基于PLC的模糊PID变压器变频冷却系统研究
2021-08-17 15:19曹石曹丽苹安卫超
现代商贸工业 2021年24期
关键词:模糊
曹石 曹丽苹 安卫超
摘要:温度对变压器的稳定性和寿命有较大的影响,目前中大型变压器的散热一般使用风冷强迫油循环的方式。冷却器的运行状态对变压器的散热性能起决定性作用。传统的切换方式一般采用继电器硬触点接触,精度较差,而常规PID控制方法参数一旦设定难以实时根据设备状态进行参数更新,难以满足大惯性非线性系统的需求,因此本文设计了基于PLC的模糊PID控制法变频调节冷却器的运行方案,实验结果可知,该系统运行稳定,通过实时采集变压器顶层油温的温度,使冷却器扇叶转速处于自适应状态,该系统相对常规PID控制法对于大惯性、长时延的非线性控制系统具有较好的控制效果。
关键词:PLC;模糊 PID;变压器冷却
中图分类号:TB 文献标识码:A doi:10.19311/j.cnki.1672-3198.2021.24.080
0引言
由于铁损和铜损的存在,变压器运行中会产生热量,使变压器铁芯、绕组和油的温度升高。变压器对温度极为敏感,温度升高会减少变压器的寿命。根据变压器铭牌使用寿命20年的标定下,要求变压器最热点温度要运行在98°C以下方可满足。当变压器的运行温度每升高6°C其真实使用寿命将会减少50%。因此控制变压器合理的运行温度对于变压器的运行寿命节省有色金属开销来说起到举足轻重的作用,因此必须采用合理的冷却方法。
目前,风冷强迫油循环的冷却方式广泛地应用于中大型变压器的冷却系统中,这种方式多依靠传统继电器的动作或者使用温度传感器采集温度信号后传给PLC设置阈值发出动作信号驱动相关继电器动作来进行冷却器的投切,该方式目前以下几点存在问题:
(1)投切冷却器主要依靠采集温度信号进行硬接点控制,容易使冷却器频繁投切。
(2)冷却器的四种工作状态(即工作、辅助、备用、停用)无法在线设定。
(3)传统继电器元件动作不可靠,容易发生误动作及拒动作,精度低。
(4)冷却器运行采用定频方式,相比变频节能性差。
(5)自动化程度低,需要人为干涉,无法远程监测。
因此笔者制定了基于PLC的变频调节冷却器的运行方案,通过实时监测变压器顶层油温的温度,根据模糊PID的控制原则,实时调节变频器的输出频率,使冷却系统处于最佳的工作状态。
1硬件系统设计
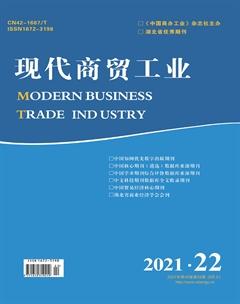
该系统使用西门子公司的S7-200 224 PLC以及SINAMICS G120变频器作为核心,利用 PT00热电阻采集模拟温度信号与智能数字式温度测量仪实时采集变压器油顶部温度。其中PT100为线性温变电阻,以电阻值的变化为温度值的输出为模拟量,但EM235模块作为模拟量输入输出转换单元时,EM235无法直接使用电阻信号,此时应将电阻信号通过温度变送器转换为4-20mA的电信号,方能被EM235模块识别。智能数字式温度传感器使用DS18B20温度传感器,测量结果为数字量,可通过MODBUS总线进行设备间信息通信。SINAMICS G120为西门子公司出品的紧凑型变频器,操作简单方便快速调试。利用Fuzzy-PID算法动态更新冷却器最佳的运行状态。该系统使用双变频器互为冗余备份,提高系统运行的安全性与可靠性,该系统结构如图1所示。
2模糊PID系统设计
