
负载敏感变速同步驱动原理与特性研究
2021-08-18 01:15丁海港刘永状赵继云
液压与气动 2021年8期
丁海港,刘永状,赵继云
(1.中国矿业大学 机电工程学院,江苏 徐州 221006; 2.江苏省矿山智能采掘装备协同创新中心,江苏 徐州 221006)
引言
液压同步驱动分为闭环和开环两种控制方式。闭环同步驱动主要采用比例阀或伺服阀为控制元件,利用闭环反馈控制,可以在时变负载或大偏载下获得较高的同步精度[1-2],但是系统结构复杂,成本昂贵,控制及维护难度大,主要用于环境良好且控制精度要求较高的场合。目前,分流同步驱动是开环同步的主要形式,其以分流元件(如分流阀、分流马达)为控制元件,通过等量分流原理实现多执行器的同步驱动,具有结构简单、成本低、可靠性高、可适应恶劣环境等优点[3-5]。但目前分流同步驱动的最大问题是同步精度较低,尤其在大偏载或时变负载等工况下同步精度显著降低,甚至失去同步控制功能。
现代工业装备对于高精度、高可靠性、低成本的液压同步控制有广泛需求[6-7],如大型液压卸车平台的举升机构、海上钻井平台的钻杆同步举升机构、雷达天线的液压翻转举升机构等。在工作过程中,这些同步机构的油缸负载具有时变、偏载或突变的特点。采用闭环同步驱动可以获得较高的控制精度,但成本太高,通常是开环控制的10~20倍,甚至更高;采用分流同步驱动可以降低成本,但控制精度和动态性能往往难以满足要求。另外,目前分流元件不具备调速功能,不能在同步过程中改变执行器的速度,无法实现变速同步,这进一步限制了分流同步驱动的应用范围。
针对上述问题,本研究创新分流同步驱动的结构和控制原理,提出一种具有负载敏感功能的高精度分流阀及负载敏感变速同步驱动系统,开展时变负载及大偏载下双缸变速同步控制机理的研究。
