
综采工作面采煤机自动拖缆系统研发及应用
2021-08-17 10:25谷彬
煤炭工程 2021年8期
谷 彬
(神东煤炭集团有限责公司 榆家梁煤矿,陕西 榆林 719315)
我国绝大多数煤矿综采工作面使用采煤机开采[1],在采煤过程中,采煤机电缆及水管路随采煤机往返运动,在采煤机多次短程往返、尤其是斜切进刀过程中,电缆夹容易在垂直方向上发生多次弯折叠加,不仅使得电缆夹滑出电缆槽引起过度磨损或挤伤,而且也会使得采煤机“马鞍架”无法顺利通过,特别是在薄煤层,支架没有足够的降架空间,导致支架无法顺利拉架和推溜[2-4]。目前,综采工作面采煤机电缆管理主要靠人工处理,劳动强度大,且处理频次高,不利于煤矿实现安全、高效开采[5]。
为了解决综采工作面采煤机多次往返运行导致供电电缆多层叠加的问题,国内外诸多科研院所和企业研发了多种自动拖缆装置,波兰Famur公司研发了一套链传动系统的拖缆装置,链条拖动拖缆小车拖拽采煤机电缆自动跟随采煤机运行。尹朝阳[6]研发了一种采用无极绳原理的拖缆系统,采煤机掉头时,采煤机处的管缆和拖缆绳(链)拖拽更加顺畅。徐向东[7]研发的拖缆系统不仅建立了采煤机电缆拖拽的数学模型,而且也对设备的选型进行了比较详细的描述。杨立[8]研发的拖缆实验台采用速度控制和转矩控制实现拖缆小车与采煤机运行相匹配,模拟了井下拖缆运行的工况。上述研究工作促进了采煤机自动拖缆技术的进一步发展,拓宽了拖缆装置研发的思路,但是当前的自动拖缆技术比较分散,没有系统性的给出自动拖缆系统的设计、研发方法,缺少井下复杂工况运行的试验支撑。笔者将根据自动拖缆运行的特点,结合现代矿井自动化、智能化发展的需求[9],对综采工作面自动拖缆系统总体结构方案、系统设计、关键技术研究展开论述。
1 工程背景及运行原理
1.1 工程背景
自动拖缆系统涉及到自动控制、远程通信、系统融合等技术,对工作面自动化、智能化程度要求比较高,笔者以国家能源集团神东榆家梁煤矿43102工作面为依托,开展技术研究。榆家梁43102工作面应用了三维地质模型构建、无人巡检、生产控制、智能协同联控等关键技术,属于第3代智能化工作面[10]。43102工作面位于4-3煤,工作面长度340.45m,推进长度2191m,起伏角度不大于9°,一般为3~5°,可采储量207万t,平均采高1.45m,属于中薄型煤层,配套MG2×250/1200-WD1 型采煤机、SGZ800/1400型刮板输送机、ZY9200/09/18D型液压支架(中部)。
1.2 拖缆系统运行原理
本系统的工作原理是利用动滑轮的特性,采煤机电缆夹缠绕在拖缆小车的拖缆滚轮上,控制系统实时读取采煤机的运行方向、速度、位置等相关技术参数,控制拖缆驱动部运行,动力传输选择非常适合矿山长运距、重载运行的链条传输动力[11,12],实现拖缆小车和采煤机实时同步跟随,二者之间一直保持方向一致、速度V拖缆=V采煤机/2的关系,始终保持采煤机电缆具备恒定的张力,不发生二次折弯。运行原理如图1所示。

图1 拖缆系统运行原理
2 机械系统
2.1 总体结构
为了适应工作面整体配套,自动拖缆驱动部布置在工作面机尾段,从机头到机尾运行为拖缆状态,机尾到机头为放缆状态。机械系统主要包括驱动部、尾回转部、电缆槽、驱动链、拖缆小车、链张紧系统等,总体方案如图2所示。

图2 机械系统总体方案
1)驱动部。驱动部采用水平布置方式,即电机平行于工作面。传动系统选择电机与减速器一体式的减速电机,电机自带编码器。驱动链轮与减速电机通过扭矩轴连接,链轮体采用高强度合金钢锻造成型,机架焊接成型,与刮板输送机联接,驱动部总体结构如图3所示。

