欠驱动AUV水平面动力定位控制方法研究
2021-07-14 23:37唐文政
数字海洋与水下攻防 2021年3期
唐文政,胡 测,梁 镜
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
随着AUV应用领域逐渐拓展,各种任务场景对其运动控制提出了更高要求。在执行抵近探测、悬停作业以及定点待命等任务时,往往需要 AUV具备自主靠近目标点并保持位置稳定的动力定位能力。国内外针对动力定位技术已开展一系列研究,并在水面船舶领域已得到较好解决[1-2]。出于对成本、质量以及推进效率等方面的考虑,AUV的运动执行机构往往被配置为欠驱动式,但是仅通过较少输入实现六自由度运动控制,在获得诸多优势的同时也增加了动力定位控制器的设计难度[3]。
对于AUV动力定位问题,文献[4]设计了滑模控制器并引入波浪扰动预测,实现轨迹跟踪控制与定点控制,并通过仿真进行验证;文献[5]考虑了未知的海流干扰,提出了一种基于反演技术的自适应变结构控制方法;文献[6]将环境最优动力定位控制(WOPC,Weather Optimal Positioning Control)的概念应用到全驱动自主水下机器人,基于神经网络自适应反演法设计了动力定位控制器;文献[7]提出了一种基于 Lyapunov 的模型预测控制方法,结合推力的优化策略进行动力定位控制;文献[8]针对全驱动 AUV近水面运动中自身惯量小且环境扰动敏感的问题,提出了一种动力定位控制方法。
以上控制方法大多基于复杂的非线性控制方法,且有些仅针对全驱动配置,难以有效应用到欠驱动AUV的工程实践中。因此,本文以自研AUV平台为研究对象,考虑其欠驱动特性与任务内容,基于线性控制提出一种动力定位控制方法,以实现自主抵近目标点并在其附近小范围区域保持水平位置稳定的控制效果,并结合试验数据证明该控制方法的有效性。
