
基于ROS的自主跟随智能小车的设计
2021-08-04 11:07周旭华赖理智钟承志
汽车电器 2021年7期
周旭华,赖理智,钟承志
(河源职业技术学院,广东 河源 517000)
随着科技技术的发展,代替人类工作的各种智能化小车出现在工厂、车间以及家庭服务等场合。目前,智能小车的跟随技术主要有超声波、红外、摄像头传感器、UWB技术等,这些定位和测距技术都较为成熟[1-3]。目前自主跟随小车智能化需求不断提高,且系统的可移植性要求也越来越强,针对这一需求,2010年Willow Garage公司发布了开源机器人操作系统ROS,该系统能够大大缩短开发的时间,且极大提高了智能小车软件上的移植性和复用性,同时也提高了软件的兼容性。本文设计了以树莓派为上位机,Arduino UNO为下位机,ROS为核心通信架构的目标自主跟随小车[4]。
1 智能小车整体设计
以树莓派为上位机主控制板,Arduino UNO板为下位机辅控制板,搭建上位机和下位机的通信架构,激光雷达在未知的环境中获得自身位置信息、目标物体位置信息,上位机获取处理的目标位置信息,发送命令到Arduino UNO板,Arduino通过接收树莓派传来的信号来给予电机驱动板信号,控制小车实现自动跟随目标物体。其系统结构框图如图1所示。

图1 系统结构框图
2 硬件设计
2.1 硬件结构设计
小车主要由树莓派3b、Rplidar-A1激光雷达、Arduino UNO控制板、微型直流减速电机、直流电机驱动模块、降压模块、电池等部件组成,其结构设计如图2所示。

图2 小车结构设计图
2.2 下位机硬件设计
2.2.1 电机驱动模块
电机驱动模块接收到Arduino UNO发送过来的指令可以单独控制左右电机的速度,电机驱动模块的IN1、IN2、IN3、IN4分别与Arduino UNO的7、8、9、10号端口连接,控制电机正反转、制动,+5V端口可接5V或3.3V为信号端提供电 源,ENA1、ENA2为电机使能端,连接PWM端子6、5来调节电机速度。ENA1控制左边的电机,ENA控制右边的电机。其NO与电机驱动模块、电机的连接如图3所示。
