深空探测网自动化运行管理研究
2021-07-14 00:14李大鹏章鹏飞刘仲博
无线电工程 2021年7期
柯 影,李大鹏,曹 灿,章鹏飞,刘仲博,杜 星
(中国人民解放军63769部队,陕西 西安 710043)
0 引言
经过十余年的发展,我国深空网已经初具规模,今后深空设备还将进一步扩展。由于深空任务的特殊性,其对测控设备的功能、使用模式与其他航天器任务有较大差别,使用地基测控网现有模式管理深空测控网,不能满足深空任务的测控需求,也无法满足深空设备的管理要求。另一方面,随着航天力量的不断发展,要求最大限度整合地基测控站、数据接收站、空间目标监视设备等各类地面站资源,按照各类资源互联互通、整合融合、协调发展的原则建设天地基资源管理中心。深空网作为地面资源的一类,也应纳入地面资源进行统一管理。
目前我国深空测控网信息化管理中存在诸多技术瓶颈,一方面深空测控网信息化管理水平较低,各专业域分散管理,缺乏必要的信息融合和集成,缺少各专业信息的互联互通,严重制约了深空网综合管理水平和综合测控能力建设;另一方面,深空网运行自动化水平不高,管理过程存在诸多人工参与环节,严重影响了深空网支持效率和响应速度。为解决深空测控网信息化管理中的技术建设瓶颈问题,迫切需要研究深空测控网自动化运行关键技术。本文针对目前深空测控网自动化运行中存在的不足,从接口控制文件入手,统筹任务中心与深空探测设备,研究深空设备自动化运行流程和深空测控设备自动化运行关键技术研究,提出一种可行的自动化运行方案并对其关键技术进行分析研究。
1 深空测控网
1.1 功能与特点
深空测控网是负责对深空航天器进行跟踪测量、遥测和遥控的专用地面测控网,其特点是配备有高精度大口径抛物面天线(或者高精度的天线阵列)、大功率发射机、高灵敏度接收系统以及高精度高稳定度的时间和频率系统,能够完成对深空航天器的测控任务[1]。
深空测控网的主要技术特点如下:① 使用大口径天线或者高精度的天线阵接收无线电信号;② 无线电信号路径传播时间长;③ 通常采用多种体制的跟踪测轨策略。
1.2 国外深空测控网
美国深空网规模庞大、设施完备,配备大口径抛物面天线、高灵敏度接收系统、信号处理中心和通信系统,可以对深空任务全天时不间断测控,测控技术成熟,任务成功率高,在深空探测领域处于绝对领先地位[2]。
美国深空测控网负责16副天线(直径为26~70 m)的测控调度,为美国航空航天局及其他机构的地球轨道航天器和深空探测器提供跟踪、导航和数据传输服务。自1958年成立至今,深空测控网已为150个任务提供服务,目前在持续4个月的调度计划中为大约20颗航天器分配测控资源。
欧空局(ESA)深空网从2000年开始建立,目前已建成3个深空站,将能够为行星际任务提供连续覆盖。ESA早期的深空任务依靠ESTRACK网及NASA深空站的支持,随着深空站在全球范围的建立,ESA将逐步摆脱对NASA深空网的依赖。
1.3 国内深空网建设情况
