基于包络锁相的AMCW高精度测距算法
2021-07-14 00:14闫佳兴
无线电工程 2021年7期
闫佳兴,郑 霖,杨 超
(1.桂林电子科技大学 信息与通信学院,广西 桂林 541004;2.广西无线宽带通信和信号处理重点实验室,广西 桂林 541004)
0 引言
随着5G物联网应用的广泛开展,很多应用领域对高精度位置传感的需求日益迫切[1]。例如,华为最新发布的高分辨成像雷达,大幅提升了对目标的感知能力;对驾驶员进行非接触生命体征监测,可防止由于急性健康危害引起的事故。其中最关键的部分就是雷达传感器的设计,要求该传感器具有高精度测距及高分辨率成像的功能,以满足安全驾驶的需求。
目前高精度测距及成像方法按照距离信息的提取方式可分为2大类:
第1类是测量时间的方法。例如,大带宽信号(Linearly Frequency Modulated)通过脉压后获得较窄的脉冲[2-4],通过测量窄脉冲的时延来获得目标距离信息。由于信号携带大的带宽,使得系统具有很高的距离分辨率,且在解扩过程中产生扩频增益,使得系统的抗干扰性能变强。但是大带宽的信号不仅会带来高成本和复杂的射频前端,且在精度的进一步提高上会受到带宽的限制。
第2类是测量相位的方法。例如,干涉雷达[5-6]只使用一个频率的连续波信号,通过测量回波信号和发送信号之间的相位差来获得精确的距离信息,但是干涉雷达存在相位模糊问题,可测量范围只相当于载波波长的一半。传统的FSK雷达[7-8]使用2个频率的信号,可放大不模糊的测距窗口,通过相位信息可以计算出目标的距离信息,但是当目标与雷达相对静止时,无法估计出目标的距离。
文献[9]提出了一种毫米波调幅连续波(Amplitude Modulated Continuous Wave,AMCW)雷达,通过包络相位对载波相位进行解模糊处理,可以在15 cm的测距窗口内实现微米精度的目标距离测量。然而本文使用双边带调制(DSB)的雷达探测信号波形,接收端采用相干方式解调处理,复杂度较高,且由于该方法的鲁棒性较差,使得系统在低信噪比(SNR)情况下测距精度大幅下降。
针对低信噪比环境下AMCW测距精度明显下降的问题,提出了一种利用低频包络和锁相环(PLL)相位锁定和跟踪来探测目标距离变化的算法。由于低频包络信号具备不模糊距离长的优点,且在低信噪比环境下经过PLL处理可有效减小系统的测距误差。通过仿真实验和实际测试验证了该算法在低信噪比环境下的鲁棒性。
1 AMCW测距基本原理
调幅连续波的发射信号可以表示为:
sTx=sin(2πfct)sin(2πfmt),
(1)
式中,fc为载波频率;fm为调制频率。
假定环境中有一个静止目标,通过接收端下变频处理后得到复基带信号,可以表示为:
sRx=Arejφsin(2πfmt+φm)+n(t),
(2)
式中,Ar为接收信号的幅度;φ为载波相位;n(t)为噪声;包络信号相位可以表示为φm=fmτ,τ为目标时延,则目标的距离可以表示为:
(3)
式中,c为光速;n为整数;λc与λm分别为载波波长和包络信号波长。
通过估计出的低频包络相位来计算n的值,完成对载波相位的解模糊处理,获得目标的精确距离信息。但是,考虑到系统受到高斯白噪声的影响较大,系统的测距精度会随着SNR而变化。传统AMCW信号处理框图如图1所示。