1 AUV平台运动执行机构配置
作为本文研究对象的AUV平台,其运动执行机构包括2个垂直推进器、2个水平推进器以及1组水平舵。其中:垂直推进器位于载体重心附近沿中轴线左右分布,提供垂向推力进行低速运动下深度控制;水平推进器位于载体中后段沿中轴线左右分布,提供纵向推力与转艏力矩进行纵向速度、纵向位置以及航向的控制,其中转艏力矩通过左右推进器转速差产生;1组水平舵位于水平推进器后,提供俯仰力矩进行高速运动下深度/俯仰控制。
该平台缺少侧向推进器提供侧移作用力;在低速状态下,其水平舵效率大幅降低,垂直推进器采用左右分布形式,基本不具备俯仰作用力矩;而高速状态下,其垂直推进器效率大幅降低,基本不具备垂向作用力。根据以上运动执行机构配置的分析,可判断该AUV平台属于欠驱动系统。
2 动力定位控制
在完成抵近探测、悬停作业以及定点待命等任务内容的过程中,往往需要AUV平台能够沿着预设路径自主抵近目标点,并最终在该点附近小范围区域保持位置稳定。考虑上述任务场景需求,设计动力定位控制分为路径跟踪与区域镇定2个阶段。
以任务目标点为圆心,在指定半径范围内设置为抵近区域,该区域边界作为路径跟踪与区域镇定2个控制阶段的分界线。其内部进一步设置较小半径范围内为定位区域,AUV最终将在该区域内保持位置实现悬停,如图1所示。按照时间顺序,启动任务后 AUV首先进入路径跟踪阶段,沿预设路径向目标点快速靠近;进入抵近区域后 AUV切换到区域镇定阶段,降低转速进一步抵近目标点,进入定位区域后保持水平位置稳定,若检测受到干扰偏离定位区域则自主返回,从而实现从起始点出发沿预设路径抵达目标点并保持位置的动力定位控制。

