多智能体弱刚性编队控制器设计
2021-08-04 08:56杨秀霞
兵器装备工程学报 2021年7期
杨秀霞,严 瑄,张 毅
(海军航空大学, 山东 烟台 264001)
1 引言
编队控制是多智能体系统领域中研究最为广泛的问题之一,其主要目的是驱动智能体使得系统达到期望的状态。根据智能体的感知能力和拓扑结构,编队控制可以分为基于位置的控制、基于位移的控制以及基于距离的控制[1-2]。
在基于距离的编队控制中,所有智能体不需要任何全局坐标信息或任何坐标系对准来实现所提出的控制。只需要通过智能体间的距离来确定所需的编队队形,这就要求多个智能体之间的连接必须是刚性的[3-5]。在文献[6]中,给出了基于梯度的控制策略,以实现刚性编队的形成。在文献[7]中,提出了一种基于Henneberg顶点加法的控制策略,以实现最小刚性编队的形成。然而,队形刚性需要知道大量的距离约束,在实际应用中,这种要求并不容易得到满足。为了减弱刚性的条件,文献[8]提出了一种新的刚性概念——弱刚性。弱刚性编队除了考虑距离约束之外,还引入了一些角度约束。因此,即使从刚性的观点来看编队是非刚性的,该编队也可以进行刚性变换。弱刚性是用来判断附加角度约束的非刚性编队能否保持其队形(刚性)。文献[9]把成对的、相对位移的内积约束替换成角度约束,可以更加方便地描述编队的弱刚性。并且提出了基于梯度的控制律,用于生成无穷小弱刚性编队。该控制律针对的是一组单积分模型的智能体,没有考虑系统中智能体的速度等状态量。文献[10]引入了二维空间中框架弱刚度矩阵和无穷小弱刚性的新概念,用弱刚度矩阵直接检验框架是否为无穷小弱刚性。并将这些新概念应用于一个具有梯度控制律的三智能体编队控制问题。文献[11]提出了广义刚性和广义无穷小刚性的概念,这些概念适用于二维和三维空间。将广义无穷小刚性应用于二维和三维空间中含有n个智能体的编队控制问题,证明了广义无穷小刚性编队局部渐近收敛到期望的队形。文献[9-11]只是研究了无穷小弱刚性编队的控制问题,并没有考虑一般情况下弱刚性编队的控制问题。
本文设计了一种弱刚性编队控制器,适用于所有的弱刚性编队(包括无穷小弱刚性编队)。所提控制器能够在维持编队结构稳定的同时,最大限度地减少编队内部的信息交互量,降低通信复杂度,减少通信能量消耗;同时本文被控对象的系统动力学模型是二阶系统,实际应用范围更加广泛。
2 问题描述
2.1 刚性理论
有n个顶点和m条边的无向图可以表示为G=(V,E),其中V={1,2,…,n}和E⊆V×V分别表示顶点集合和边的集合。本文考虑的图均是无向图,即边(i,j) 和边(j,i)是一样的。关联矩阵H=[hij]∈Rn×m的行和列分别对应图G的顶点和边。为了方便研究,本文引入有向图的关联矩阵H。 在关联矩阵H中,边(i,j)∈E对应的列第i行为1 、第j行为-1,其余位置元素均为0。
在d维空间中,通过分配每个顶点一个坐标pi∈Rd,i∈V,图G可以用来描述多智能体编队。刚性理论研究图G(多智能体编队)是否能进行刚性变换(平移、旋转、反射)。


(1)
式(1)中,||eij||表示顶点i和顶点j之间的欧式距离。刚度函数gG(p)是认识框架(G,p)的关键。
2.2 弱刚性理论


图1 2种不同类型的框架示意图

(2)

