
天线指向机构减振设计与试验研究
2021-07-15 02:48刘宽耀庄春跃刘伟平朱骏刘洪生
机械工程师 2021年7期
刘宽耀,庄春跃,刘伟平,朱骏,刘洪生
(上海无线电设备研究所,上海 200240)
0 引言
天线指向机构是星载合成孔径雷达的重要组成部分,要实现对地面条带进行成像,需保证天线波束指向地面条带中心,并且保持波束在水平面的投影与条带中心线的角度不变[1]。天线在挂飞试验中受到发动机振动、姿态变化、风阻力矩等一系列复杂振动,天线指向的低频抖动会引起多普勒频谱的微小变化,从而使多普勒中心频率估计产生误差,进而引起图像位置的偏移,恶化成像质量[1]。因此,需将减振设计技术运用到天线指向机构设计中,以实现稳定的天线指向。
随机振动条件下指向机构隔振技术一直是振动领域的研究热点。李林等[2]采用减震器并联的方式,设计并优化了一套被动隔振系统,光电指向机构主振方向隔振效率达75%。宋科[3]针对传统无人机稳定云台结构稳定性不佳而难以高质量成像问题,对云台结构材料选择、结构设计及载荷位置等方面进行研究,实现对位移振动做出补偿。YANG等[4]基于鲁棒控制在光电指向机构上引入特定的额外干扰,此方法可有效地估计参数不确定性的输入扰动量,提高平台的稳定性。SUN等[5]提出一种主被动隔离复合的光电指向机构,外框采用主被动复合隔离器,内框用高阻尼干摩擦阻尼器,这套系统满足设计要求,但刚度不足。李运动等[6]根据某型光电系统工况,开展减震器匹配设计,有效隔离中高频振动,使成像质量得到很大提高。郑凤翥等[7]针对现有内置橡胶减振系统的诸多不足,采用金属减震器,设计出一款适用于机载光电设备的外置型隔振系统,满足稳定精度要求。朱石坚[8]发现控制带宽受结构固有频率、电动机特性及陀螺带宽制约,目前小于25 Hz,因此需采用被动隔振方式抑制20~500 Hz及以上的振动扰动。
综上所述,目前指向机构的减振研究主要针对的是光电系统,尚未有对星载合成孔径雷达的发射天线指向机构和接收天线指向机构进行同步减振的物理验证。本文基于减振系统设计理论,对天线指向机构开展减振设计,对比分析了同工况条件下有无减振系统的天线稳定性差异,为后续卫星载荷上天可靠工作奠定了基础。
1 减振系统设计理论
减振系统力学模型因工程实际不同而复杂多样,但是典型的单自由度系统的强迫振动模型是大多数减振问题的基础。基于以下假设:1)产品的中心处于减震器的弹性中心;2)产品刚度比减震器要大很多,产品近似为刚体。
单自由度弹簧-质量-阻尼系统的基本力学模型如图1[6]所示。

图1 单自由度系统的力学模型
设作用在系统上的激励是简谐函数,x1=A sinωt,则质量体m的运动微分方程为

设式(1)的特解为

将式(2)代入式(1)整理后,得到传递率T,表示被动隔振效果,定义为减振后产品的振动幅值与外界振源幅值之比,则其传递率为


传递率T与频率比λ、阻尼比ζ有关,三者关系曲线如图2所示。

图2 阻尼、频率比、传递率关系图
2 天线指向机构减振系统设计
依据指向机构减振需求和减振设计理论,天线指向机构系统减振原理图如图3所示,由机体、减震器、安装板、指向机构、天线、支撑棒、保护罩构成,转接板安装在飞机内舱底板上,减震器分布在转接板上,减震器上方放上安装板,支撑棒穿过飞机底部方槽延伸到舱外并连接起两块安装板,指向机构吊在下安装板下,天线安装在指向机构上,同时保护罩通过支撑棒吊在下安装板上,实现对天线指向机构的整体减振。图3中,X轴定义为飞行器横滚轴,Y轴定义为飞行器俯仰轴,Z轴定义为飞行器方位轴,三轴符合笛卡尔坐标规则。