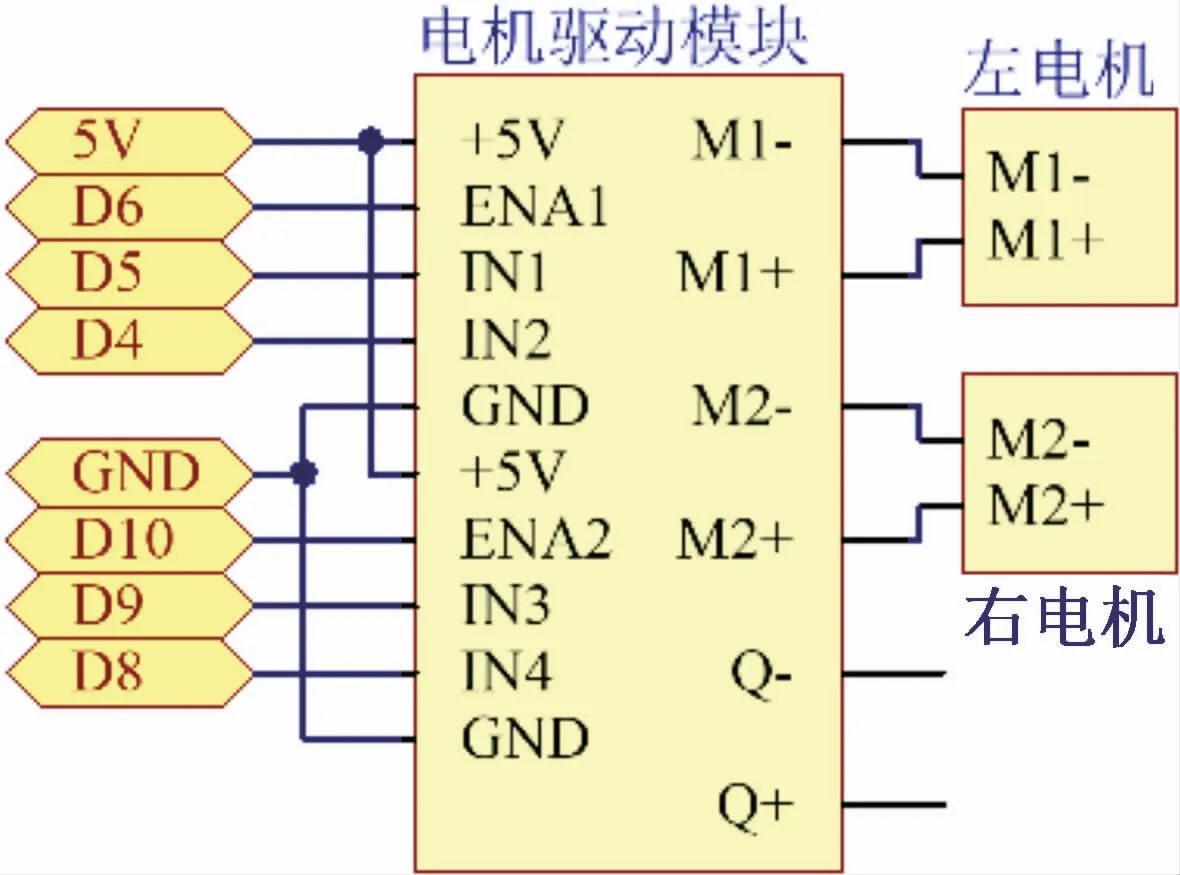
图3 ArduinoUNO与电机驱动模块、电机的连接电路图
2.2.2 电动机编码电路
电动机运用编码器,可以由PID部分控制轮速,让小车在自动跟随目标物体运动时能够更加平稳地行驶跟随,图4为Arduino UNO与电机编码器连接电路图。
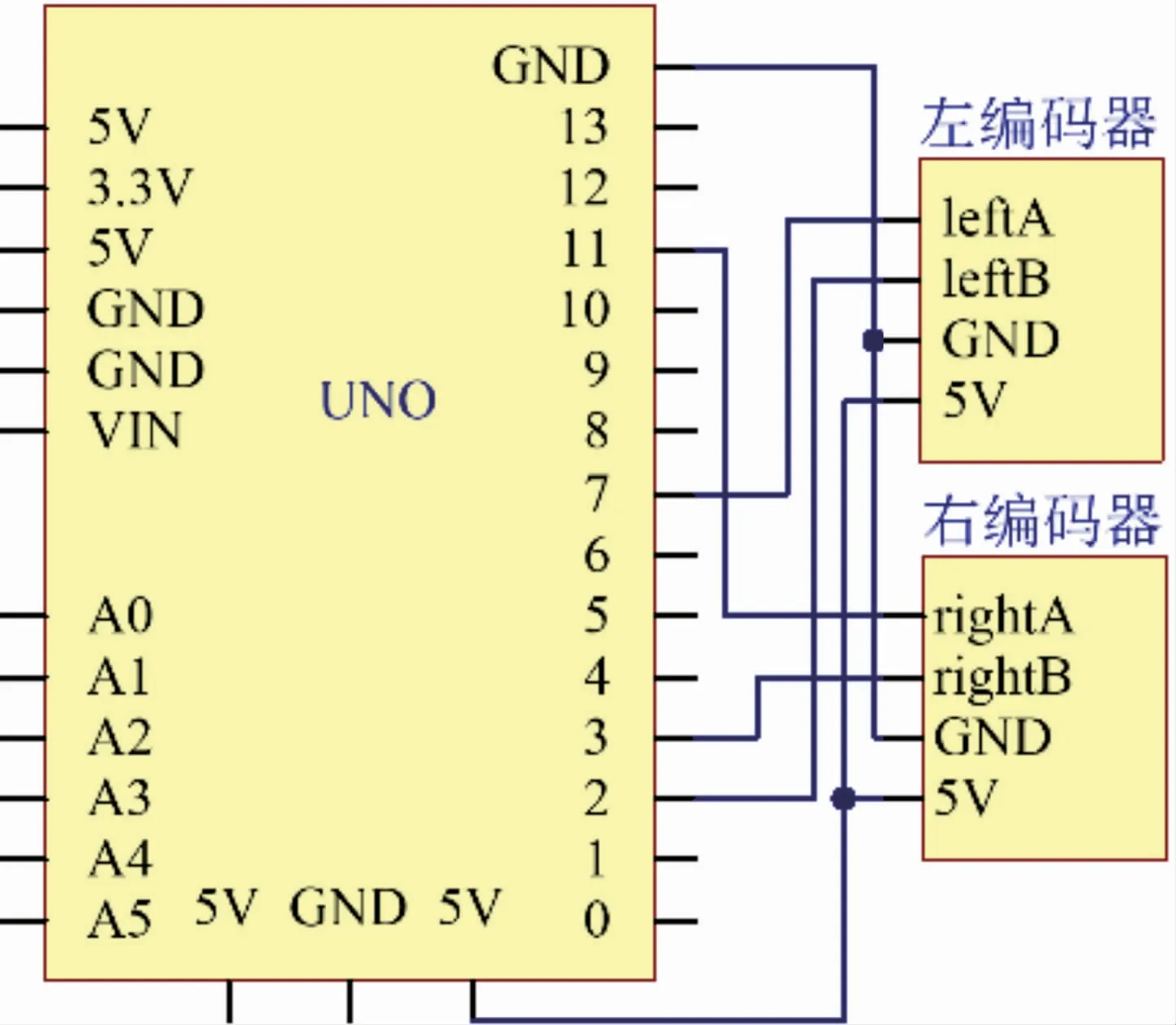
图4 Arduino UNO与电机编码器连接图
2.3 上位机硬件设计
2.3.1 传感器电路
树莓派与雷达之间的连接是通过USB配置器的,VMOTO是雷达电机的供电引脚,MOTOCTL是雷达电机的启闭引脚(高电平有效),输入PWM信号可实现电机调速,VS.0是雷达测距核心的供电信号,TX是雷达测距核心的TTL串口输出,RX是雷达测距核心的TTL串口输入。USB配置器再通过USB线与树莓派连接,实现树莓派与雷达之间的通信,如图5所示。

图5 雷达与树莓派的连接电路图
2.3.2 上位机与下位机通信电路
树莓派和Arduino UNO板均由同一个锂离子电池供电,树莓派的供电压为5V,为了保护树莓派不被烧坏,电源供给树莓派的电压必须通过降压模块降至5V,如图6所示。

图6 电源与电机驱动模块、UNO的连接电路图
2.3.3 整体设计电路图
激光雷达在未知的环境中获得自身位置信息、目标物体位置信息,上位机获取处理的目标位置信息,发送命令到Arduino UNO板,Arduino通过接收树莓派传来的信号来给予电机驱动板信号,控制小车实现自动跟随目标物体。整体设计电路如图7所示。

图7 整体设计电路图
3 软件设计
搭建ROS小车软件由Unbuntu 16.04平台、ROS系统平台、ros_arduino_bridge通信程序、电机控制程序、主程序、rplidar_follower跟随程序等部分构成。软件系统设计如图8所示。
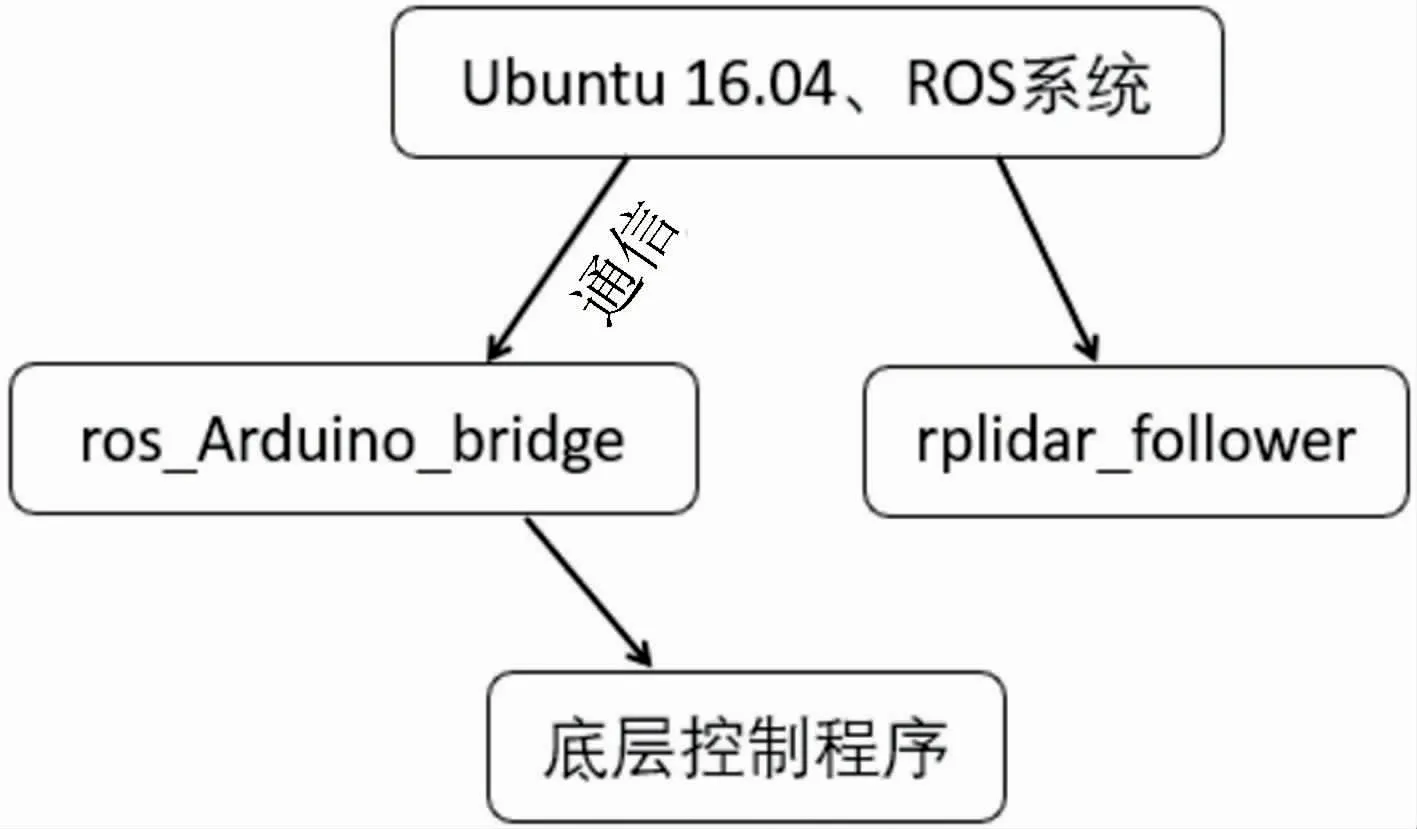