图1 传统AMCW信号处理框图
2 基于锁相环的AMCW包络跟踪算法
目标回波信号中均包含噪声,当信噪比大于15 dB时,传统的AMCW系统具有较好的测距精度;然而当信噪比降低时,将导致该系统测距的性能下降。鉴于PLL[10-14]具有窄带滤波特性与良好的跟踪特性,可对含噪声的包络信号进行捕获与跟踪,本文提出基于PLL的AMCW包络跟踪算法,可有效提升低信噪比下系统的鲁棒性。
改进后AMCW系统的发射信号可以表示为:
sTx=(A0+sin(2πfmt))sin(2πfct),
(4)
式中,A0为直流分量。
仍然假定环境中有一个静止目标,通过接收端包络检波并去除直流分量后得到包络信号可以表示为:
srx=A1sin(2πfm(t-τ))+n(t),
(5)
式中,A1为接收信号的幅度。
然后经过PLL处理,锁定输出的同频信号满足与接收包络相位同步,则锁定后的信号可以表示为:
sRx=sin(2πfm(nTs-τ+θ(n))),
(6)
式中,Ts为采样时间间隔;θ(n)为PLL锁定后的稳态相差。最后跟本地的sin(2πfm(nTs))做鉴相,即可得到目标的精确距离。整个接收端信号处理框图如图2所示。
改进后系统的测距精度仅与PLL锁定后的稳态相差有关,该稳态相差可通过调节PLL参数进行约束。而PLL的性能主要由环路滤波器决定,本文采用二阶锁相环路,其数学化环路滤波器结构如图3所示。
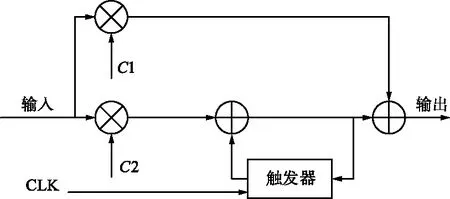
图3 环路滤波器结构
调整环路参数即是对图3中的C1,C2进行调整,文献[15]直接给出了C1,C2的计算式及其详细推导:
(7)
式中,ξ为环路阻尼系数,工程上一般取0.707;wn为环路固有振荡频率;T为频率更新周期;K为环路增益。
3 系统仿真与实测验证
结合仿真数据分别验证了在不同环境下,采用不同参数的PLL处理后可以有效发现目标,并且提高其测量精度。此外,结合自研的雷达数据采集平台采集的实测数据,验证了提出方法的有效性。
3.1 仿真测试
3.1.1 不同SNR对测距精度的影响
为验证PLL能够降低噪声的影响,提高其测量精度。该仿真实验假设环境中只有一个目标的情况下,按照表1给出的雷达系统参数验证算法的有效性,并且假设目标距离为7.5 m。