图3 天线指向机构减振原理图
由以上减振系统分析可知,减震器围绕质心均匀分布,且指向机构质心低于减震器支点所在平面,减振系统动力学示意图如图4所示,指向机构在Z方向上的平移运动与指向机构关于Y轴的转动存在耦合,在Y方向上的平移运动与指向机构关于X轴的转动存在耦合,其他运动模态之间无耦合。由于质心偏离距离与指向机构转动惯量比值不大,可以忽略,因此振动耦合对系统的影响较低。
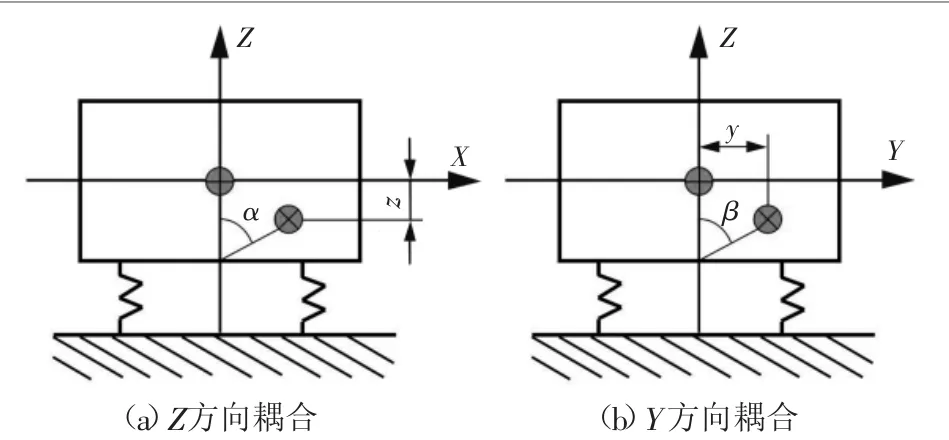
图4 减振系统动力学示意图
根据天线指向机构系统总质量,拟采用10个减震器并联方案,每个减震器承受的质量为8 kg。
载机的振动频带为20~2000 Hz,其振动环境由宽带随机谱迭加窄带尖峰所组成,则初步选定减震器固有频率小于20 Hz。
根据工程经验,频率比λ取2,不失一般性,取阻尼比ζ=0.3,由式(3)可得共振情况下减振系统传递率T=2.27。
天线指向机构处于载机环境时,在谐振频率处等效加速度响应(3σ)[6]为

式中:Si为谐振频率处输入随机振动功率谱密度;fn为减震器固有频率。
加速度引起的减振系统运动变形为

将相关参数代入式(4)与式(5)可得减振系统运动变形为5.18 mm。
基于上述参数,并结合体积空间、耐腐蚀性等要求,优选全向减震器CBA8,减震器的性能参数如表1所示。

表1 减震器性能参数
全向减震器内部结构图如图5所示,由轴、外壳、底座、橡胶球、顶板构成,轴的底部包裹球状橡胶,与外壳、顶板、橡胶球接触,通过接触副摩擦和橡胶球的变形可实现三个方向的振动隔离,且三个方向上的固有频率相同或者相近,故全向减震器又称为三向等刚度减震器。

图5 减震器结构图
3 减振系统试验验证
3.1 指向机构减振试验系统
如图6所示,指向机构减振试验系统由天线指向机构控制系统和振动监测系统两部分组成。

图6 振动试验测试系统
天线指向机构控制系统由控制盒、惯导、计算机构成,惯导安装在振动台上,模拟载机平台运动,系统处于半捷联模式。稳定精度指在载机扰动环境下,指向机构进入惯性稳定后的稳态角度误差[7]。稳定精度的测量方法如下:指向机构通电,先使系统处于预定回路工作状态,并使方位、俯仰预定角度为零,然后使方位、俯仰角速度预定值为零,使系统处于稳定回路工作状态,记录方位位置和俯仰位置反馈角,计算稳态角度误差。
振动监测系统如图6所示,包含振动台、功率放大器、计算机、数据采集仪及加速度传感器。试验中天线指向机构安装在振动台上,振动台面及转接板上粘3个加速度传感器,作为振动输入控制,以三点的加速度平均信号来控制振动台。指向机构上固定1个加速度传感器,监测振动响应谱。激励振动谱为国军标规定的梯形谱,梯形谱功率谱密度为0.03 g2/Hz。
3.2 振动特性测试与分析
图7为X向、Y向、Z向随机振动响应曲线,天线指向机构加装三向等刚度减震器后,X向监测点处振动能量由减振前的3.29g减小到减振后的0.54g,Y向监测点处振动能量由减振前的2.65g减小到减振后的0.73g,Z向监测点处振动能量由减振前的2.19g减小到减振后的0.5g,三个方向都表现出较好的减振效果。