图8 软件设计
3.1 下位机的搭建
在Arduino上完成驱动电机的PID控制,以及与上位机通信程序的实现。然后在上位机安装ROS ArduinoBridge库,再配置ros_arduino_python节点,实现下位机与上位机之间的通信搭建,这个ROS功能包集用于实现ROS与Arduino的通信,负责接收ROS系统发送的速度控制话题/cmd_vel,并将话题信息进行解析,转化为底盘电机的速度信息。同时该功能包还负责接收Arduino上发送的编码器信息,并将相关信息转化为里程计信息,并以/odom话题的形式发送出来供ROS使用。
3.2 跟随程序的设计
基于ROS系统,用激光雷达扫描并公布最近物体的位置,按照距离排序以检查较近点是否真实,返回控制信号,读取角度的距离,然后获取到目标物体,最终输出角速度和线速度给小车,追踪目标物体。图9为程序设计流程图。
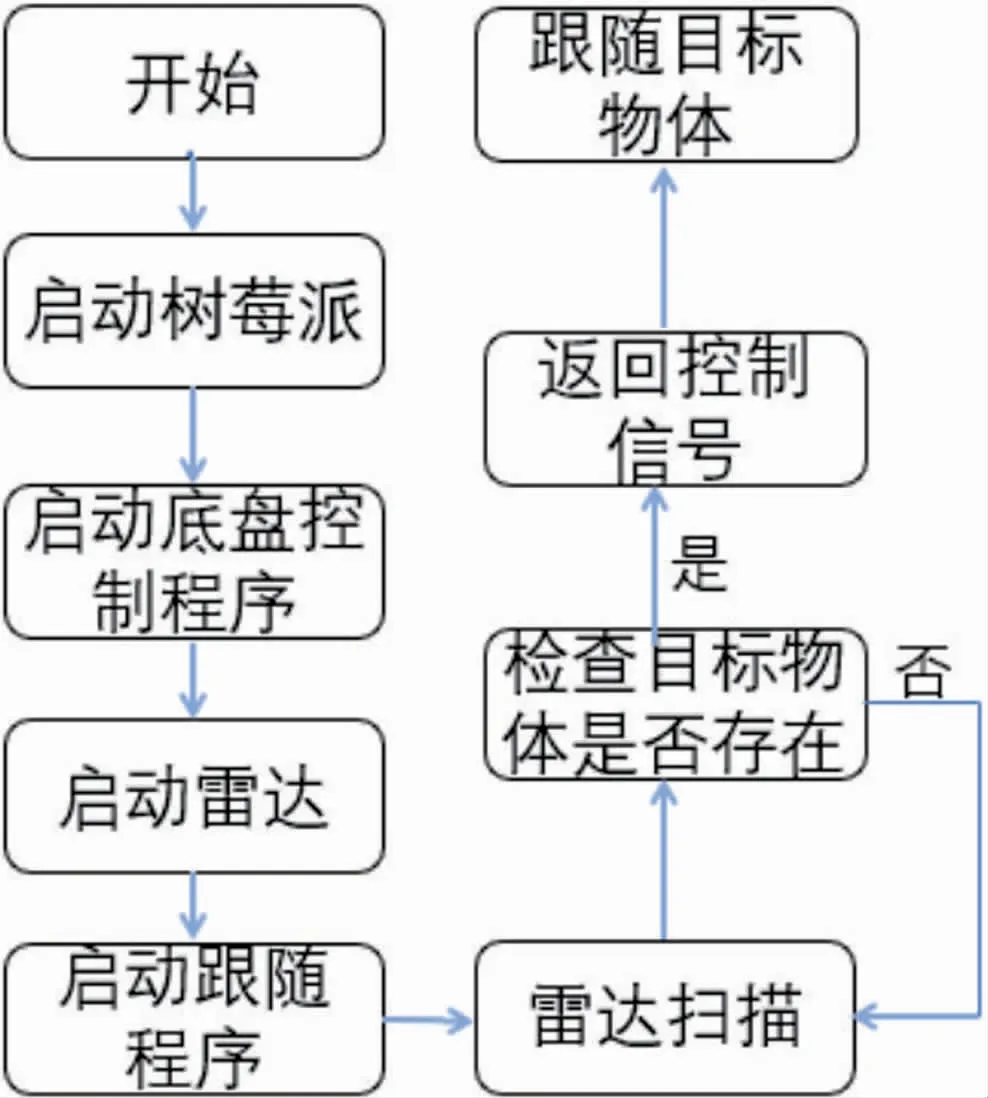
图9 程序设计流程图
3.2.1 跟随功能程序分析
首先,跟随功能包节点laser_follower.launch文件加载启动rplidar.launch和follower.launch和LaserTracker.launch三个launch文件,其中rplidar.launch文件主要用于启动激光雷达传感器;LaserTracker.launch文件主要进行当前目标离小车的最近距离测量;follower.launch此文件各参数可以改变跟随目标的距离,设置小车的最大速度(线速度、角速度),且通过加载PID_param.yaml,可以调节pid让小车行驶得更平稳快速达到目标速度,跟随目标物体。
3.2.2 激光雷达扫描程序分析
