
基于隧道磁阻效应微陀螺双闭环驱动电路研究
2021-08-16 08:27郭春宏辛晨光李孟委
仪表技术与传感器 2021年7期
金 丽,郭春宏,易 进,张 瑞,辛晨光,李孟委
(1.中北大学仪器与电子学院,山西太原 030051;2.中北大学前沿交叉科学研究院,山西太原 030051;3.中北大学,仪器科学与动态测试教育部重点实验室,山西太原 030051;4.中北大学信息与通信工程学院,山西太原 030051)
0 引言
近些年来随着MEMS技术的快速发展,微机械陀螺以其体积小、功耗低、成本低、灵敏度高、可集成化等优点,广泛应用在电子、汽车、工业控制系统和惯性导航等方面[1-4]。因此需要具有更高灵敏度、更低噪声的MEMS陀螺[5-7]。为了提高MEMS陀螺的性能,很多小组相继开展了对MEMS陀螺微弱科里奥利力检测的研究。大多数MEMS陀螺通常采用电容式[8-9]、压电式[10-11]或是压阻式[12-13]等来实现,电容式陀螺发展较为成熟,但由于易受电磁干扰,其灵敏度已达到其极限水平;压电式陀螺由于偏置稳定性和校正速度影响不利于连续性测试;而压阻式陀螺其固有的温度效应使得灵敏度很难提高。
为了进一步提高MEMS陀螺的灵敏度,提出基于隧道磁阻效应(TMR)微机械陀螺结构。由于受工艺以及材料随温度的变化情况因素影响,造成微陀螺的谐振频率发生改变,进而驱动位移发生变化,最终导致陀螺灵敏度漂移和测量稳定性下降等后果。另外,当陀螺驱动模态稳定在谐振点时,为提高陀螺的抗干扰能力,需要使驱动模态的幅值保持恒定。因此,许多小组提出一些方法对陀螺的驱动模态进行精准的测量与控制[14-18]。比如,提出采用自动模态匹配控制的方法来消除温度对陀螺模态匹配的影响[14],利用数字式微机械陀螺驱动闭环控制系统来提高微机械陀螺的检测灵敏度[16]以及采用模糊控制的方法对幅值进行恒定控制[17]等。
本文在对隧道磁阻效应微陀螺驱动系统理论研究的基础上,提出一种基于自动增益控制和锁相环的双闭环驱动回路。在微机械陀螺驱动模态幅频和相频特性分析的基础上,采用Simulink搭建了双闭环驱动控制回路模型。当驱动模态的幅值和微陀螺的固有频率发生变化时,采用双闭环驱动电路系统可以很快地达到平衡,幅值和频率达到稳态的振荡时间分别为20 ms和50 ms,远小于传统闭环驱动电路的响应时间,验证了设计方案的可行性。
1 隧道磁阻微陀螺双闭环驱动理论分析
1.1 隧道磁阻效应微陀螺工作原理
基于隧道磁阻效应面内微陀螺结构主要由两部分组成,如图1所示。上层表示MEMS陀螺的结构层,驱动导线和通电线圈均布在陀螺结构的表面,通电线圈在驱动方向将产生均匀磁场,在检测方向产生具有高变化率的磁场。下层表示衬底层,2个驱动磁体位于衬底层的两侧,在驱动方向上提供匀强磁场,感应磁场变化的隧道磁阻器件(TMR)置于衬底层中间,其感应磁场沿y轴方向。当在驱动导线电极上施加电压时,微陀螺结构(包括驱动质量块和检测质量块)在电磁力驱动作用下,沿x轴方向做往复运动。如果在z轴方向上有一角速度Ω,检测质量块和通电线圈在科里奥利力作用下沿y轴方向移动。隧道磁阻效应是指发生在铁磁-绝缘体薄膜-铁磁间的隧穿效应,当绝缘层足够薄时,电子可从一个铁磁体隧穿至另一个铁磁体,从而改变磁性材料的电阻。由于磁阻结对磁场的微弱变化具有很高的灵敏度,所以利用此特性可用于对微弱科里奥利力的检测。由于隧道磁阻器件对y轴方向上磁场的微弱变化具有较高的灵敏度,所以在科里奥利力作用下检测方向产生的位移将直接影响TMR器件所感知的磁场大小,进而改变TMR器件的电阻值。因此,隧道磁阻微陀螺的角速度Ω大小可通过测量TMR器件的输出电压获得。

图1 隧道磁阻微陀螺结构原理图
1.2 隧道磁阻效应微陀螺驱动理论分析
根据隧道磁阻效应微机械陀螺的工作原理,其等效动力学模型如图2所示。若质量块在x方向受到周期性作用力Ft=Fsinωt的作用,可以得到驱动方向的动力学方程为

图2 隧道磁阻微陀螺等效动力学模型
(1)
式中:mx为驱动质量块的质量;cx为驱动模态的阻尼系数;kx为驱动模态的弹性系数;ω为驱动力的频率。
通过求解微分方程(1)可得驱动位移表达式为
(2)