图1 动力定位控制示意图Fig. 1 Schematic diagram of dynamic positioning control
2.1 路径跟踪阶段
在路径跟踪阶段,控制器根据预设路径与实时导航信息,计算水平推进器转速指令值,发送至执行机构产生纵向推力与转艏力矩,控制AUV沿着预设路径进入抵近区域。预设路径通常为一系列路径点构成的分段直线,因此具体方法采用路径点跟踪控制。路径起始点与载体当前点的水平面位置坐标在WGS-84坐标系下,转换到ENU坐标系为

式中:(lo n, lat)为转换点经纬度坐标;(lo n0, lat0)为基准点经纬度坐标;R为地球基准椭球体长半径。
在工程应用中,实际平台往往具有一定程度的左右结构以及推力不对称性,并且欠驱动AUV无法在侧流干扰时通过侧向推力直接平衡干扰力,从而对路径点跟踪控制精度产生影响。因此,在常规的“视线法”制导方式基础上,将路径偏移量引入控制回路,如图2所示。

图2 路径跟踪控制示意图Fig. 2 Schematic diagram of path tracking control
式中:nL与nR分别为左右推进器转速指令值;n0为该航段设置的基础转速值。
2.2 区域镇定阶段
鉴于研究对象的欠驱动特性,区域镇定阶段需结合纵向位置控制与航向控制实现水平位置控制。根据式(8)的运动执行机构动力分配,水平推进器转速指令值由基础转速值与转速增量值 2部分构成,区域镇定阶段的基础转速值为

式中:keP为纵向位置控制系数;d为纵向位置偏差。
航向控制以视线角作为目标航向角,可根据式(2)得出,再计算转速增量值为

式中, kPφ2与 kDφ2为航向控制系数。