中国科学院已经建成了主要用于天文测量的VLBI网(CVN),借助VLBI网与航天测控网的联合,圆满完成了“嫦娥一号”“嫦娥二号”的测定轨任务。VLBI网是深空测轨系统的一个分系统,目前由上海25 m、北京50 m、昆明40 m和乌鲁木齐25 m的4台射电天文望远镜,以及上海数据处理中心组成,分辨率相当于口径为3 000多千米的巨大的综合望远镜[3]。
2 深空网运行流程
接口控制文件对深空测控设备工作计划和配置有关的运管类信息交换内容,包括设备使用申请、设备使用响应、干涉测量参数配置文件、设备工作参数配置文件等文件进行了规定,各执行单位的运行管理关系如图1所示。
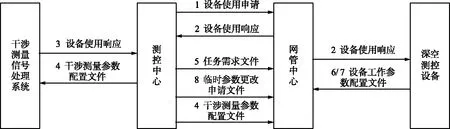
图1 计划类文件流程
在深空测控中,干涉测量中心作为运行主用的干涉测量信号处理系统。网管中心进行资源调度、远程监控和测控网管理[4]。
自动运行采用工作计划驱动模式,相比常规USB设备自动运行在工作计划格式、任务场景、任务流程等方面更加复杂[5],结合深空任务长弧段多目标的特点,满足任务中参数与状态切换的要求,并根据不同目标的上下行测控数传与VLBI的不同需求来动态配置任务场景与任务流程,深空自动运行与常规USB自动运行的异同如表1所示[6]。
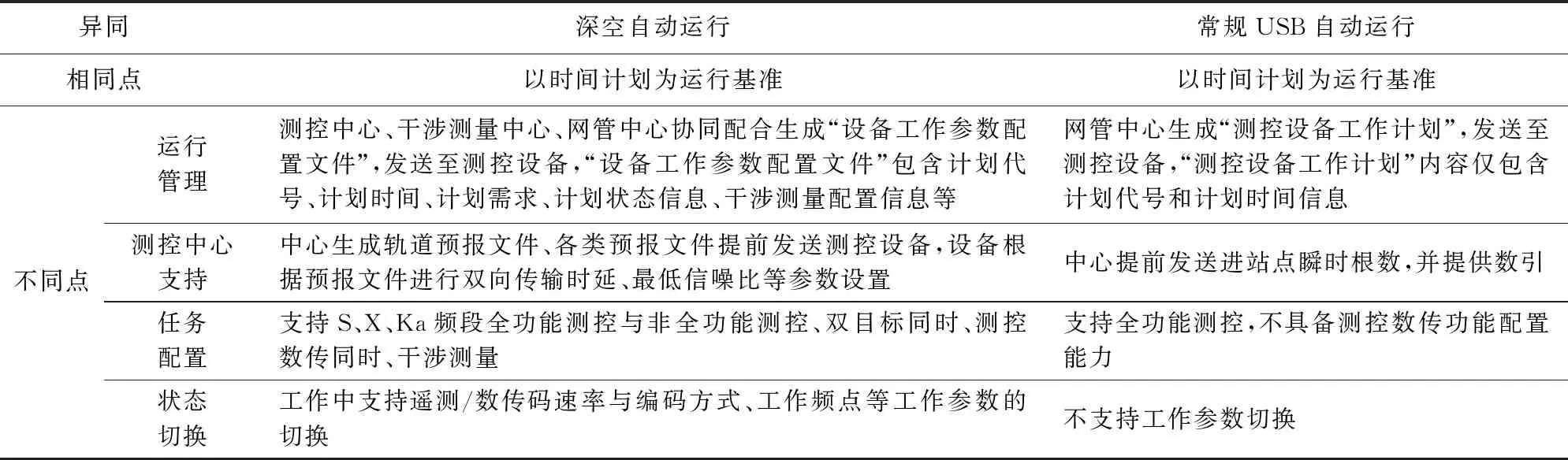
表1 深空自动运行与常规USB自动运行的异同
3 深空设备自动运行流程设计
3.1 深空任务自动运行流程设计
3.1.1 设备预热
设备预热不在自动运行的控制内,由人工完成。在设备预热已完成的情况下,才能正常执行自动运行。
设备使用时,首先需要加电,一般情况下,在任务前1 h系统加电预热。如果流程中要用到速调管,需提前15 min加辅电并液冷。时频设备处于常加电状态,不能断电。监控服务器和数据库服务器正常运行[7]。
由于低温接收机从常温到低温工作制冷时间较长(大约2 h),所以要比系统其他设备至少提前2 h开机。正常情况下,S低温接收组件温度达到12 K左右,X低温接收组件温度达到11 K左右,即可开始工作[8]。
3.1.2 计划解析
监控分系统读取最近的一个测控计划,判断当前时间是否已到各个典型时间点,运行相应场景中对应的系统流程下典型时间点的子流程[9]如图2所示。

图2 测控计划运行流程
① 系统监控收到网管中心发送“设备工作参数配置文件”,解析计划文件。
② 解析“设备工作参数”生成工作计划、流程调度和参数配置文件。
③ 删除当前创建的所有计划和参数更改文件,当前正在执行的计划,既不删除,也不更改(与传统站处理方式略不同)。
④ 工作计划文件包含参数:任务准备时间、任务开始时间、任务结束时间。文件存在于监控服务器本地。
⑤ 流程调度和参数配置文件包含参数:开上行载波时间、关上行载波时间、状态参数生效时间、遥测参数配置生效开始时间、数传参数配置生效开始时间、上行状态所有参数、遥测状态参数、数传状态参数。下行数据接收开始时间、下行数据接收结束时间。文件存在于监控服务器本地。
