一种无人飞行器测控系统高动态目标角捕获方法
2021-07-14 00:14刘国栋郑淑梅孙志刚
无线电工程 2021年7期
赵 云,刘国栋,陈 蓓,郑淑梅,孙志刚
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
为确保飞行器安全,无人飞行器测控系统采用高频段完成遥控、遥测和宽带数据传输,采用低频段备份应急链路完成遥控、遥测传输。在高动态无人飞行器角速度大、角加速度大和飞行速度超高的情况下,在天线主波束半功率内跟踪到的目标信号时间很短。战时还存在导航信息失效、数引不能应用的可能,实现无人高动态飞行器测控系统设计的关键是既能自主快速,又能准确、有效地完成目标的角引导与捕获。
传统航天测控采取宽波束引导天线对信标信号粗捕获,再转高精度天线跟踪。随着使用频率提高,存在宽波束和高增益的矛盾无法实现目标的捕获跟踪,对此,吴海洲等[1]提出降低单个引导天线波束角度,增加引导天线数目扩展空域捕获范围的方法解决高动态目标捕获和跟踪。李敏剑等[2]针对Ka高频段提出一种在主馈源周围增加同频同波束角偏馈的多波束馈源阵列天线方案来展宽频段波束范围,解决捕获问题,但偏馈阵元数目多,设备复杂。
本文提出的高动态目标捕获跟踪方法的创新是在工程项目中基于双链测控体制,提出异频双跟踪体制捕获引导跟踪方法,在目标不确定的空域内,低频段宽波束定向天线对准目标空域,采用相位干涉仪跟踪体制在期望位置检测目标,确定目标位置后,计算目标偏离中心角度,通过伺服系统转动天线,使高频段窄波束也对准目标,完成目标单脉冲体制的精确跟踪。该方法巧妙解决了波束宽度与接收增益间的矛盾,兼顾宽覆盖捕获视场和高增益窄波束接收性能,满足测控系统高动态目标捕获需求。同时,该方法直接接收低频段下行信号直接解调,较全向天线解调信噪比、抗多径和抗干扰性能好。实际结果也验证了伺服环路角捕获性能和该方法的有效性。
1 角捕获方案设计
基于异频双链路天线的高动态目标快速角捕获方法,从无人机测控体系已有条件出发、不显著增加设备复杂性、同时满足高动态需求。系统硬件环境主要由天伺馈分系统、接收信道和数字终端分系统等组成。
在有限的高频段定向天线口径的限制下,采取将低频段定向天线置于高频段定向天线的周围,组成一个单平面干涉仪测角系统,引导天线采用宽带振子天线形式。引导天线波束很宽,其基线长度保证测角精度[3]只要在高频段单脉冲单通道半波束宽度内,就可以保证窄波束天线完成跟踪。
天伺馈分系统配备构想如下:4喇叭馈源和抛物面主天线0.9°波束宽度、相位干涉仪引导天线11°波束宽度(跟踪精度6 mrad)、座架结构和天线控制单元(ACU)、天线驱动单元(ADU)等部分,其原理组成框图如图1所示。接收信道由单脉冲单通道跟踪、干涉仪角度捕获接收信道等组成。数字终端分系统完成引导通道、主通道信号检测和能量检测、目标位置估计[4]和角度引导误差输出等功能。

图1 高精度宽波束引导跟踪接收机架构
高动态目标信号角度捕获的信号流程和工作步骤如下:
① 定向天线获得中心引导数据的引导,指向某个特定空域[5];
② 干涉仪天线完成微弱高动态信号检测,检测到信号后立即引导数字信号处理单元对波束位置进行预计算处理,输出目标差值、自动增益控制(AGC)电压和锁定指示等传输至伺服ACU;
③ ACU做出响应,控制天线伺服设备闭环和跟踪,收敛过程耗时约200 ms,就可以引导主波束完成微弱高动态信号检测,30 ms内稳定跟踪;
④ 如果主波束伺服闭环跟踪失败,引导天线继续在预定位置捕获[5];
⑤ 主波束成功引导完成自跟踪且状态稳定,那么捕获过程完成,立刻转入自跟踪功能,进行系统测控[5]。
2 高动态低信噪比下信号检测
运动速度极快的目标,在实现角捕获过程中,系统实现对目标的快速检测要求是在ms量级上完成角捕获。为了实现目标的高概率快速捕获,要求信号处理设备在空间波束覆盖范围内,能够进行低信噪比下检测高动态信号。