AUV抵达定位区域后进入悬停状态,根据导航信息监视位置偏差,通过运动执行机构保持水平位置,其中位置控制偏差为

3 实验结果分析
3.1 仿真实验
对于缺乏侧向机动能力的欠驱动AUV平台,区域镇定阶段的水平位置控制是整个动力定位过程的关键,因此首先在MATLAB环境下进行水平位置控制仿真实验。ENU坐标系下,取目标点为基准点(0,0),设置航行器初始航速与航向为0,初始位置为(-3 0,-3 0),仿真时间为1 000 s,定位区域为以目标点为圆心的2 m半径内区域。
仿真试验效果图如图3-4所示,航行器启动后逐渐调整航向靠近目标点,首次抵达后由于惯性出现小量超调,通过调整逐渐稳定在定位区域内,位置偏差小于2 m。

图3 仿真实验航行轨迹图Fig. 3 Trajectory graph of simulation
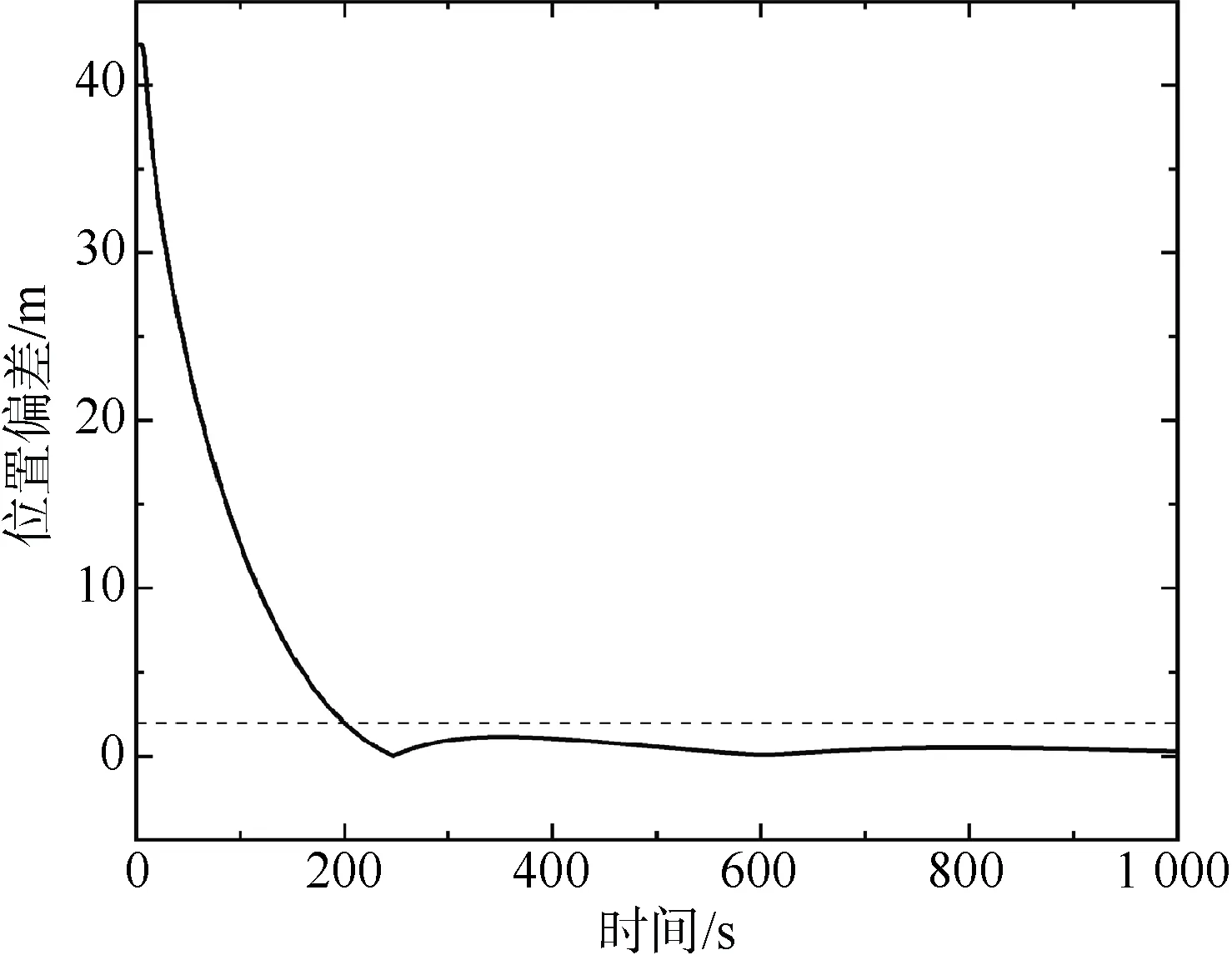
图4 仿真实验位置偏差曲线图Fig. 4 Position deviation graph of simulation test
3.2 现场实验
采用自研欠驱动AUV平台,通过湖上实验对整个动力定位控制流程进行验证。设置目标点附近2 m半径内区域为定位区域,在距离其150 m处选取起始点,预设航路包含长度分别约60 m与100 m两个直线航段。
整个动力定位过程持续 300 s,AUV航行轨迹与推进器转速如图 5所示,启动任务后航行器首先进入路径跟踪阶段,沿预设航路靠近目标点,在138 s进入抵近区域后切换为区域镇定阶段,以较低转速进一步靠近目标点,最终稳定在定位区域。
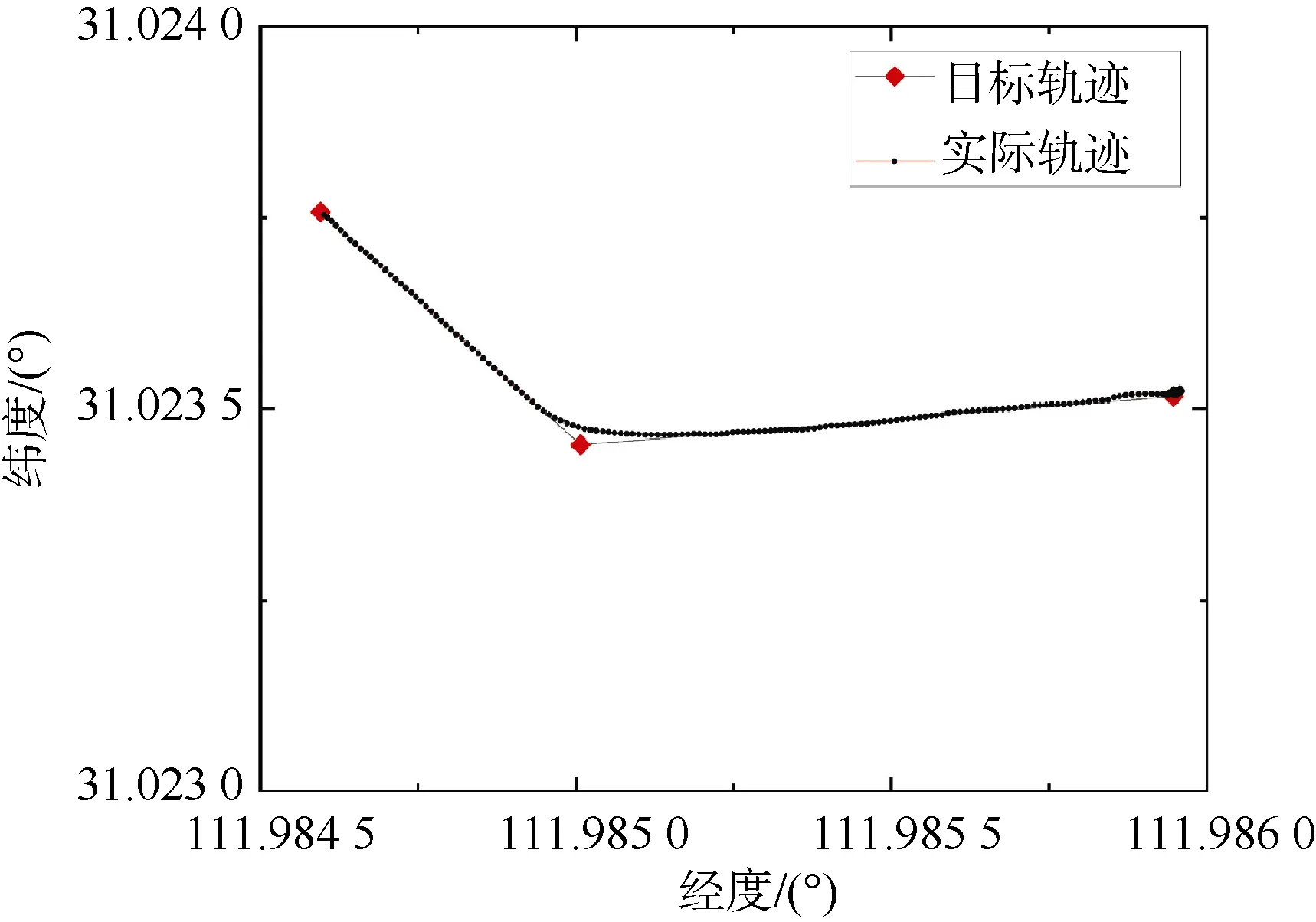