图7 三个方向振动响应曲线
天线指向机构加装三向等刚度减震器后,X向和Y向的固有频率均为24 Hz,与减振系统在X向和Y向对称性有关,Z向由于组合形式的影响,固有频率为28 Hz,减振系统具有较低的固有频率。
天线指向机构加装三向等刚度减震器后,X向、Y向、Z向共振点附近的曲线比较陡峭,说明共振放大区频带窄,易避开干扰频率点。
加装三向等刚度减震器后,曲线整体上呈衰减趋势,说明高频振动减振较为明显。
3.3 稳定精度测试与分析
图8~图10分别为X向、Y向、Z向天线指向机构在不安装三向等刚度减震器和安装三向等刚度减震器情况下方位和俯仰的稳态方位和俯仰位置反馈角曲线图。为了更直观地对比分析稳定精度,列出X向、Y向、Z向稳态角度误差,如表2所示。从表2中可看出,X向方位向标准差由减振前的0.0328减小到减振后的0.0065,数值上减少了80.2%,俯仰向标准差由减振前的0.2826减小到减振后的0.0109,数值上减少了96.1%,说明安装三向等刚度减震器后天线指向机构两个方向的稳态误差大幅减小,稳定精度明显提升,且X向俯仰向标准差降低幅度比方位向大,说明减震器对俯仰向稳定精度贡献偏大;Y向和Z向稳态角度误差变化趋势与X向相同。
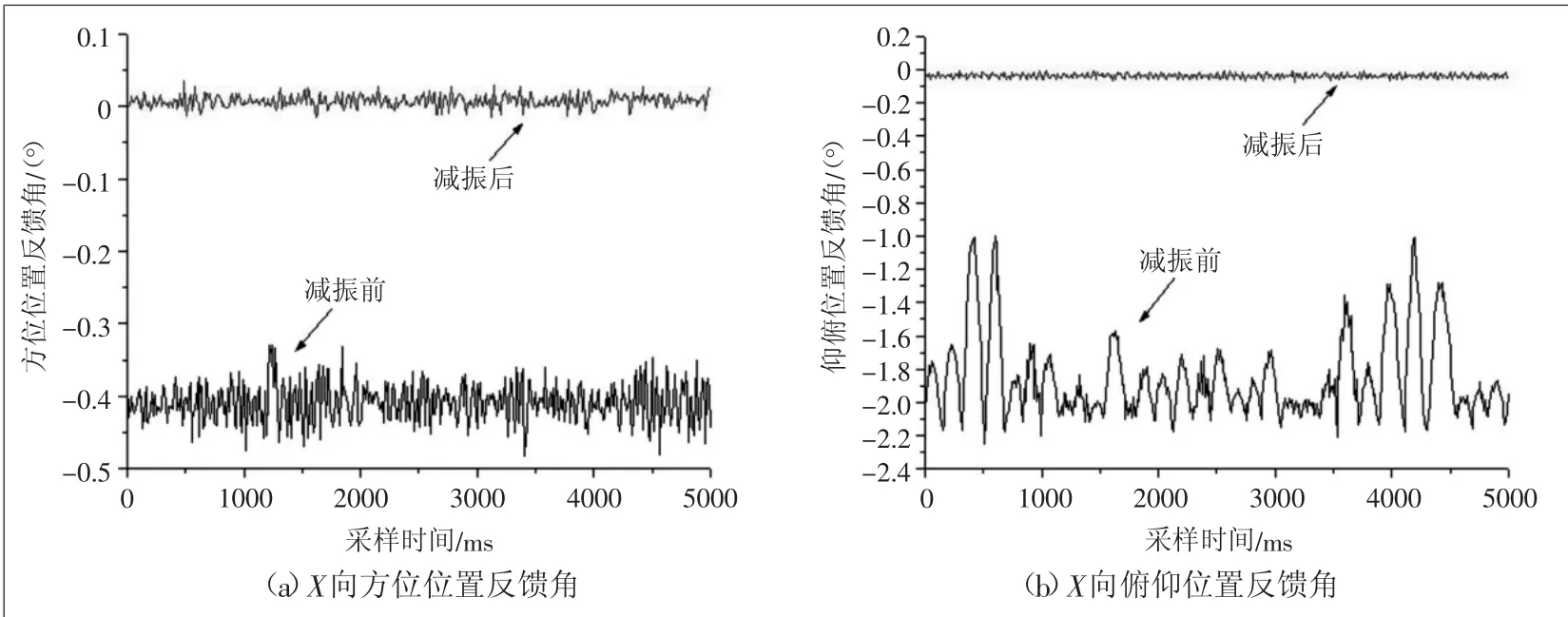
图8 X向位置反馈角

图9 Y向位置反馈角

图10 Z向位置反馈角

表2 三个方向稳态角度误差
安装三向等刚度减震器后,方位向标准差比俯仰向小,方位向稳定精度更高。
4 结语
本文根据天线指向稳定性需求,利用减振系统设计理论,合理选择了频率比和阻尼系数,为天线指向机构设计了一组三向等刚度减震器,并对减震器进行了合理的布局,搭建了减振系统测控平台。对比分析了同工况条件下有无减振系统的天线稳定性差异。振动响应结果表明,天线指向机构加装三向等刚度减震器后,系统固有频率低,半功率带窄,高频减振明显,整体减振效果好。稳定精度测试表明,加装三向等刚度减震器后,俯仰和方位向精度提升明显,且方位向稳定精度更高,保证天线指向稳定,满足总体对稳定精度的指标要求,为后续卫星载荷上天可靠工作奠定了基础。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
幼儿园(2021年12期)2021-11-06
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
橡塑技术与装备(2021年1期)2021-01-05
汽车实用技术(2019年5期)2019-03-22
传媒评论(2017年8期)2017-11-08
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
科技视界(2014年7期)2014-08-15