由式(2)中可以看出,第一项表示为指数衰减的瞬态项,当微陀螺工作在稳态下,可以将瞬态项去除,只留下起作用的稳态项,因此在稳定情况下驱动模态的振动位移表示为
x(t)=Bxsin(ωt-φx)
(3)
式中,驱动质量块振动幅值和相位分别表示为:
(4)
(5)
式中Bf为驱动信号的幅值。
根据幅值式(4)及相位式(5)进行幅频特性和相频特性仿真,结果如图3所示。

(a) 驱动模态的幅频特性曲线

(b) 驱动模态的相频特性曲线图3 驱动模态的特性曲线
由图3所示的幅频和相频特性曲线可知,当驱动信号的频率与驱动模态固有频率相等时发生谐振,此时振动位移最大,且此时激励信号和激励响应信号间的相位差为-90°。由于驱动质量块振动幅值Bx及频差(ω-ωx)将直接影响陀螺结构灵敏度,为了使得陀螺具有更高的灵敏度,通常将驱动信号的频率设置在其固有频率位置处。但是由于外界温度或者其他因素影响,陀螺固有频率的变化将直接导致陀螺灵敏度的变化,影响陀螺的测量精度,因此对陀螺驱动频率进行闭环控制成为了必然。除此之外,为了提高陀螺的抗干扰能力,使驱动模态的振动幅值保持恒定或者是可快速恢复到目标值,则需要进行稳幅控制。所以,下面将介绍采用双闭环驱动电路系统的设计,包括基于自动增益控制(AGC)的稳幅控制和基于锁相环(PLL)的驱动频率控制。
2 双闭环驱动电路系统设计及分析
2.1 双闭环驱动电路工作原理
文中设计了基于AGC-PLL双闭环驱动控制电路,基本原理图如图4所示。该控制系统主要分为2部分,一是微机械陀螺的驱动模态模型,其中KνF表示驱动电压在驱动导线上产生的安培力之间的比例大小,Kxν表示驱动反馈导线位移与动生电动势之间的比例关系。二是AGC-PLL双闭环驱动控制环路。在频率控制环路中,驱动反馈信号与驱动信号的相位差信息通过相位调制解调获得,经低通滤波后输入到压控振荡器中,最终压控振荡器输出一个频率可控的驱动信号(压控振荡器的输出频率大小等于振荡器的中心频率与控制电压与频率控制系数乘积之和)。而驱动反馈电压的稳幅控制通过自动增益环路来实现,自动增益控制是一种使放大电路的增益自动地随信号强度调整的自动控制方法。在驱动控制电路系统中,驱动反馈信号经运放电路后进行幅度正交解调得到驱动反馈信号的幅值,经低通滤波器处理以后,驱动反馈幅值信号与参考信号Ar进行比较之后得到幅值误差信号,通过PI控制器对幅值进行自动增益调节,调节后的幅度信号与PLL输出的振荡信号通过乘法器做积,作为微机械陀螺驱动模态的激励信号。这样在频率和幅度控制上形成一个双闭环控制,当实际的驱动频率和模态的固有频率不匹配时或是实际幅值与目标幅值不一致时,通过整个负反馈环路可实时地进行调节。
2.2 双闭环驱动电路Simulink仿真与分析
为了对陀螺双闭环驱动控制进行系统级仿真验证,搭建了隧道磁阻微陀螺AGC-PLL双闭环驱动系统Simulink模型,如图5所示。整个模型分为以下3个部分:第一部分是根据微机械陀螺驱动模态的动力学方程搭建的陀螺驱动模拟模块,该模块是1个二阶系统。第二部分是陀螺驱动模态的幅度控制模块,该部分主要包括基于正交解调的鉴幅器及PID控制等部分,其中用于正交幅度解调的两路解调信号相位相差90°。该环路主要是对陀螺谐振时质量块的振动幅值进行控制。第三部分是陀螺驱动模态的频率控制模块,该部分采用乘法器和低通滤波器实现对陀螺输入信号和输出信号的相位鉴别,经PID后的误差信号输入控制压控振荡器,压控振荡器VCO的输出作为驱动的激励信号。此环路的作用是为了保证驱动信号的频率能够实时与陀螺驱动模态的固有频率相同,以保证获取最大的结构灵敏度。

图5 隧道磁阻微陀螺双闭环驱动系统Simulink模型
利用Simulink模型完成微陀螺闭环控制系统的仿真,仿真结果如图6所示。图6(a)表示驱动信号稳幅的控制结果,从图中可以看出,当处于稳定振荡状态时,其幅度为一常数。当由于外界因素引起幅度变化时,幅值又会很快地达到稳定,其振荡时间约为20 ms。图6(b)表示利用锁相环稳频控制的结果,图中数据表示压控振荡器的控制信号。当实现闭环稳频控制时,压控振荡器的控制信号为一常数。从结果中可以看出,当经过50 ms后达到稳态。并且当驱动信号频率大于或者低于驱动模态固有频率时均可以实现较快的调节,使驱动信号的频率与陀螺驱动模态的谐振频率进行匹配。