图5 动力定位实验航行轨迹图Fig. 5 Trajectory graph of dynamic positioning test
在路径跟踪阶段中,AUV基础转速值设置为800 r/min,在41 s抵达中转点的有效判定区域,切换至第2航段开始转弯,进入抵近区域后结束路径点跟踪控制,路径偏移量在1 m内,如图6所示。
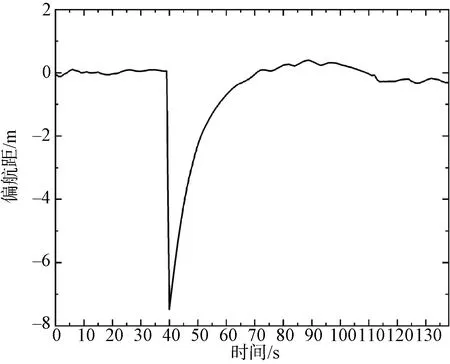
图6 路径跟踪阶段偏航距曲线图Fig. 6 Drift distance graph in path tracking positioning test
随后AUV进入持续162 s的区域镇定阶段,逐渐低速抵近目标点,10 s后首次进入定位区域并继续调整,保持水平位置偏差在 2 m内。以目标点为基准点(0,0),阶段切换时刻为时间轴起点,该阶段航行轨迹与位置偏差分别如图7-8所示。
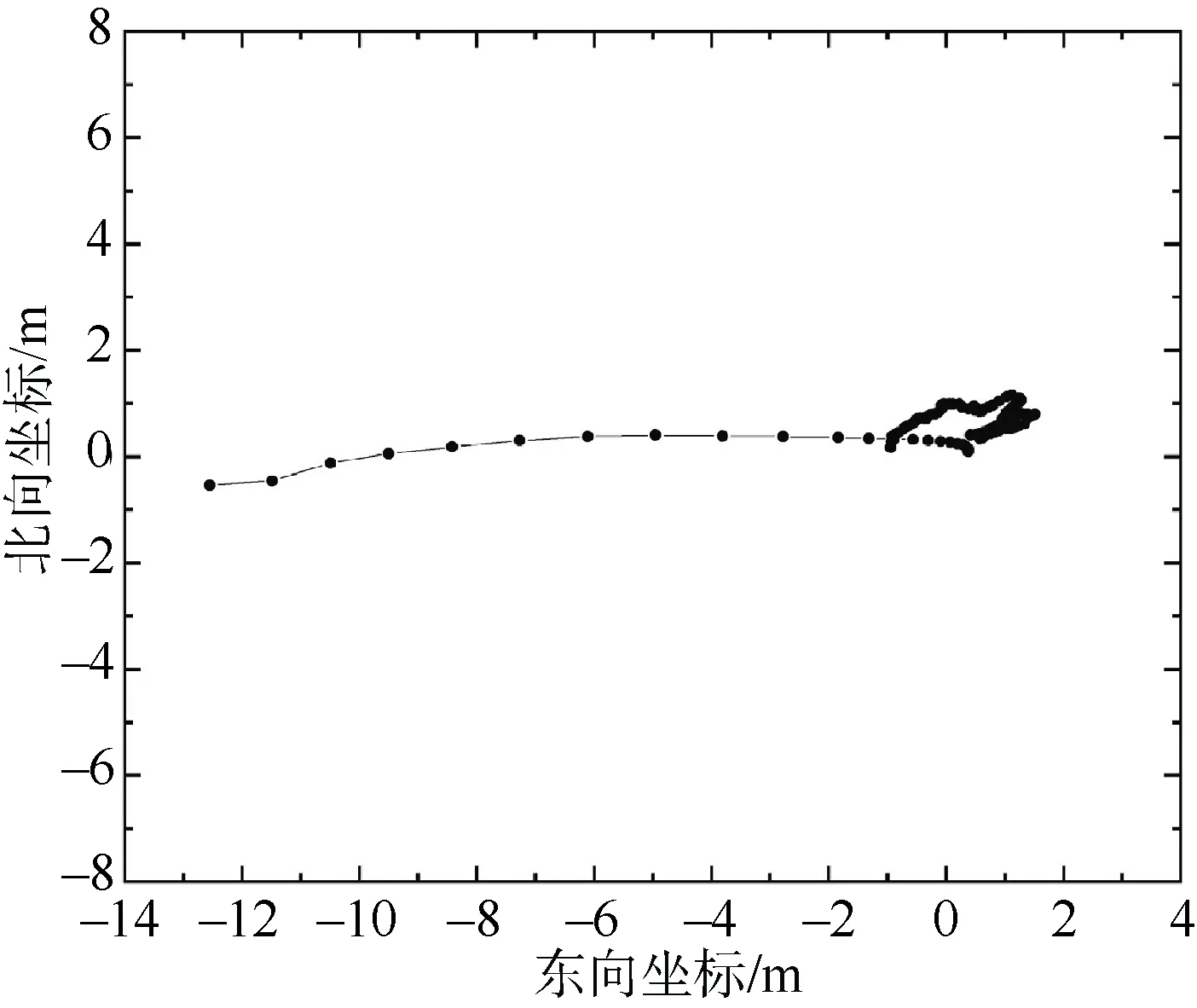
图7 区域镇定阶段航行轨迹图Fig. 7 Trajectory graph in zone stabilization

图8 区域镇定阶段位置偏差曲线图Fig. 8 Position deviation graph in zone stabilization
为验证区域镇定阶段AUV具备在干扰后的水平位置恢复能力,对航行器施加外部作用使位置偏离,该过程轨迹与推进器转速如图9。在32 s时位置误差达到6.1 m,此时解除干扰,航行器逐渐返回定位区域,由于惯性出现小幅度超调,经过调整后位置偏差重新控制在2 m内,如图10所示。
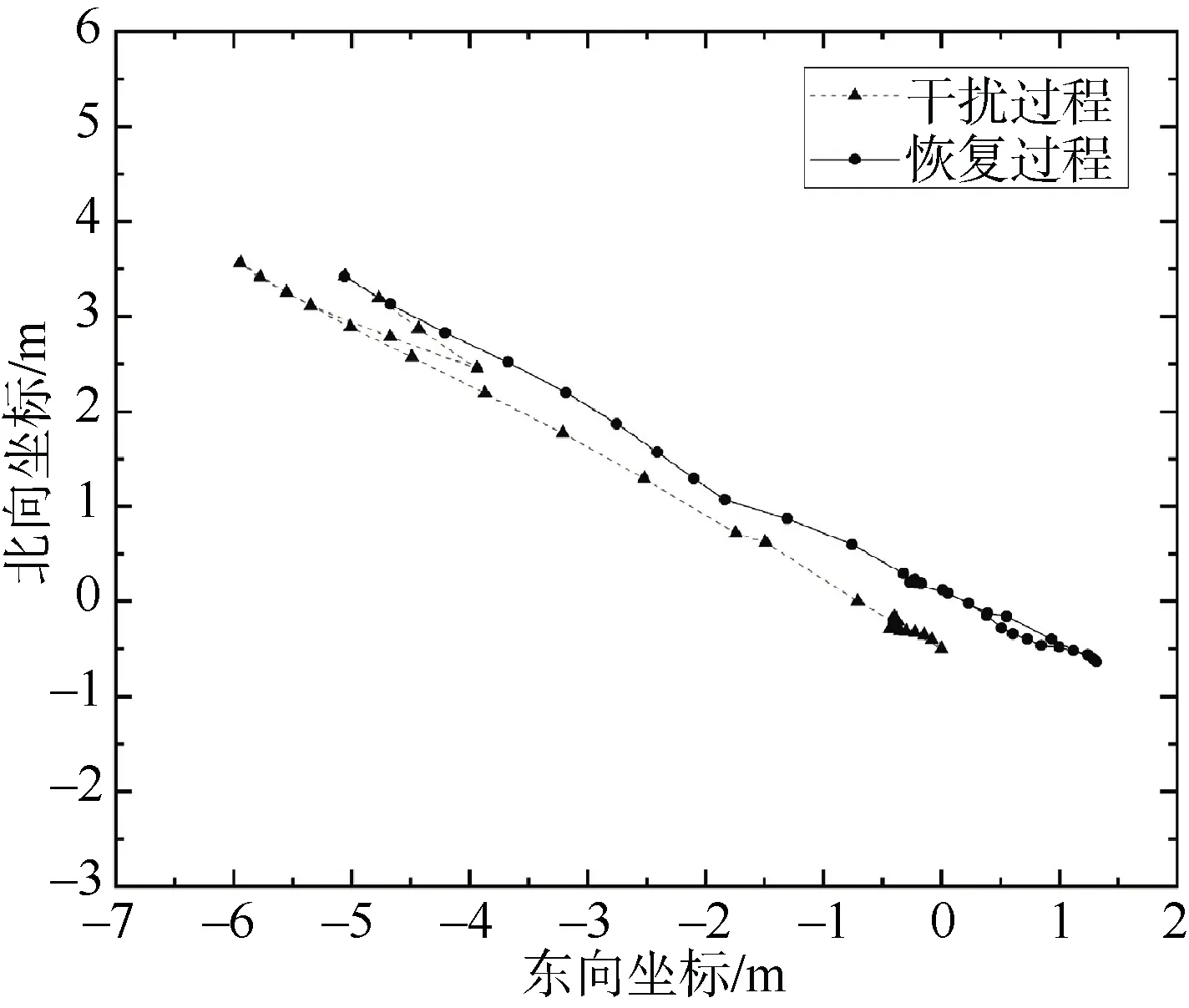