⑥ 上行状态参数(除状态参数生效时间)、遥测状态所有参数(除遥测参数配置生效开始时间)、数传状态所有参数(除数传参数配置生效开始时间),这些参数监控以时间符合驱动,根据各自生效时间,用单元控制命令方式下发给基带进行参数设置。其中部分参数,如测速方式、测速体制等,需要与数传或遥测状态里的“是否与上行相关”联动,会关联下发系统参数控制命令。
⑦ 上行点频有关的加扰控制、系统捕获方式、多普勒预置方式、是否频率扫描、下行点频有关的测速体制、是否多普勒预报、多普勒预报方式、地面传输方式以及下行点频相关的参数连带本地参数宏中所有参数及与点频信息相关的配置宏(设备本地配置的)最终合为一个任务宏。
3.1.3 自动化运行流程
① 服务端启动自动化。
② 检索工作计划,取当前最近的任务开始时间的计划作为驱动自动化运行的工作计划。
③ 加载工作计划,等待任务准备开始时间。
④ 到达任务准备时间后,读取流程调度和参数配置文件,根据计划中的目标信息(上行点频、下行点频和任务参数),读取本地参数宏,并将设备工作参数文件中规定的任务参数填充到读取的本地参数宏中;再根据点频信息读取配置宏,最终生成任务宏。
⑤ 下发任务宏,宏执行完成后根据任务要求控制DTE/SLE加载任务。
⑥ 在每一个自动化开启时,对设备进行校零,校零时控制系统设置偏馈校零环路,控制发送上行功率,待基带信号锁定后,控制基带完成距离校零。
⑦ 设置系统为任务环路,标校设备去电。
⑧ 校零完成后,控制ACU为自动运行方式,加载星历文件,并控制ACU任务开始(转程引)。
⑨ 控制基带加载预置文件(DPU、TT&C、DPD、DDT、DPD、OEM)。
⑩ 到达任务开始时间,控制SLE任务开始。
如果当前参数不是当前点频,则下发上行点频参数(火星阶段未实现)上功率,如果上行功能(当前上行状态中确定)中有测距,启动深空系统捕获;否则启动双捕;如果上行功能中有遥控,则捕获完成后遥控加调,遥控工作期开始;捕获流程见。
如果当前参数不是当前点频,则下发下行点频和测距状态参数(火星阶段未实现);
根据下行功能是否含测距(当前遥测或数传状态中,是否与上行相干),决定是否外测存盘送数;根据下行功能(当前遥测或数传状态中确定),决定是否遥测或数传送数。
根据当前任务代号和点频,判断下发至哪一个基带设备;如果上行状态中测距加调,下发上行状态中的参数;修改上行功能,加上测距;如果初始状态是去调,则启动深空系统捕获流程;
如果上行状态中测距去调,下发上行状态中的参数;修改上行功能,去掉测距,并不再发起重捕。
根据当前任务代号和点频,判断下发至哪一个基带设备;如果是遥测相干转遥测相干,下发遥测状态参数;如果是遥测相干转遥测非相干,下发遥测状态参数,控制基带为测控单向测速;【双向光行时前应有上行状态切换,控制上行功能去掉测距】;