利用Python语言进行编程,Python语言不需要编译,可以在ROS框架下编写后直接在Linux终端执行即可[5-7],智能小车通过激光雷达扫描到最近的物体,并公布就近物体的位置信息,按照距离去检查较近点目标是否真实,如果真实,这个点将和最后一次扫描点进行比较,从最近距离检查所有距离的测量,检查是否有相似距离扫描,进行分析处理(至少找到一个点的合理距离,至少一点接近),计算对象位置的角度,来确定目标物体位置信息,如果没有找到,将会重新扫描直至找到目标物体,图10为智能小车激光雷达扫描流程图。部分程序如下:

图10 激光雷达扫描流程图
def registerScan(self,scan_data):#记录激光扫描并公布最近物体的位置
ranges=np.array(scan_data.ranges)#按距离排序以检查距离较近点是否真实
sortedIndices=np.argsort(ranges)
minDistanceID=None
minDistance=float('inf')
if(not(self.lastScan is None)):#如果我们已经有了最后一次扫描:
for i in sortedIndices:#从最近的距离开始检查所有距离测量
tempMinDistance=ranges[i]
#检查是否有相似距离的扫描,在最后一次扫描中,就不会有索引超出范围windowIndex=np.clip([i-self.winSize,i+self.winSize+1],0,len(self.lastScan))
window=self.lastScan[windowIndex[0]:windowIndex[1]]
with np.errstate(invalid='ignore'):
#检查窗口中的任何扫描(在上次扫描中)是否与当前扫描的距离足够近
if(np.any(abs(window-tempMinDistance)<=self.deltaDist)):
#this will also be false for all tempMinDistance=NaN or inf
minDistanceID=i
minDistance=ranges[minDistanceID]
break#at least one point was equally close