由于变压器冷却控制具有系统惯性大、时延长、非线性的特点,很难精确建立数学模型。常规PID控制法虽然应用广泛,控制精度高,但是针对本系统来说控制效果比较差,因为一旦PID参数确定以后,就无法改变,无法满足自适应状态。而使用模糊控制不需要精确的数学模型,且易获得专家知识,并具备较强的推理预测能力。而PID调节可将模糊控制中的稳态误差消除,所以将模糊控制与PID控制两者的优点相结合能极大地提高该系统调节速度及精度以及稳定性。
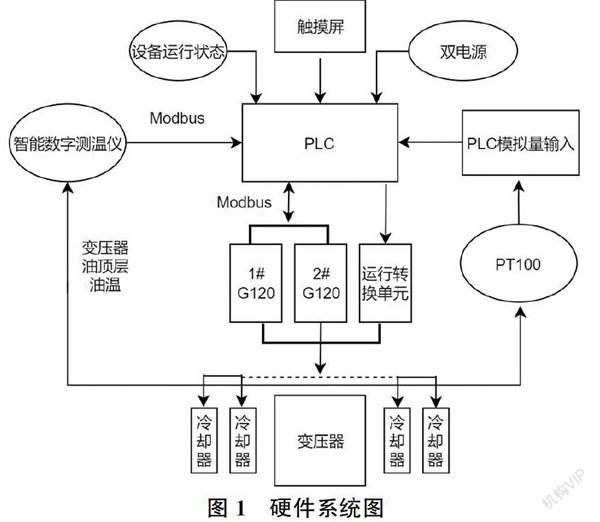
在模糊PID控制系统中,设定值为r(t),输出值为y(t)即变压器顶层油温测定值,r(t)与y(t)的偏差为e(t),ec(t)为偏差变化率。经模糊处理即可得到修正比例系数ΔKp、积分系数ΔKi、微分系数ΔKd,将此三项参数送入至PID控制器即可得到u(t)的输出,再将u(t)的值送入变频器即可精确控制冷却器扇叶的转速,该系统控制流程如图2所示。
2.1输入输出量模糊化
输入量E和EC可经温度传感器采集数据获取,输出量为ΔKp、ΔKi、ΔKd三个PID控制修正参数,选择语言变量{NB负大、NM负中、NS负小、ZO零、PS正小、PM正中、PB正大}共7个描述输入的模糊子集,控制量论域范围{-3、-2、-1、0、1、2、3}。使用计算公式7(E+3)+(EC+3)可得ΔKp、ΔKi、ΔKd的参数。
2.2模糊知识库及推理
模糊知识库是对于复杂系统根据现场人员经验及操作数据,结合当前运行情况总结出来的控制方案。
在本系统中,若輸入量偏差较小,则Kp、Ki应取较大值,以满足系统的稳态性能,选取适当的Kd值提高系统的抗干扰性。
若偏差中等,Kp应取较小值同时选取适当的Ki、Kd值可减小系统的超调量。
若偏差较大时应选取较大的Kp值,Kd值应取小这样可提高系统的响应速度,同时应该消除积分环节防止积分过饱和,因此Ki取0。
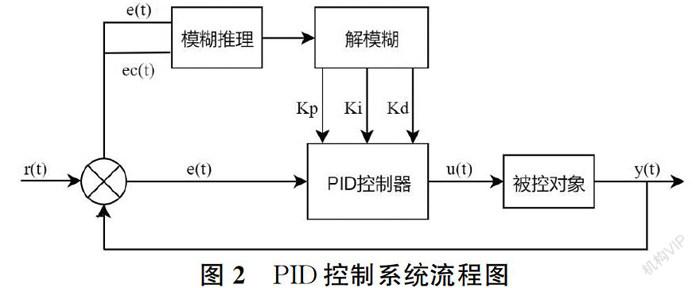
使用MATLAB7.0软件输入fuzzy命令,进行输入量输出量的建立。输入量为E与EC,输出量为三个PID修正参数,图3为控制变量在Matlab中的设置。
选中输入输出量可建立模糊控制规则,该系统模糊控制规则为:if e=NB and ec=NB then Kp=PB and Ki=NB and Kd=PS。
解模糊即利用最大隶属度的方法来将模糊控制器输出的模糊值转化为实际输出值。
3控制器设计
常规PID控制法简单易懂便于实现,现已广泛使用,但其参数需手动调整设定,在非线性时变系统中容易产生较大的超调量,响应速度差。因此本设计使用西门子S7-200系列PLC作为主控核心,该PLC为西门子一种小型化可编程控制器,最多可支持8路PID控制回路,具备联网功能,可实现实施较复杂的控制方案。利用与之配套的STEP7软件对模糊控制进行编程处理,完成后即可调整PLC控制器的PID参数,在原有PID参数的基础上加权由解模糊环节输出的3个PID修正值即修正比例系数ΔKp、积分系数ΔKi、微分系数ΔKd,得到最终的PID值。结合D/A转换及变频器最终实现对冷却器的投切及风叶的转速的控制。PID控制器与输出值u(t)的关系为:
猜你喜欢
现代电子技术(2016年23期)2017-01-12
青年时代(2016年19期)2016-12-30
考试周刊(2016年83期)2016-10-31