如果是遥测非相干转遥测相干,下发遥测状态参数,控制基带为测控双向测速;【双向光行时前应有上行状态切换,如果上行状态中有测距加调,则启动深空系统捕获流程】;
如果是遥测非相干转遥测非相干,下发遥测状态参数;
切换下行功能为遥测,根据上行功能决定下行功能是否含测距,根据是否与上行相关决定是否双向或单向测速。
根据当前任务代号和点频,判断下发至哪一个基带设备;
下发数传状态参数,不考虑相干的情况;切换下行功能为数传。
根据当前任务代号和点频,判断下发至哪一个基带设备;
如果非相干转遥测相干,下发遥测状态参数,控制基带为测控双向测速;【双向光行时前应有上行状态切换,如果上行状态中有测距加调,则启动深空系统捕获流程】;切换下行功能,将数传去掉(数传送数保持);
如果非相干转遥测非相干,下发遥测状态参数,控制基带为测控单向测速;【双向光行时前应有上行状态切换,控制上行功能去掉测距】。
根据当前任务代号和点频,判断下发至哪一个基带设备;
如果遥测非相干转数传非相干,下发数传状态参数,控制基带为数传单向测速【双向光行时前应有上行状态切换,控制上行功能去掉测距】;
如果遥测相干转数传非相干,下发数传状态参数,控制基带为数传单向测速;
切换下行功能,将遥测去掉(遥测送数保持)。
深空多普勒预置捕获流程:控制基带输出载波,控制发送功率,则保持功率稳定并发出5 s后且在预置持续时间之后,如果上行功能含测距,开始距捕;如果上行功能含遥控,则遥控加调;
深空扫描捕获流程:控制基带输出载波,去调副载波,控制发送功率,保持功率稳定并发出5 s后,控制基带指定圈数扫描,等待随扫或中心星锁点亮时回零,双捕完成后如果上行功能含遥控,则遥控加调;如果上行功能含测距,则开始距捕。
3.2 VLBI干涉测量自动运行设计
3.2.1 设备预热
设备预热不在自动运行的控制内,由人工完成。设备预热后,需保证监控分系统、干涉测量信道开机,大气参数测量设备运行(时频24 h开机不断电,需要检查工作是否正常,共视数据是否实时记录)[11]。
3.2.2 自动运行流程
VLBI干涉测量自动化运行流程如图3所示。
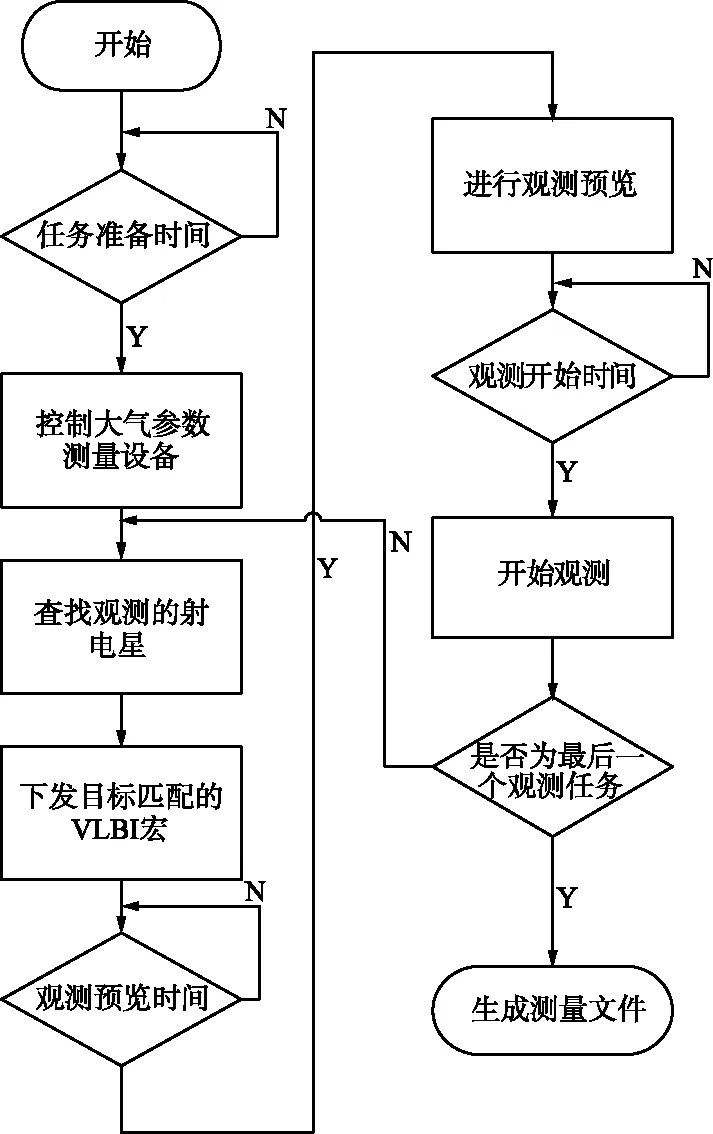
图3 VLBI干涉测量自动化运行流程
① 任务准备开始时间到,系统监控向DTE发送加载任务命令,下发匹配的场景和参数宏,天伺馈开始测角送数。
② 控制大气参数测量设备的天线工作方式为数引,此时小天线开始随动。
③ 找到第一个观测的射电星目标代号。如果观测目标为航天器,则目标代号为“航天器”;如果观测目标为射电星,则目标代号为“射电星”(VSI模式就是射电星,VSR模式要填具体的射电星名称,例如0311+461)。
④ 下发第1个观测目标匹配的VLBI宏。
⑤ 等待观测预览时间到,向基带转换与记录设备发送预览开始命令。预览若干秒后,发送停止预览命令。如果参数中模拟和子带AGC增益为自动,将当前AGC增益记录并保存,停止预览时将AGC增益改为手动,将预览时自动调整的AGC重新设置到基带转换与记录设备中。如果参数中模拟和子带AGC增益为手动,则不须做调整[12]。