self.lastScan=ranges
if(minDistance>scan_data.range_max):#没有找到一个合理的目标
rospy.logwarn('laser no object found')#发布警告说我们没有找到任何东西
self.infoPublisher.publish(StringMsg('laser:nothing found'))
else:#计算对象位置的角度
minDistanceAngle=scan_data.angle_min+minDistanceID*scan_data.angle_increment
self.positionPublisher.publish(PositionMsg(minDistanceAngle,42,minDistance))
3.2.3 智能下车驱动程序
同样,该程序用python编写,小车对追踪对象的当前位置(角度、距离),进行处理分析,调用pid控制器进行更新速度,这些速度限制在上面指定最大速度,返回控制信息,进行目标物体跟随。部分程序分析如下:
#PID parameters first is angular,dist
targetDist=rospy.get_param('~targetDist')
PID_param=rospy.get_param('~PID_controller')
self.PID_controller=simplePID([0,targetDist],PID_param['P'],PID_param['I'],PID_param['D'])#第一个参数是角度目标,第二个参数是目标距离
rospy.on_shutdown(self.controllerLoss)#当进程被Ctrl+C终止时调用此方法
def trackerInfoCallback(self,info):#目前不处理来自对象跟踪器的任何信息
rospy.logwarn(info.data)
def positionUpdateCallback(self,position):#每当接新数据。然后它将更新电机
#if(not(self.active)):#如果不活动,将立即返回,不做任何事情
angleX=position.angleX
distance=position.distance
rospy.loginfo('Angle:{},Distance:{},'.format(angleX,distance))
#调用PID控制器来更新它并获得新的速度
[uncliped_ang_speed,uncliped_lin_speed]=self.PID_controller.update([angleX,distance])
#将这些速度限制在小于上面指定的最大速度
angularSpeed =np.clip (-uncliped_ang_speed,-self.max_speed,self.max_speed)
linearSpeed =np.clip (-uncliped_lin_speed,-self.max_speed,self.max_speed)
4 测试结果
启动小车底盘、小车雷达后,在小车雷达前方站一个人,距离为根据程序设置的距离,开启小车自动跟随功能,小车可跟随前方的行人向前行驶,行人在改变方向行驶,小车也可以跟随行人改变行驶方向跟随行驶,所以本设计符合设计要求。但人不能过快地移动,一旦超出程序设置的距离,小车将选择跟随在其范围内的其他物体或人。测试图如图11所示。
图11 测试图
猜你喜欢
农业工程学报(2022年4期)2022-04-24
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
智族GQ(2019年9期)2019-10-28
农产品市场周刊(2016年43期)2016-12-23
农产品市场周刊(2016年43期)2016-12-23
汽车观察(2015年10期)2016-04-06
电脑爱好者(2016年6期)2016-04-01
中学生博览(2015年18期)2015-11-06