图3 驱动部总体结构
2)尾回转部。尾回转部安装在输送机中间部位的电缆槽中,可在一定长度的轨道槽内滑动,与驱动部链轮一起共同起到回转链条的作用。
3)电缆槽。电缆槽集电缆管理、拖缆小车运行、驱动链运行于一体,不仅做为电缆、水液管路、信号线等的存放空间,而且是拖缆小车和驱动链条的运行通道。
4)拖缆小车。拖缆小车是拖缆装置的动作执行机构,传动装置输出的动力通过链条传递到拖缆小车上,再由拖缆小车拖动电缆夹在电缆槽内定向运动。
5)链张紧系统。链张紧系统通过液压系统控制液压缸调整尾回转部的位置,从而达到调节链条松紧程度的目的,为了输出恒定的张力,工作过程中液压缸处于实时张紧状态[13]。
2.2 主要技术参数
依据拖缆力计算公式[14]:
Ft=2(qμl+Fc)+Fj+FL
(1)
式中,Ft为拖缆力,N;Q为电缆夹组件重量,N/m;M为电缆夹组件摩擦系数;L为拖动长度,m;Fj为拖缆架摩擦力,N;FL为驱动链摩擦力,N。
计算可得拖缆力Ft=49kN。系统装机功率:
P=FtVt/(kη)=14.7(kW)
(2)
式中,Vt为拖动速度,取Vt=0.18m/s;K为裕度系数,取η=0.7;H为传动效率,取η=0.86。
取装机功率为15kW。拖缆系统技术参数见表1。

表1 拖缆系统主要技术参数
2.3 拖缆系统中部配套
拖缆系统中部电缆槽与刮板输送机中部槽联结,拖缆小车的运行轨道在电缆槽上,拖缆链道与电缆槽为焊接一体结构,由于43102工作面平均采高只有1.45m,煤层最低时为1.2m,为了尽可能降低配套空间,拖缆链道布置方式采用拖缆链道垂直布置,其配套方式如图4所示。

图4 拖缆中部配套
3 电控系统
电控系统包括井下就地控制系统和远程监控系统两部分。井下就地控制系统主要对采集到的采煤机数据进行分析、判断,处理,并通过一定的控制算法控制变频器输出,控制拖缆小车同向、半速跟随采煤机运行。就地控制系统设有压力、位置、行程等多种传感器,实时监测相关数据,然后反馈到控制系统主站,以便进一步校正与决策。远程监控系统位于井下集中控制中心,实时与就地控制系统进行数据交换,并统一纳入矿井健康管理中心,然后传输到地面分控中心,形成地质、采矿、机电等多源异构信息的实时共享和数据反馈。控制系统结构示意图如图5所示。
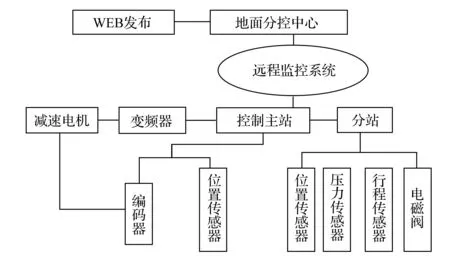
图5 控制系统结构示意图
3.1 硬件系统
3.1.1 控制主站
采用ZDYG127(A)-Z矿用隔爆兼本安型电液控制装置主站,以可编程控制器(PLC)作为核心,配置通信模块、数字量输入输出模块、模拟量输入输出模块,以MEG128为核心的按键通讯板为输入控制器和TPC1261Hii真彩12寸液晶显示屏作为显示系统,按键通讯板负责对键盘和按钮的输入信号进行采集,控制装置主站结构如图6所示。

图6 控制装置主站结构
3.1.2 控制分站
为了便于远端数据采集及现场安装,在尾回转部设置控制分站,用于采集液压缸压力、行程、位置等相关数据,也可控制电磁阀组开启与关闭,实现尾部张紧系统的远程操控。控制分站通过控制总线与主站通信,实现主站统一决策与管理。
3.1.3 变频器及编码器
变频器选择BPJ-45/660K型四象限变频器,采用ABB机芯,工作电压660V,输出频率5~60Hz,带转矩控制功能。电机编码器安装在电机中心轴上,为绝对值型。
3.1.4 传感器
系统用到的传感器主要有位置传感器、压力传感器和行程传感器。位置传感器在工作面多点布置,采用KHC100矿用本安型磁性接近传感器,常开型,动作点距离大于等于100mm;压力传感器采用GDP60型矿用压力传感器,工作量程60MPa,分别率1MPa,串联在油缸进液口上,实时测量油缸有杆腔的压力;行程传感器采用SMW-CTS-D系列磁致伸缩位移传感器,工作量程最大可达2m,供电电压24V,安装在油缸中,可将油缸的行程数据传输到控制分站中。
3.2 软件系统
软件设计包括上位机编程和下位机编程两个部分。上位机采用北京亚控科技组态王6.55进行控制界面组态。设有主界面、参数设置界面、故障查询界面、运行数据界面、曲线显示界面等。
下位机采用PLC进行控制程序设计,用结构化编程方式编程,以功能块为单元进行分类,主程序块ZB1用于整个控制功能的架构管理,其结构层下根据不同功能分为多个功能块,有电机控制功能块KC1、传感器数据采集功能块KC2、通讯功能块KC3以及其它辅助功能块KC4,功能块也可以调用相应功能的子程序。程序功能如图7所示。