(a) 稳幅驱动控制
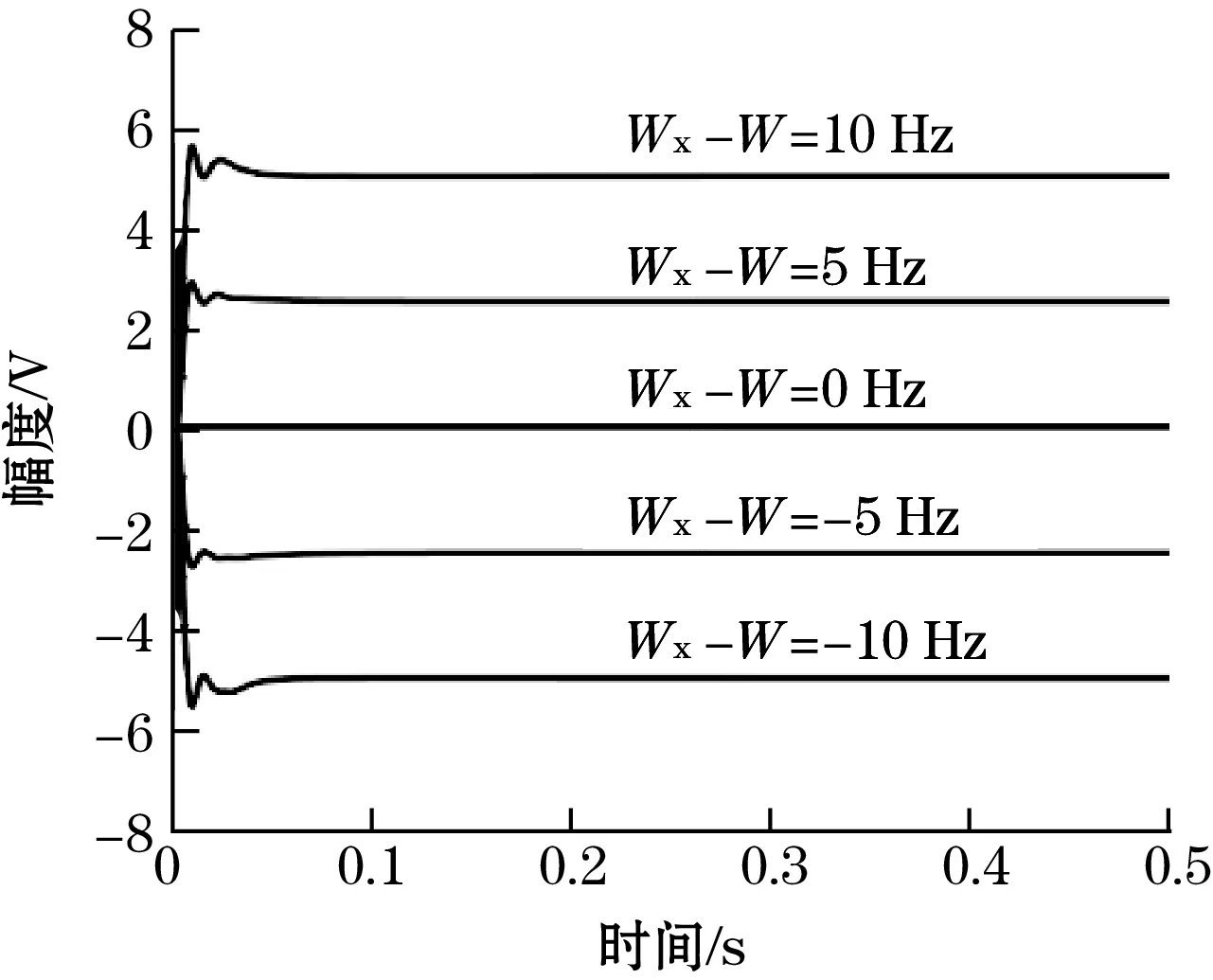
(b) 稳频驱动控制图6 双闭环驱动控制系统Simulink仿真结果
3 结束语
为了解决微机械陀螺灵敏度漂移和测量稳定性下降等问题,本文提出了一种基于自动增益控制和锁相环的双闭环驱动回路方案。通过对微机械陀螺驱动模态的幅频和相频特性曲线研究的基础上,分析采用双闭环驱动控制的必要性。在介绍锁相环和自动增益控制工作原理的基础上,建立了Simulink系统级仿真模型,结果表明利用AGC-PLL双闭环控制系统可实时实现稳幅控制和频率锁定,幅度和频率达到稳态振荡时间可降低至ms量级。该驱动电路为进一步提高陀螺灵敏度和测试精度有着重要意义。
猜你喜欢
防爆电机(2021年4期)2021-07-28
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
电子制作(2016年11期)2016-11-07
电机与控制应用(2015年2期)2015-03-01
电机与控制应用(2015年1期)2015-03-01