⑥ 等待观测开始时间到,向基带转换与记录设备发送记录开始命令。
⑦ 等待观测结束时间到,向天伺馈发送任务结束。
⑧ 等待观测结束时间到,向基带转换与记录设备发送任务结束命令。
⑨ 继续查找下一个观测目标,向天线发送任务开始命令,天线开始切换到下一个观测目标,重复以上步骤。
⑩ 直到最后一个观测任务结束,开始生成环境参数测量数据和共视文件并通过FTP发送至任务中心。
4 深空测控设备自动化运行关键技术研究
4.1 伺馈分系统角度显示
目前天伺馈分系统轴角编码单元采用增量式,需要开机后进行转动才能显示出角度数据,同时人工判断角度数据的正确性。经分析确认,增量式轴角编码是由光栅尺式光电轴角编码器制式决定的,目前不具备修改为绝对量式编码的条件。因此在自动运行设计时需要增加天线转动,判断角度数据正确性的自动流程[13]。
4.2 速调管高功放自动开关机
速调管功放开机需要遵循加辅电、加高压、上功率等一系列流程,关机采用相反流程,目前这些流程由人工操作完成。速调管高功放开关机已进行了自动运行流程设计。
4.3 自动运行与人工运行切换
深空任务的特点是弧段长,一个弧段内有状态切换。因此在自动运行过程中,如需人工操作,可切换为人工,人工操作完之后再转为自动运行。目前自动运行还不具备人工运行与自动运行的中断后恢复的能力,需在设计中能够具备自动运行与人工运行切换的能力。
5 结束语
为了适应后续多种类型深空探测任务,以及地面资源融合的新要求,深空测控网的体系结构、设备管理方式、数据接口规范等都需进行不断深化改进,这是一个全新的、复杂的测控重任。本文研究从深空测控的需求出发,结合我国深空测控网管理的现状,围绕测控资源融合、运行管理自动化等建设需求,深入开展深空测控网资源调度模式和接口、深空测控任务状态集中建立与深空测控设备集中监控等技术研究工作,提出的深空设备自动化运行流程,解决了深空测控任务比常规USB设备自动运行在工作计划格式、任务场景、任务流程等方面差异问题;解决当前操作员在本地手工配置耗费时间较长且易出错的问题,为进一步提高深空测控网信息化程度和运行效率,和未来深空测控网的高效管理奠定基础。
猜你喜欢
土木建筑与环境工程(2022年4期)2022-05-14
计算机测量与控制(2021年8期)2021-08-23
农业工程(2021年6期)2021-07-29
兰州理工大学学报(2021年1期)2021-03-09
中国电子报(2019年55期)2019-10-24
通信产业报(2019年26期)2019-08-30
居业(2019年3期)2019-06-07
载人航天(2019年1期)2019-03-07
实验流体力学(2018年6期)2018-02-13
航空模型(2016年5期)2016-07-25