
我做过的机器人:立式铣床
2021-07-30 20:59刘之怡
大学生 2021年7期
刘之怡

也许你会对立式铣床是否为机器“人”感到疑惑,其实国际上至今还没有被普遍认同的“机器人”的定义, 但根据由国际标准化组织给出的较被广泛接受的定义,“机器人”是一种能够通过编程和自动控制来执行作业或移动任务的机器,你会发现无人机、机械臂等是机器人,而我搭建的立式铣床也是机器人。
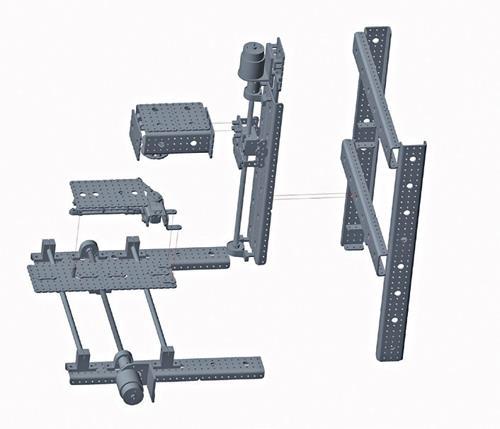
先简单介绍一下铣床:铣床主要指用铣刀在工件上加工多种表面的机床。通常铣刀旋转运动为主运动,工件(和)铣刀的移动为进给运动。铣床主要组成部分有:立铣头、主轴、工作台、床鞍、升降台、床身、底座。
铣床的运动分两种形式:旋转运动转化为旋转运动、旋转运动转化为平动。
铣床至关重要的就是丝杠平动装置,它将转动转化为平动。
我参考STP Viewer,组装一个立式铣床,然后进行电路连接,并且于工作台在 X 轴正向的极限位置安装一个触碰传感器作为限位,立铣头在 Y 轴正向的极限位置安装一个触碰传感器作为限位。
然后按如下步骤写出程序,实现一个模拟加工的工作:
第一步(复位):工作台运动到 X 正向极限位置(控制 1 号电机旋转,直到工作台碰到限位的触碰传感器停止);铣头运动到 Y 正向极限位置(控制 2 号电机旋转,直到洗头碰到限位的触碰传感器停止),工作台运动到 Y 正向极限位置(控制 4 号电机);
第二步:工作台在一号电机所在的丝杠上向-X 方向运动,其中心位置与铣头的中心位置在同一平面上(控制 1 号电机);工作台在一号电机所在的丝杠上向-Y 方向运动,其中位置与铣头的中心位置在同一直线上(控制 1 号电机);铣头开始旋转(控制 3 号电机);
第三步:铣头-Z 方向移动,移动到 2 号电机所在丝杠的中间位置停止(控制 2 号电机);工作台在+X 与-X 方向各匀速移动 1S 的时间(控制 1 号电机正转与反转延迟各 1s);工作台在+Y 与-Y 方向各移动一段距离(控制 4 号舵机顺时针、逆时针各旋转一定的角度);
第四步:铣头在-Z 向移动 1s(控制 2 号电机旋转 1s),暂停 0.3s;铣头在+Z 向移动 1s (控制 2 号电机反向旋转 1s);工作台的运动重复第三步中工作台的运动;
第五步:复位,回到第一步中的位置。
将程序烧录到 Basra 中之后觀察其实际运动效果是否有问题。记得第一次实践时,我因为将四号舵机的接线插反而导致工作台复位时向X 负向极限位置运动。
这次的铣床安装,让我收益颇多。其中,零件组装部分我花费时间最多,在不断组装拆解的过程中,我的意志力得到锻炼,解决困难的勇气也增强了许多,对于机械零件的类型和组装顺序有了更深入的理解。同时,我看建模图纸的能力也随之增强,还学会了STP Viewer的使用方法。除此之外,电机的使用和ardnino的使用,对我程序编写的能力也有所提高。铣床的搭建不仅培养了我对物理动力学及机械控制的兴趣,还使我学到了许多课本之外的知识。作出这样一个灵活的铣床(在X、Y、Z轴平动,Z轴转动),我从心底里感到满足与欣喜!
你也许会疑问:一个没有铣刀,无法对工件进行铣削加工的铣床制作出来有何意义?是的,我的铣床的实用价值相比工厂制作的要低很多,但是它可以由电脑控制自动运作,而工厂制作出来的铣床则需要人亲手运作,这是我尝试从机械化走向自动化的一大步。
责任编辑:宋明晏
猜你喜欢
哈尔滨轴承(2022年1期)2022-05-23
模具制造(2019年10期)2020-01-06
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2018年9期)2018-09-19
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年12期)2017-02-02
制造技术与机床(2015年3期)2015-01-27
金属加工(冷加工)(2014年21期)2014-12-02
