)
式中:[v]为速度.
则可得出路面不平顺激励下车辆系统的相应功率谱为:
[Sr(ω)=vπ(d1ω2+(vk1)2+d2ω2+(vk2)2)] (26)
将式(26)和式(23)代入式(15)可知,D的响应功率谱为:
[SD(ω)=k=110(U2l,kη2kp2k+ω2vπ(d1ω2+(vk1)2+d2ω2+(vk2)2))+ 2k=19i=k+110(Ul,kUl,iηkηipi+pk(pip2i+ω2+pkp2k+ω2)vπ·]
[(d1ω2+(vk1)2+d2ω2+(vk2)2))] (27)
4 车辆系统响应谱矩的新解法
由隨机振动理论[3]可知,随机激励作用下线性结构位移响应的0阶谱矩都与位移响应的方差相等;位移响应的2阶谱矩与速度响应的方差相等;位移响应的4阶谱矩与速度响应的2阶谱矩相等,同时也与加速度的方差相等,而振动加速度是结构舒适度分析的主要参数.位移响应的1阶谱矩是基于Markov分布的动力可靠度分析的重要参数之一,为此需要对结构位移响应的0—2阶及4阶谱矩进行分析.
由随机振动理论可知,结构动力响应的谱矩的定义:
[αD,q=0∞SD(ω)ωqdω (q=0, 1, 2)] (28)
4.1 车辆系统响应0—2阶谱矩分析
把式(27)代入式(28),则结构响应的[q]阶谱矩:
[αD,q=][k=110(U2l,kη2kχk,q)+k=19i=k+110(Ul,kUl,iηkηipi+pk(2piχi,q+2pkχk,q))]
(29)
其中:
[χk,q=0∞Sr(ω)1p2k+ω2dω] (30)
对[χk,q]进行积分,可获得封闭解,推导过程见附录.
[χk,0=d1p2k-(vk1)π2(1(vk1)-1pk)+d2p2k-(vk2)π2(1(vk2)-1pk)];[χk,1=d121p2k-(vk1)ln(p2k(vk1))+d221p2k-(vk2)ln(p2k(vk2))];
[χk,2=d1π2pk-(vk1)χk,0+d2π2pk-(vk2)χk,0].
4.2 车辆系统响应的4阶谱矩分析
车桥耦合振动舒适度取决于车辆系统的绝对加速度.由随机振动理论可知,车辆系统绝对加速度的方差等于车辆系统绝对位移的4阶谱矩,而绝对位移的4阶谱矩等于绝对位移变化率的2阶谱矩.由式(12b)及式(28)可知,车厢竖向位移的绝对加速度可表示为:
[σ2z4=αz4,2=k=110(U9,kU9,kηkηkχk,2)+]
[k=19i=k+110(U9,kU9,iηkηipi+pk(2piχi,2+2pkχk,2))] (31)
俯仰转角的绝对变化率可表示为:
[σ2z5=k=110(U210,kη2kχk,2)+]
[2k=19i=k+110(U10,kU10,iηkηipi+pk×(piχi,2+pkχk,2))] (32)
由式(28)、式(30)—式(31)可知,本文获得了车辆系统响应0—2阶谱矩和加速度方差的封闭解,在计算响应时无需积分,相对于传统方法具有良好的计算精度和效率.
5 算例
本文参考文献[9]选取一辆三轴民用自卸汽车以[40] km/h的速度于某公路上行驶时的情况, 其前、中、后轮质量分别为[mt1]=297 kg、[mt2]=466 kg、 [mt3]=466 kg;车厢质量[mcx]=30 542 kg;前、中、后轴距车身的距离和车辆质心的距离分别为[a]=3.4 m、[b]=0.2 m、[c]=1.4 m;车厢侧翻转动惯量为[Icx]=6 893 kg·m2;前、中、后轮的刚度系数分别为[kt1]=3 390 N·mm-1、[kt2]=3 390 N·mm-1、[kt3]=3 390 N·mm-1;前、中、后轴悬架刚度系数分别为[kf1]=7 900 N·mm-1、[kf2]=7 900 N·mm-1、[kf3]=27 300 N·mm-1;前、中、后轴悬架阻尼系数分别为[cf1]=27 300 N·S·mm-1、 [cf2]=3 800 N·S·mm-1、[cf3]=3 800 N·S·mm-1;前、中、后轮胎阻尼系数均为[0].