表1 雷达系统仿真参数
由于在该仿真环境中只有一个目标,PLL的固有频率可以适当减小,增加环路对输入噪声的滤除能力。计算得到环路参数C1=0.008 9,C2=0.000 000 039 5。
SNR=3 dB,目标在7.5 m处时,接收端是否经过PLL处理的多次误差比较如图4所示。从图中可以看出,经过PLL处理后,测量误差比没有经过PLL处理的低一个数量级。在不同SNR情况下,是否经过PLL处理的测距均方误差(Mean Square Error,MSE)比较如图5所示,图中每个点分别进行了500次的蒙特卡罗模拟。从图5可以看出,随着SNR的增加,测距的MSE都呈现下降趋势,但是经过PLL后,降低了包络相位检测的门限效应及噪声的影响,所以MSE比没经过PLL处理的小。因此,当环境中只有单一目标时,本方法可实现精确测距。
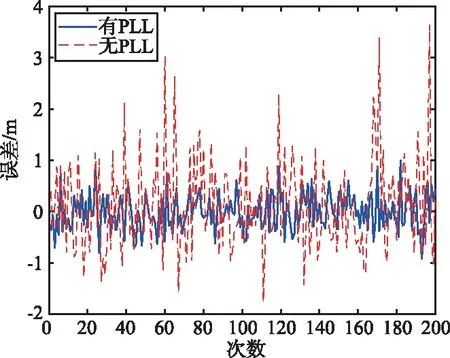
图4 有无PLL的误差对比
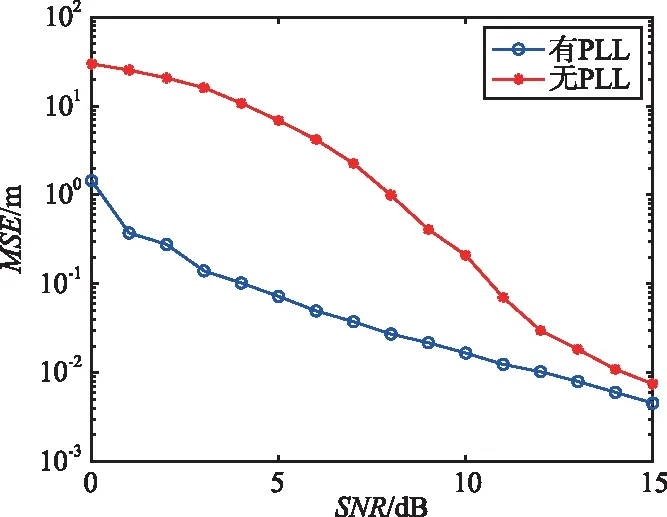
图5 不同SNR下均方误差对比
3.1.2 多径效应对测距性能的影响
该仿真实验是基于背景反射静止时的复杂环境下(也可以理解为多径情况下),验证经过PLL处理的性能及复杂环境对其测量的影响。雷达系统参数同表1。由文献[16]可知,回波信号中由多径引起的相位误差和多径数、衰减因子有关。本仿真实验讨论的是低反射环境下对目标相位偏移量测量的影响,假定目标回波幅度大于其他反射波幅度的情况,假定目标距离为7.5 m。
不同衰减因子随SNR变化的MSE对比如图6所示。通过调节环路参数,计算得C1=0.003 6,C2=0.000 001 58。其中衰减因子代表了其他路径与目标回波的幅值比,以目标回波的幅值作为参考。从图6可以看出,衰减因子对相位误差的大小起着决定性作用。随着衰减因子的增大,多径回波信号的强度也在增大,引起的相位误差也在增大。

(a) 衰减因子为0.1
图7对比了在给定衰减因子以及SNR的情况下,随着多径数的增加带来的影响。

(a) SNR=5
从图中可以看出,经过PLL处理后,系统的鲁棒性大幅提升。图7(b)说明了随着多径数的增加,导致其相位误差增大,使得系统的测量误差变大。因此本系统在实际应用时,多径数不宜过多。
3.2 实验测试
为了验证本文方法在不同环境下的性能,利用软件无线电平台NI USRP-2974搭建了测试平台。如图8所示。

图8 实验场景1
验证平台由上位机、USRP、板状收发天线等构成,通过上位机来控制雷达波形数据的发送与接收,其中波形参数及射频参数配置与仿真相同,USRP发射功率设为0 dBm;另外,实验场景1设置在一过道中,在离设备11 m处有一静止目标。如图9所示,场景2设置在实验室中,在离设备1 m处有一人体目标,人体呼吸会造成目标的胸腔微动。

图9 实验场景2
静止目标的绝对距离估计对比如图10(a)所示,测距误差对比如图10(b)所示。从图中可以看出,在目标回波比其他径回波幅值高的情况下,经过PLL处理后的测距精度比没有PLL处理的高,且与相干处理方法相比较,测距精度几乎一致。

