
手术机器人输出反馈技术专利分析综述
2021-07-27 03:48王丽娜赵玉航
电子元器件与信息技术 2021年5期
王丽娜,赵玉航
(国家知识产权局专利局专利审查协作江苏中心,江苏 苏州 215500)
0 引言
如今外科手术机器人由于其高度的精准性,已经得到了外科医生的广泛认可,已经在神经外科、腹外科、普通外科等领域得到了广泛的应用[1]。目前外科手术机器人系统多数采用主从位置控制,使机器人从手跟随主手的运动以完成手术操作[2],最大的局限之一就是外科医生缺乏操作的手感,即力觉和触觉反馈,这增加了手术的不确定性和风险性。因此,手术机器人手术过程中,具有良好的输出反馈,以确保手术操作的精确性和灵活性,同时还要增加现实感和真实感,以及确保病人的安全,是至关重要的。
1 专利申请整体状况分析
通过对检索到的全球范围专利申请进行分析(检索截止2020年8月),得出全球范围手术机器人输出反馈技术专利申请的申请时间(年份)的分析如图1所示。
从图1可知,早在上世纪80年代,已有国外公司开始进行手术机器人研发,并对人机交互输出反馈技术进行申请相关专利进行保护。上世纪90年代直至本世纪初,此时手术机器人处于初始萌芽期,相应的全球手术机器人输出反馈技术申请量较少。2005-2015年为手术机器人的成长期,此时全球手术机器人输出反馈技术也开始增多。近年来,随着医疗机器人的技术研究和产品开发持续推进,手术机器人是医疗机器人范畴中占比最大也是最重要的领域,自2015年开始,全球手术机器人输出反馈技术的申请量呈现快速增长趋势,说明当前手术机器人仍为当前的研发热点[3-4]。

图1 全球专利申请的年度趋势
图2显示了全球的申请量排名前10位的申请人,以及申请来源区域分布。

图2 全球主要申请人及申请来源区域分布
从图2可知,全球的专利申请量上60%来自美国,其次为中国、韩国、以及WO申请,这表明了美国在手术机器人输出反馈技术上处于优势。另外,全球的申请量排名前10位的申请人都是国外申请人,其中直观外科手术操作公司的专利申请数量较其他申请人相差一个数量级,该公司的达芬奇作为唯一得到FDA认证的手术机器人,几乎垄断全球市场。
2 专利技术分支分析
针对本文所检索到的全球专利申请,可将目前手术机器人输出反馈技术分为视觉、力觉、触觉几大类,如图3所示。
各技术分支的占比如图3所示,由图中内环可见,视觉反馈占据了63%,其次为力觉24%,触觉11%,其他方式2%。其中,根据视觉反馈信息处理方式可以细分为2D显示、3D显示、AR/VR显示、全息投影以及其他视觉反馈输出,各细化技术分支的占比如图3中外环所示,由图可见,2D、3D、AR/VR、全息投影的占比依次递减,这是因为以上视觉显示方式的信息处理成本是依次递增的[5]。
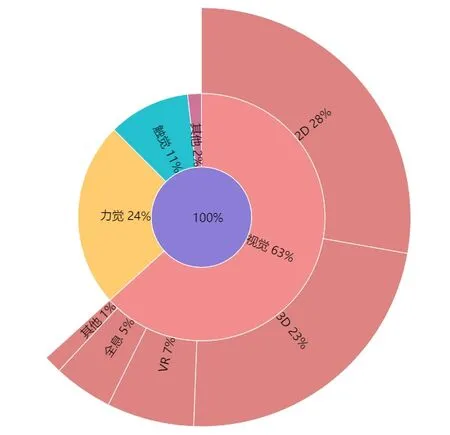
图3 手术机器人输出反馈技术分支分布
图4示出了各技术分支的逐年申请趋势。由图可知视觉反馈的是输出反馈的重要来源,而力觉反馈自2015年以来开始有明显增长,而触觉反馈的申请则比较平稳。
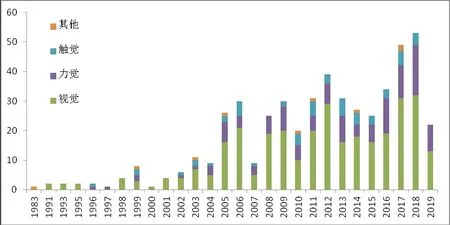
图4 手术机器人输出反馈技术分支逐年申请趋势
图5示出了视觉反馈技术分支逐年申请趋势。由图可知视觉反馈中2D和3D是视觉反馈的主要申请来源,两者每年的申请量相差不大,自2015年以来,AR/VR、全息等反馈开始有明显增长。
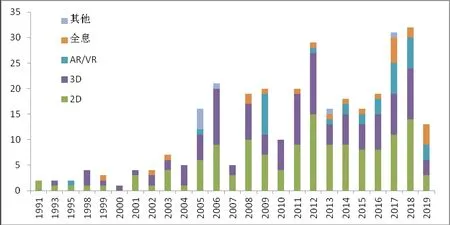
图5 手术机器人视觉反馈技术分支逐年申请趋势
3 结论
从以上对手术机器人输出反馈技术的分析,可以看出手术机器人输出反馈技术在随着科技的发展而不断发展。人机交互与输出反馈须充分考虑医生的需求和临床应用场景,为实现“更逼真、更精准”,从而降低手术过程中的不确定性和风险性,将力反馈与触觉反馈相结合提高手术的现实感,以及高清成像显示技术提供更准确的定位、成像功能,是手术机器人输出反馈技术研发的重点方向[6-7]。
猜你喜欢
粮食与饲料工业(2022年2期)2022-04-27
黑龙江大学自然科学学报(2022年1期)2022-03-29
海外星云(2021年6期)2021-10-14
学生天地(2019年28期)2019-08-25
特别健康(2018年3期)2018-07-04
领导决策信息(2018年9期)2018-05-24
中国知识产权(2017年10期)2017-10-31
工业设计(2016年4期)2016-05-04
工业设计(2016年10期)2016-04-16