5.1 路面谱的等效形式验证
图2为本文所提路面谱的二次正交式与其有理式的差值趋势图,[ΔS(ω)]值很小,可忽略不计且逐渐趋近于0,验证了本文所提二次正交式的正确性.图3为本文方法的路面功率谱与传统的虚拟激励法的路面功率谱的对比,由图3可知,功率谱基本重合,从而可知本文方法的功率谱的正确性.
5.2 本文方法的验证
虚拟激励法分析结构响应方差和谱矩时需对功率谱密度函数在[0, ∞)区间进行积分,常采用在显著频率范围内进行数值积分,而显著频率范围是随着激励和结构振动特征有关,为了达到精度要求,常需要对显著区间进行试算.积分步长越小,积分上限越大,虚拟激励法越准确.为此,通过虚拟激励法的积分区间和积分步长对精度的影响进行分析来验证本文方法的正确性.
5.2.1 积分区间对虚拟激励法精度的影响分析
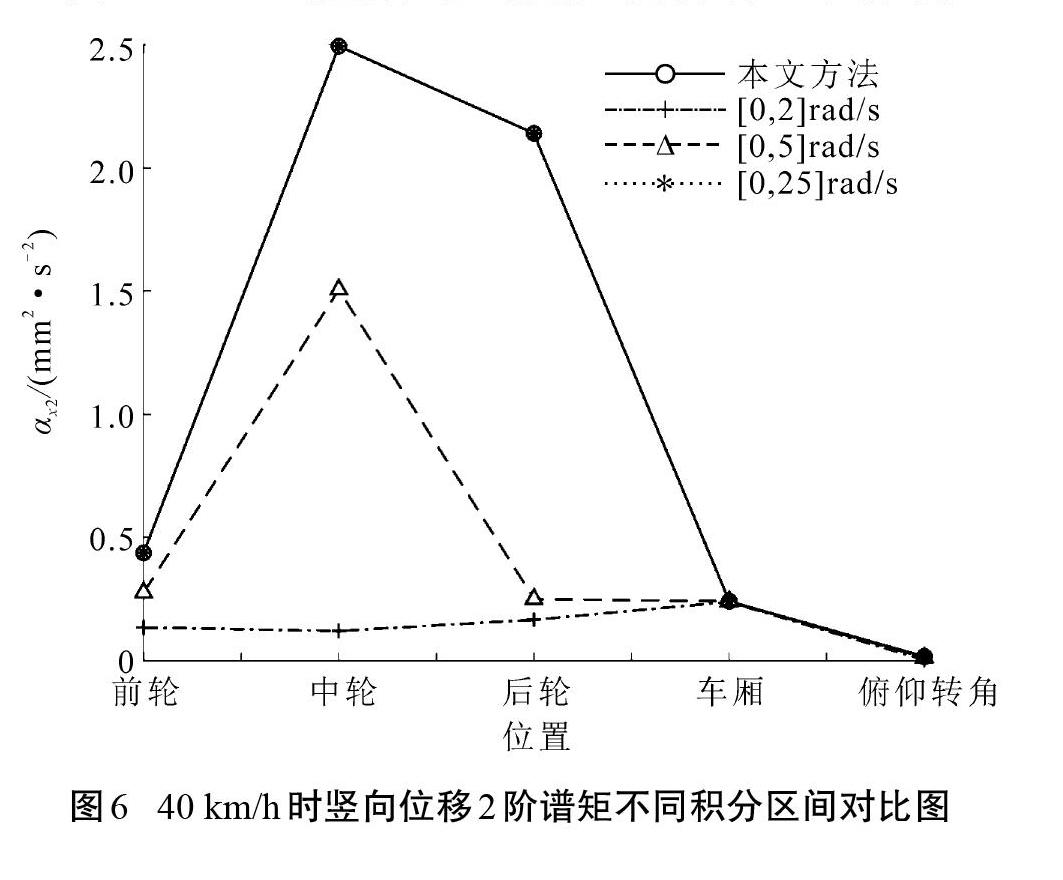
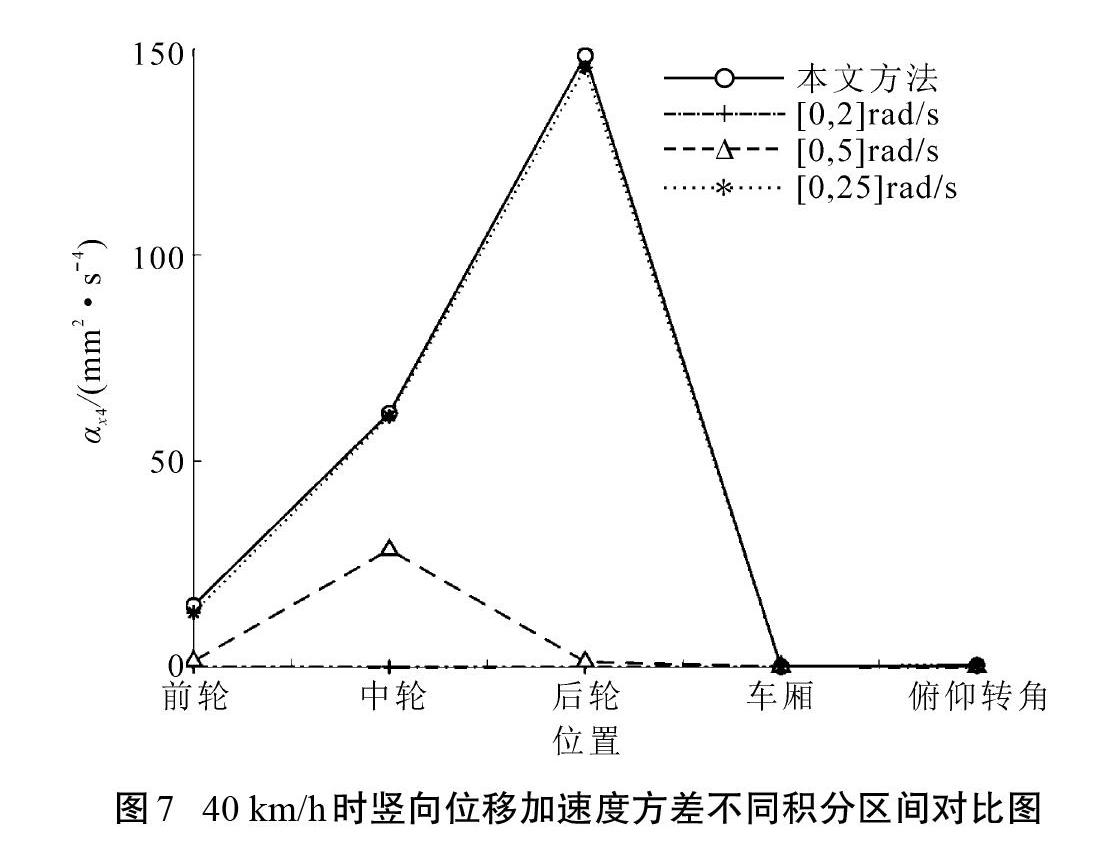
虚拟激励法的积分区间分别取[0, 2] rad/s、 [0, 5] rad/s、[0, 25 ]rad/s,计算车辆系统随机振动位移的谱矩并与本文方法进行对比,如图4—图7所示.从各图可知,随着积分步长的增加,虚拟激励法所得结果逼近本文方法,从而说明本文方法为封闭解.
从图4可知,对于0阶谱矩,虚拟激励法的积分区间取[0, 5] rad/s,即可达到很高的精度;对于结构响应1—2阶谱矩、加速度方差,从图6和图7可知,虚拟激励法的积分区间取[0, 25] rad/s才可以达到很高的精度.
5.2.2 积分步长对虚拟激励法的影响
根据4.2.1的分析可得,积分区间为[0,25] rad/s时,虚拟激励法与本文方法在计算谱矩时完全吻合.为了分析虚拟激励法积分步长对其精度的影响,分别取3种积分步长为1.000 rad/s、0.100 rad/s、0.001 rad/s.图8—图11所示为不同积分步长下虚拟激励法分析谱矩与本文方法的对比图.从图中可以得出,随着积分步长的减小,计算结果与本文方法越接近,由此可以验证本文方法的正确性.