2.3 模型建立
在d维空间中考虑n个双积器模型的智能体为:
(3)
式(3)中:pi∈Rd表示全局坐标系∑g中智能体i的位置;vi∈Rd表示全局坐标系∑g中智能体i的速度;ui∈Rd表示全局坐标系∑g中设计的加速度输入。
假设每个智能体的方位不需要与全局坐标系保持一致,则∑local(i)表示智能体i的局部坐标系。通过采用上标表示坐标系,智能体的双积器模型可被写为:
(4)
系统中智能体间的通信拓扑用无向图G=(V,E)来表示。假设每个智能体以自己的局部坐标系为基准,测量其邻近智能体的相对位置,以下测量可通过智能体i∈V得到:
(5)
Ep*,v*={[pT,vT]T∈R2nd:(pj-pi)T(pk-pi)=
(6)
下面对双积器模型智能体的队形形成控制问题陈述如下:

3 控制器设计
3.1 编队控制律设计
由于编队的通信拓扑是由弱刚性图Gw=(V,Ew)给出,编队控制律需要考虑成对的相对位移的内积约束,因此刚性编队的梯度控制律无法直接应用到弱刚性编队中,本文设计了一个类梯度控制律。
定义一个局部类梯度函数:
(7)
式(7)中:kp>0;kv>0;γ是满足假设2.1的函数。
假设3.1:函数γ∶R→R+,满足下面2个条件。
1) 正定:γ(x)≥0,对∀x∈R当且仅当x=0时,γ(x)=0;
2) 解析:在0的邻域U0内,函数γ是解析的,基于函数ψi,智能体i的控制律可以被设计成:

(8)
(9)
(10)

(11)
(12)

(13)

(14)
根据式(11)、式(12)、式(13)和式(14),控制律(8)可以写成:

(15)
式(15)可以简写成式(16),即:
ui=-▽piψi(pi,…,pj,…,pk,…vi)-
kv▽viψi(pi,…,pj,…,pk,…vi)
(16)
3.2 稳定性分析
定义一个全局性类梯度的函数:
(17)
多智能体系统的运动学可被描述为一个哈密顿系统,即:
(18)
定义一个梯度系统:

(19)

(20)

定义一个全局性的梯度函数:
(21)


(22)

(23)
(24)

(25)
由式(25)可以推出:

(26)
式(26)中:
梯度系统(22)在连接空间可以表示为:
(27)
定义李雅谱诺夫函数:
(28)
(29)
由式(26)、式(27)和式(29),可知式(28)对时间求导可得:
(30)

定义3.1假设函数f∶D⊆Rnf→R在z∈D的邻域内是解析的,则在z的某些邻域内存在常量kf>0 和ρf∈[0,1)使得式(31)成立。

(31)
由定义3.1可以得到推论3.1。

(32)
(33)
(34)
(35)