常采用能量检测的方法,对具有一定带宽的信号进行检测。这种方法实现简单,但仅适用于检测一定信噪比下的信号能量。由于不能将带宽内信号能量进行有效汇聚,在低信噪比状况下能量检测法性能恶化,甚至不能有效检测信号。
利用循环谱分析方法可对遥测信号(窄带)、数传(宽带)信号等进行低信噪比检测。根据BPSK、QPSK等信号的循环平稳性质,对合作信号通过谱相关、自适应滤波及对消处理,在低信噪比的条件下多次累加,再对信号进行能量检测和判决。为了获取较好的抗干扰能力,可以利用循环谱密度函数实现时变噪声背景下、严重被干扰信号的检测,比常规的谱分析方法[6]检测性能有很大提升。
由于高动态目标存在较大的多普勒频率,其信号多普勒频率范围为±720 kHz,多普勒频率一次变化率为73 kHz/s。多普勒频移在频域上表现为调制信号的频谱整体的向左或者向右搬移,不会引起能量值的改变。基于FFT的能量检测方法只需要最大的能量值即可,因此该方法对多普勒频移具有一定的适应性[7]。累计256次进行一次能量检测时间为0.586 ms,其多普勒频移变化为42.8 Hz,远小于频谱分辨率,因此多普勒一次变化率对信号检测没有影响。
由文献[8]可知,QPSK信号的循环谱密度为:

对MPSK 信号的检测可视为二元假设检验问题:
H0:x(t)=n(t),
H1:x(t)=s(t)+n(t),
式中,s(t),n(t)分别代表信号与噪声。由于噪声的循环不平稳特性,其循环谱密度只在α=0处为峰值,而对于所有的QPSK 信号,在f=±fc的α截面上,α=±Tc处均为峰值[8]。由于噪声的非记忆性以及算法本身存在的固有误差,造成循环谱密度估计的数字实现时,会在频率轴以外形成噪声峰值,所以在对QPSK 信号的存在与否进行检测的时候,可对观测数据的循环谱密度进行计算,在频率和循环频率的平面上进行谱峰搜索,形成统计量进行检测[9]。
门限的选取将直接影响信号检测判决的性能,门限值过低将会造成虚警概率增高,门限选择过高会增大漏警概率。通常采用的方法是先设定一个满足要求的捕获虚警概率Pfα,然后利用Pfα计算出门限值VT。当输入信号中只有噪声时,输出检测峰值V服从χ2分布[10],因此门限值VT对应的Pfα为:
Pfa=Fn(VT)=

式中,k=2LM。可以利用上式求得检测门限:
[VT:Fn(VT/V)=Pfa]。
在以下不同累加次数下的虚警概率和检测概率分析中,直接利用虚警概率计算公式来计算检测虚警概率值。
当输入信号信噪比为-5 dB,对信号进行相关变换[11]和求能量,然后进行非相参积累,累加的段数分别为100,150,200,250,300。利用其虚警概率计算公式,仿真对应的检测-虚警概率关系可知,随着累加段数的增加,检测概率和虚警概率得到明显的改善,系统检测性能提高。当累加次数达到250时,在信号检测虚警概率低于1×10-6条件下,信号检测概率大于95%。因此,在低信噪比条件下通过增加累加次数能够实现信号的检测。
在积累次数为256,信噪比分别为-7,-6,-5和-4 dB条件下,仿真对应的检测-虚警概率关系曲线如图2所示。
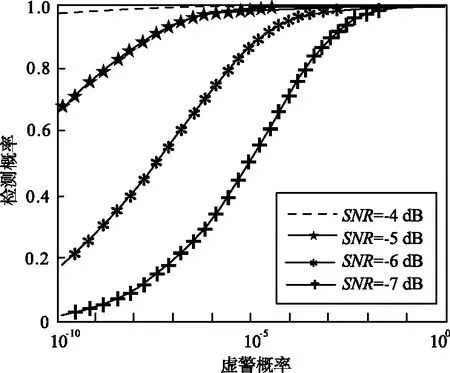
图2 不同信噪比检测概率-虚警概率曲线
由图2可以看出,在累加段数不变的条件下,随着输入信号信噪比的降低,在虚警概率低于10-6条件下,信号检测概率下降明显。同时可知,低信噪比的信号虚警-检测概率能够满足要求的条件下,高信噪比信号的固定门限检测也能够达到要求。
3 高动态目标捕获