(a) 绝对距离测量
PLL处理后和无PLL处理的胸腔位移结果分别如图11和图12所示。

图11 PLL处理后胸腔位移结果
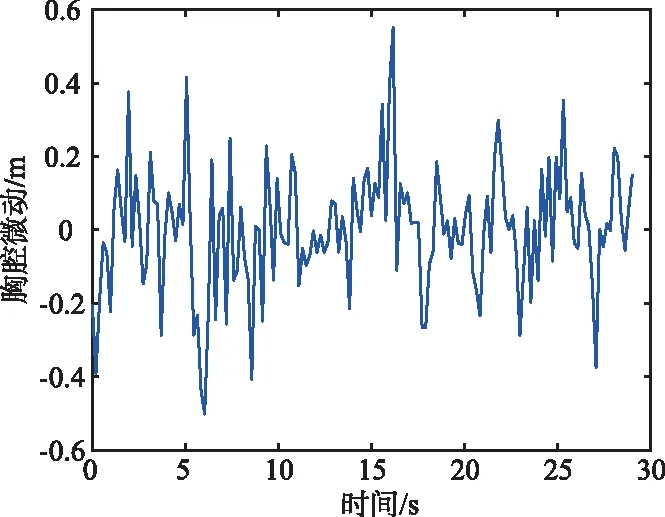
图12 无PLL处理胸腔位移结果
从图11和图12中可以看出,人体因呼吸导致的胸腔微动距离变化。经过PLL处理后系统可以较为准确地跟踪人体呼吸导致的胸腔位移变化,而没有经过PLL处理的,无法准确跟踪人体的胸腔位移变化。
正常成年人安静状态下的呼吸频率通常在0.1~0.6 Hz。PLL处理后胸腔频率估计如图13所示。
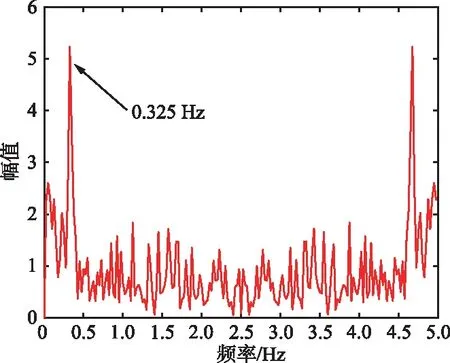
图13 PLL处理后胸腔频率估计
从图13可以看出,频谱峰值频率为0.325 Hz,经过PLL处理后估计出的人体呼吸频率在正常范围内。无PLL处理胸腔频率估计如图14所示。从图14可以看出,尽管其峰值频率也在正常范围内,但是其频谱受到噪声的影响存在很多幅值较高的频率分量,增加了系统的虚警率。
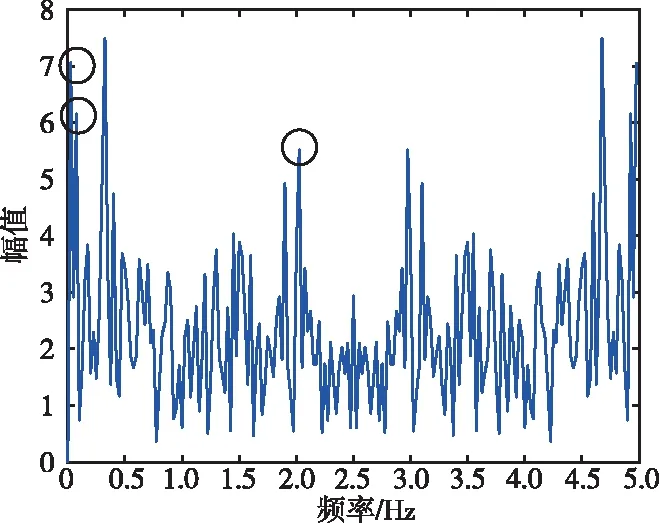
图14 无PLL处理胸腔频率估计
4 结束语
当SNR>15 dB时,传统的AMCW系统具有较好的测距精度;然而当SNR降低时,将导致系统的测距性能下降。对此,提出一种基于PLL的包络信号跟踪算法,该算法复杂度低、可移植性强,不占用大的带宽,并且PLL的引入,降低了噪声的影响,使系统的测量精度得到了提高。实验仿真与平台测试验证了该算法在不同场景下的性能优势。
在实际的复杂环境中,多径将会是影响系统测距精度的主要因素,故而下一步的研究方向为如何降低或消除多径引起的相位误差。
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
传染病信息(2022年3期)2022-07-15
河北工业大学学报(2021年4期)2021-09-23
科学(2020年3期)2020-01-06
现代临床医学(2019年6期)2019-12-07
中国医药指南(2017年3期)2017-11-13
电子制作(2017年7期)2017-06-05
现代防御技术(2017年2期)2017-05-13
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10