(36)
(37)
(38)
综上可知,对于哈密顿系统(18) 集合Ep*,v*是局部渐近稳定的。
4 仿真验证


图2 由文献[6]得到的刚性编队队形示意图

图3 本文算法得到的弱刚性编队队形示意图
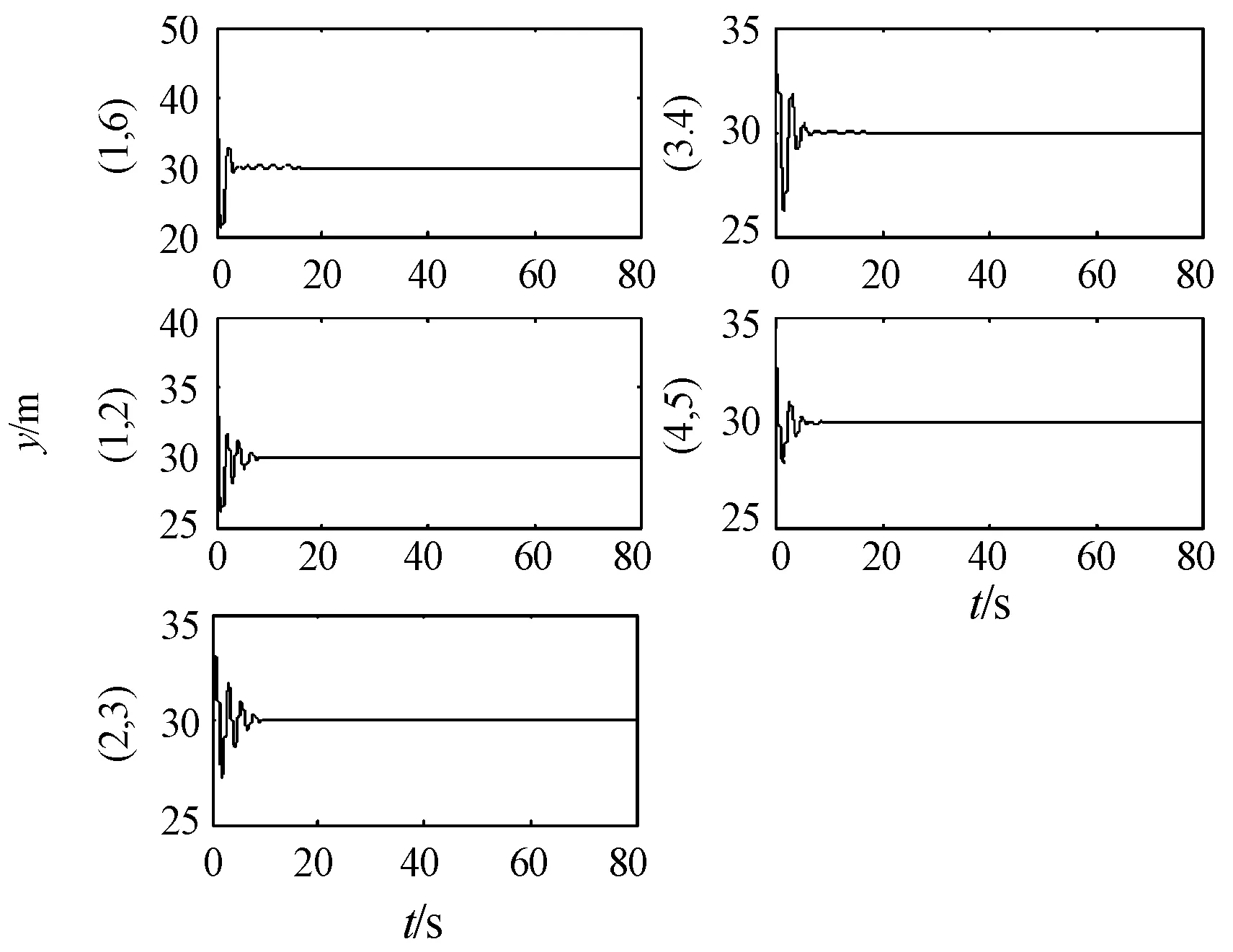
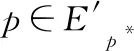
图4 弱刚性编队中边渐近收敛到30
对比图2和图3,刚性编队需要的边数为9个,弱刚性编队只需要5个,本文设计的控制器需要知道更少的边来形成期望编队队形。图5和图6表明各智能体的速度趋近于0,有利于编队的队形保持。
图5 智能体x轴方向速度趋向于0

图6 所有智能体y轴方向速度趋向于0
5 结论
本文研究了二维空间弱刚性编队队形生成控制器,该控制器有效减少了编队中通信边的数量。将多智能体的运动学模型描述为一个哈密顿系统,利用哈密顿系统的性质简化了系统稳定性的分析。相比于生成刚性编队的控制器,本文所设计生成弱刚性编队的控制器需要更少的信息交互,而且不需要全局坐标信息或坐标系对准即可实现对编队的控制。另外,本文设计的控制器对所有弱刚性编队均可适用,提升了应用范围。
猜你喜欢
宇航材料工艺(2022年3期)2022-07-15
九江学院学报(自然科学版)(2022年2期)2022-07-02
当代陕西(2022年5期)2022-04-19
北京汽车(2021年3期)2021-07-17
科学导报·学术(2020年26期)2020-10-21
作文大王·低年级(2019年6期)2019-08-01
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
福建基础教育研究(2019年3期)2019-05-28
西部资源(2018年1期)2018-11-01
妇女(2018年7期)2018-09-19