图7 程序功能框图
3.3 系统通信及工作流程
系统根据设备的不同性能采用不同的通信协议。主站与变频器、液晶显示器、电机编码器等之间的通信采用RS485通信,主站与从站PLC之间采用CAN通信协议,液晶显示器与按键通讯板采用RS232通讯协议。主站与远程控制系统、远程控制系统与井上分控中心采用工业以太环网通信。通信结构如图8所示。

图8 通信结构示意图
自动拖缆电控系统的控制主站、控制分站、各传感器、远程控制系统及地面分控中心在系统运行时互相协同配合,出现故障时会报警显示,必要时各系统会联合闭锁并停机,其工作流程如图9所示。

图9 电控系统工作流程
4 关键技术及现场应用
4.1 过载保护技术
1)扭矩轴过载保护。在设备过载保护中,机械式保护最直接、最灵敏,尤其是在动力输出开始段,可最大限度的保护设备部件。减速电机与链轮之间采用扭矩轴连接。扭矩轴中间部位段根据计算及实验数据设计环形剪切槽[15]。当负载异常剧增时(比如刮卡),扭矩轴断裂,减速电机空转,设备停止运转。根据轴的扭转强度计算公式:
式中,d为剪切槽最小截面直径,mm;τp为材料许用扭转切应力,取75MPa;T为扭矩轴加载扭矩,N·m,实际中按1.5倍过载计算,取12210N·m。由式(3)计算得d≥91.9 mm,设计中取95mm。
2)电器过载保护。电控系统实时采集变频器输出的电流及电机温度,当电流及温度有一个参数超过预警值时,电控系统发出停机指令,并上传到远程控制系统和地面分控中心进行声光报警。
3)液压过载保护。链条张紧系统采用液压缸实时张紧,在液压缸进液口串联一个压力传感器和溢流阀,当泵站压力异常升高,或链条上的负载急剧增大时,液压缸上的压力相应增大,超过溢流阀卸液值时,溢流阀向外喷液,同时压力传感器上传压力数据,提醒工作人员处理,避免液压缸压力过大而爆缸或者损坏密封。
4.2 转速与转矩协同控制技术
该系统采用变频器转速控制为主、转矩控制为辅的协同控制模式。在放缆阶段,采煤机拖动电缆运行,拖缆小车跟随运行,负载基本恒定,当拖缆系统因链条传动迟缓、数据通信延迟等导致拖缆小车跟不上采煤机运行时,采煤机会对拖缆小车有一定拖动力,此时反馈到变频器上的转矩会相应减小,甚至出现负转矩,控制主机给变频器发加速指令,直到输出转矩达到设定值时,拖缆系统按照半速跟随原则进行跟机运行,控制流程如图10所示。

图10 转速与转矩协同控制流程
4.3 拖缆装置现场应用
该套系统自2020年6月在榆家梁煤矿43102工作面进行工业性试验以来,进行了单机运行调试、变速及超频调试、跟机空载调试、联调联试4个阶段,累计运行调试时间近6个月。在采煤机挂缆联调联试2个多月中,工作面累计推进300m,过煤量近20多万t,经历了老顶来压、周期来压、过上层煤柱、过断层等多种复杂工况的考验,目前设备运行平稳,电缆自动拖拽灵活、可靠,完全可以代替人工实现现场采煤机电缆管理,达到了设计要求;同时拖缆小车具有清煤功能,可以自动清理电缆槽里的落煤,减少了人工清煤的劳动强度。
5 结 论
1)以榆家梁43102工作面为应用背景,研发了设备的机械系统,给出了设备总体布置方案,设计了核心零部件,并对其功能及主要作用进行了描述,给出了设备的主要技术参数,设计了拖缆链道垂直布置的配套方案。
2)基于设计的机械系统,研发了电控系统。对控制主站、控制分站、传感器等核心零部件进行了选型,并对软件设计、系统通信进行了详细研究。
3)进行了过载保护技术研究,设计了机械、电器、液压三种过载保护方式,提高了设备运行的可靠性;创新了放缆状态下转速与转矩协同控制模式,提出了以转速控制为主、转矩控制为辅、二者协同控制的控制策略。
4)设备进行了现场应用,经过多种复杂工况的考验,运行比较平稳,达到了设计要求,具备向市场推广的条件。
猜你喜欢
消费电子(2022年6期)2022-08-25
防爆电机(2022年2期)2022-04-26
防爆电机(2022年1期)2022-02-16
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
煤矿机电(2020年5期)2020-11-02
电子制作(2019年23期)2019-02-23
电机与控制学报(2018年9期)2018-05-14
环球市场信息导报(2017年4期)2017-05-18
山东工业技术(2016年16期)2016-08-15