6 结论
本文研究了基于方同路面谱的车辆随机振动响应0—2阶谱矩及加速度方差的简明封闭解,获得如下结论:
1)本文综合运用复模态法和虚拟激励法将基于不平顺路面谱激励下的车辆系统的响应功率谱表示成系统复模态振动特征值与频率自变量平方和的倒数的线性组合,即响应功率谱的二次正交化,为车辆系统结构响应0—2谱矩及加速度方差的封闭解奠定基础.
2)利用本文方法可以方便获得结构位移、结构位移变化率的统一显式简明表达式,并得出了车辆系统随机振动位移的0阶、2阶和4阶谱矩的封闭解析解,与虚拟激励法进行比较,从而验证了本文方法的正确性.
参考文献
[1] 方同,孫木楠,张天舒.车辆由路面激发的演变随机响应[J].振动工程学报,1997(1):88-93.
[2] 徐东镇,张祖芳,夏公川.整车路面不平度激励的仿真方法研究[J].图学学报,2016,37(5):668-674.
[3] 方同.工程随机振动[M]. 北京:国防工业出版社,1995.
[4] 陈勇杰. 基于随机振动的车辆舒适性研究[D].郑州:郑州大学,2017.
[5] 张丙强,李亮.人-车-路耦合系统振动分析及舒适度评价[J].振动与冲击,2011,30(1):1-5,15.
[6] 郑育龙.某大型特种运输车平顺性分析及优化[D].北京:北京理工大学,2015.
[7] 张丽萍.受随机激励车辆非平稳行驶平顺性分析及控制研究[D].沈阳:东北大学,2012.
[8] 方同,孙木楠.两类演变随机激励下的响应问题[J].西北工业大学学报,1997(4):42-49.
[9] 桂水荣,陈水生,万水.路面激励空间效应对车桥耦合随机振动的影响[J].振动.测试与诊断,2019,39(3):611-618,675.
[10] 桂水荣,陈水生,万水.基于路面一致激励车桥耦合非平稳随机振动分析[J].振动.测试与诊断,2018,38(5):908-915,1077.
[11] 張宝海,张勇,孙占瑞.基于虚拟激励法的消防救援车振动平稳性研究[J].工程机械,2020,51(1):17-22,8.
[12] 卞安华.基于虚拟激励法车辆平稳性分析[J].湖北农机化,2019(6):57.
[13] 邹万杰,邬丽霞,李创第,等.基于Kanai-Tajimi谱的单自由度广义Maxwell耗能结构响应及谱矩解法[J].广西科技大学学报,2020,31(2):17-24.
[14] 李暾,张梦丹,姜琰,等. 基于近似Davenport风速谱的建筑结构动力响应的新封闭解法[J]. 广西科技大学学报,2020,31(4):1-10,18.
[15] 周羚君,韩静,狄艳媚.复变函数与积分变换[M].上海: 同济大学出版社, 2017.
[16] 林家浩,张亚辉,赵岩.虚拟激励法在国内外工程界的应用回顾与展望[J]. 应用数学和力学,2017,38(1):1-32.
Concise closed-form solution of vibration response spectral moment of vehicle system under road irregularity excitation
LI Chuangdi, LI Yuxiang, GE Xinguang*
(School of Civil Engineering and Architecture, Guangxi University of Science and Technology,
Liuzhou 545006, China)
Abstract: Aiming at the problem that there is no closed-form solution for the random vibration response of vehicle system under the excitation of road roughness, a concise closed-form solution is proposed. Pavement irregularity is often regarded as a stationary stochastic process with zero mean value in engineering. In this paper, the complex mode method and virtual excitation method are used to orthogonalize the response power spectrum of vehicle system based on spectrum excitation of uneven pavement. The simple closed-form solutions of variance of random vibration response, 0-2 order spectral moment and absolute acceleration variance of vehicle system are obtained. The vibration of a kind of vehicle system is analyzed by using this method and compared with the virtual excitation method. The results show that the closed-form solution of variance and spectral moment obtained by this method is correct.
Key words: road roughness; spectral moment; concise closed-form solution; quadratic orthogonalization of power spectrum