图9 外力干扰下航行轨迹图Fig. 9 Trajectory graph under external force disturbance
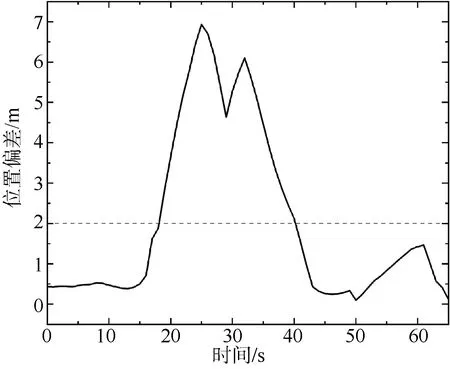
图10 外力干扰下位置偏差曲线图Fig. 10 Position deviation graph under external force disturbance
4 结束语
本文以AUV为研究对象,从实际工程应用角度出发,结合常规任务场景对动力定位功能的需求,针对欠驱动式运动执行机构配置,基于线性控制提出一种水平面动力定位控制方法。
根据作业流程,设置路径跟踪与区域镇定2个控制阶段;针对预设路径的常用设置方式选择路径点跟踪控制方法,在“视线法”控制回路中引入路径偏移量,以降低加工误差与环境干扰等带来的路径控制偏差;结合纵向位置控制与航向控制,进行无侧向推力的水平面位置控制。
最终通过仿真与现场试验,证明AUV能够沿预设路径自主抵近目标点,并保持在该点附近2 m范围内区域,从而验证该动力定位控制方法的可行性,为欠驱动AUV顺利完成抵近探测、悬停作业与定点待命等任务奠定基础。
猜你喜欢
商界评论(2022年1期)2022-04-13
甘肃教育(2021年12期)2021-11-02
舰船科学技术(2021年12期)2021-03-29
课堂内外(小学版)(2020年5期)2020-07-20
数学大王·趣味逻辑(2019年10期)2019-11-06
当代陕西(2018年12期)2018-08-04
草原(2018年2期)2018-03-02
中学课程辅导·教学研究(2017年28期)2018-02-03
中学数学杂志(初中版)(2017年2期)2017-05-09
科技创新导报(2016年31期)2017-03-30