传统的测控捕获跟踪手段是采用相同频段宽波束,对准特定空域,先进行角度粗捕获,再引导至窄波束进行同频段的精密跟踪。对于具有较大的速度和加速度的高动态目标效果较差[12]。可以采用共座小天线传统的引导捕获方法,如引导天线波束宽度为11°,则比0.9°精跟踪天线降低增益21 dB。采用异频双体制捕获引导跟踪技术,通过干涉仪3阵元天线,实现11°区域目标捕获,在保证天线波束增益的同时,兼顾空间捕获范围。通过仿真[13]计算得到伺服环路角捕获特性,可以检验高动态目标捕获跟踪[14]的性能,验证所提方法的有效性。以典型目标运动速度7.9 km/s,近端捷径为80 km,目标最大角速度约为5.6°/s,对不同目标角动态、不同波束宽度、不同跟踪精度情况下的引导天线进行了仿真。
天线的伺服环路利用如图3所示环路模型建模。其中,F(s)为一阶滤波器[15],KH为常数。直径3.7 m左右的天线,其结构谐振频率一般在7.6 Hz左右。一般选取伺服带宽为谐振频率的1/5~1/2,也就是1.5~3.5 Hz,以避开结构谐振峰值,保证系统稳定工作,同时得到较为快速的响应。
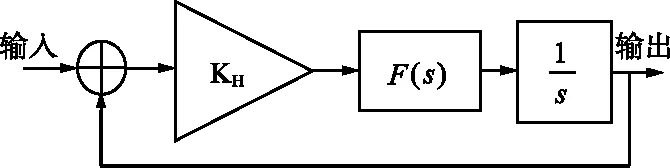
图3 天线伺服环路数学模型
(1) 不同目标角动态情况下角捕获过程
经过伺服环路优化后目标运动角速度达到6°/s时,目标驻留时间1.8 s,目标位置与天线指向之间的角度差不超过半个波束宽度(5.5°),天线不会丢失目标[4]。目标运动角速度达到7°/s时,目标位置与天线指向之间的角度差超过半个波束宽度(5.5°),天线将丢失目标[4]。不同目标角动态情况下角捕获过程如图4所示。

图4 不同目标动态情况下角捕获过程
(2) 不同动态情况下引导天线角捕获概率
设天线波束宽度为11°,分别对目标不同角速度、角误差精度的捕获概率清况进行蒙特卡罗仿真(1 000次)。
捕获概率如图5所示,角度标准差分别为0°,0.34°,0.45°,0.68°。在6°/s角速度以下,无误差情况下能达到很好的检测概率。当角度测量随机误差0.3°以下,波束覆盖范围为11°时,捕获概率能达到98%以上。
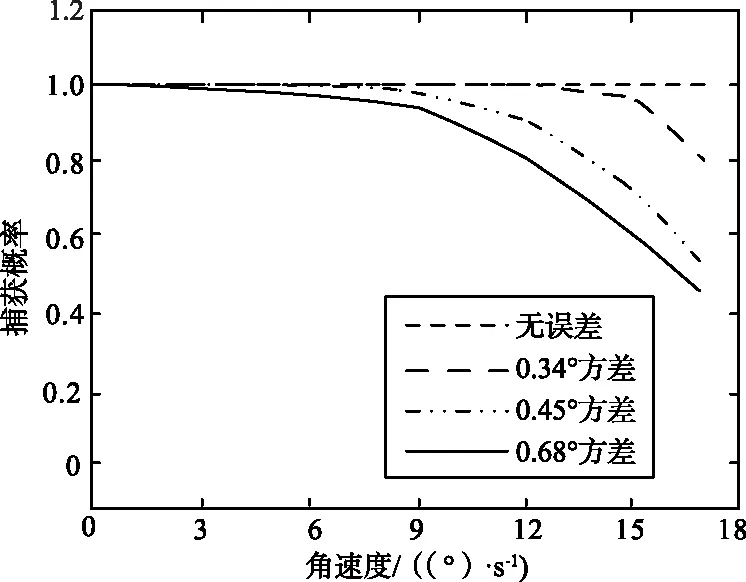
图5 角捕获概率与目标角速度、角误差精度之间的关系
(3) 引导天线捕获概率与引导天线波束宽度之间的关系
不同引导天线波束宽度情况下,经过蒙特卡罗仿真(1 000次),测角随机误差为0.34°情况下,得到其捕获概率,如图6所示。
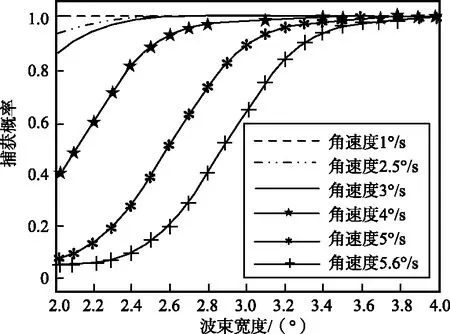
图6 角捕获概率与目标角速度、波束宽度之间的关系(输入角误差0.34°)
可见,对于角速度小于5°/s的目标,在波束宽度为11°时,捕获概率在95%以上,而对于角速度为5.6°/s的目标捕获概率在80%以上。若要提高高动态情况下的捕获概率,提高波束覆盖范围是最有效的办法[16]。将波束宽度提高至14°,可以有较好的捕获概率,一般可以达到99%左右。
4 结束语
测控系统对高动态目标的捕获跟踪,引导天线波束宽度与接收增益是一对矛盾,采用异频双跟踪体制高动态目标角捕获方法,针对PSK 信号的循环平稳特性,为了保持接收天线增益满足捕获信噪比要求,可以将循环谱分析器应用到低信噪比环境下的接收,还能提高捕获概率,满足高动态目标角捕获的需求。
猜你喜欢
电信科学(2022年11期)2022-12-08
兵工学报(2022年11期)2022-12-01
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
物联网技术(2019年9期)2019-11-06
物联网技术(2019年9期)2019-11-06
通信技术(2019年3期)2019-05-31
科技视界(2018年9期)2018-07-27
汽车文摘(2017年9期)2017-12-06
科学与财富(2017年24期)2017-09-06