1 负载敏感变速同步系统原理
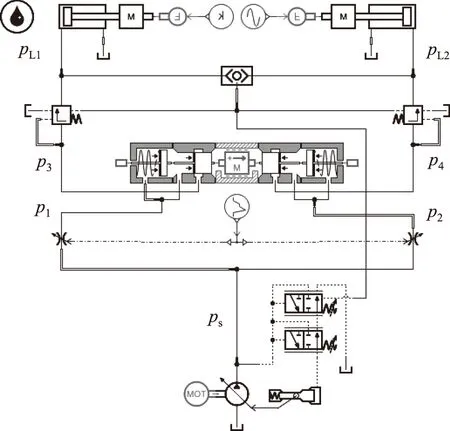
如图1所示,负载敏感变速同步系统主要由负载敏感变量泵、负载敏感分流阀、液压缸等组成。其中,负载敏感分流阀是一种新型的具有负载敏感功能的高精度分流阀,其由可控节流口、流量补偿单元、压力补偿单元、梭阀组成。该同步系统具有以下特点:
(1) 压力补偿单元和流量补偿单元可对负载偏差进行补偿,以消除偏载对分流精度的影响;
(2) 可控节流口由同一个阀芯控制,节流口开度始终相等,改变节流口开度可以调节分流阀的总流量,进而控制执行器速度,以实现变速同步控制;
(3) 通过梭阀取两负载的最高压力并反馈到负载敏感变量泵,在负载敏感控制[8]的作用下,变量泵输出系统所需的压力和流量。

1.负载敏感变量泵 2.负载敏感分流阀 3.可控分流口4.流量补偿单元 5.压力补偿单元 6.梭阀7.液压缸 8.电动机图1 负载敏感变速同步系统原理图
在图1中,pL1和pL2分别为液压缸1,2的负载压力,p1和p2分别为可控分流口1,2的出口压力,ps为系统压力,pLS为梭阀反馈的最高负载压力,两支路的流量分别为:
(1)
(2)
式中,Q1,Q2—— 支路1,2的流量
A1,A2—— 节流口1,2的通流面积
ρ—— 油液密度
C—— 流量系数,一般为0.6~0.8
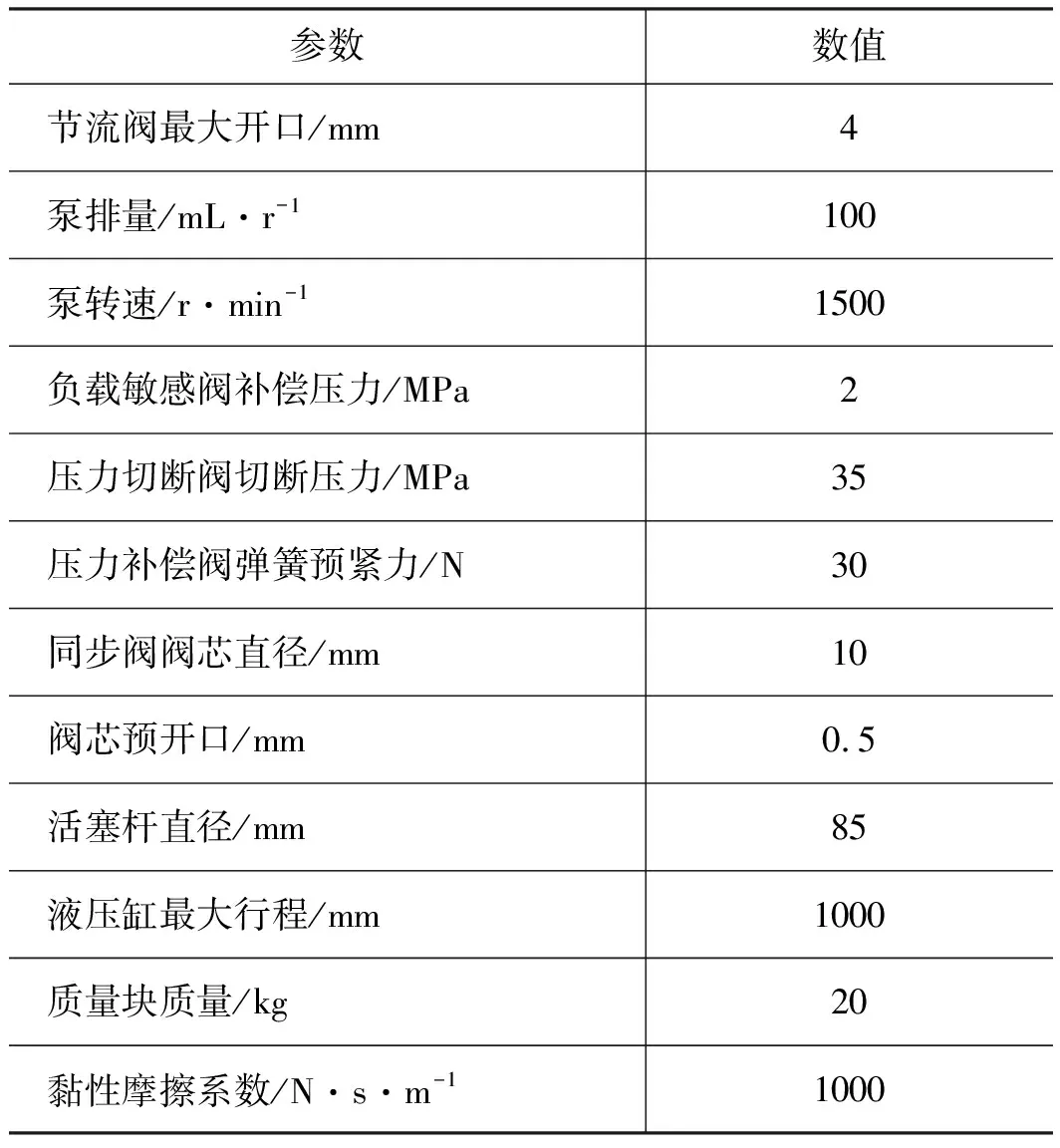
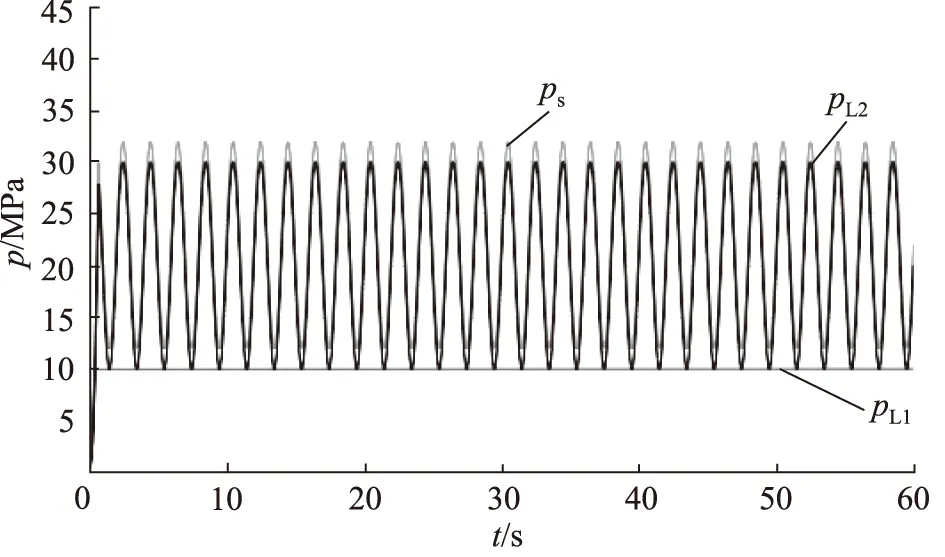
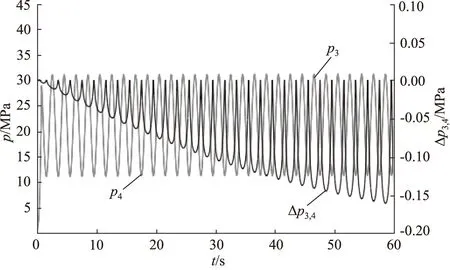
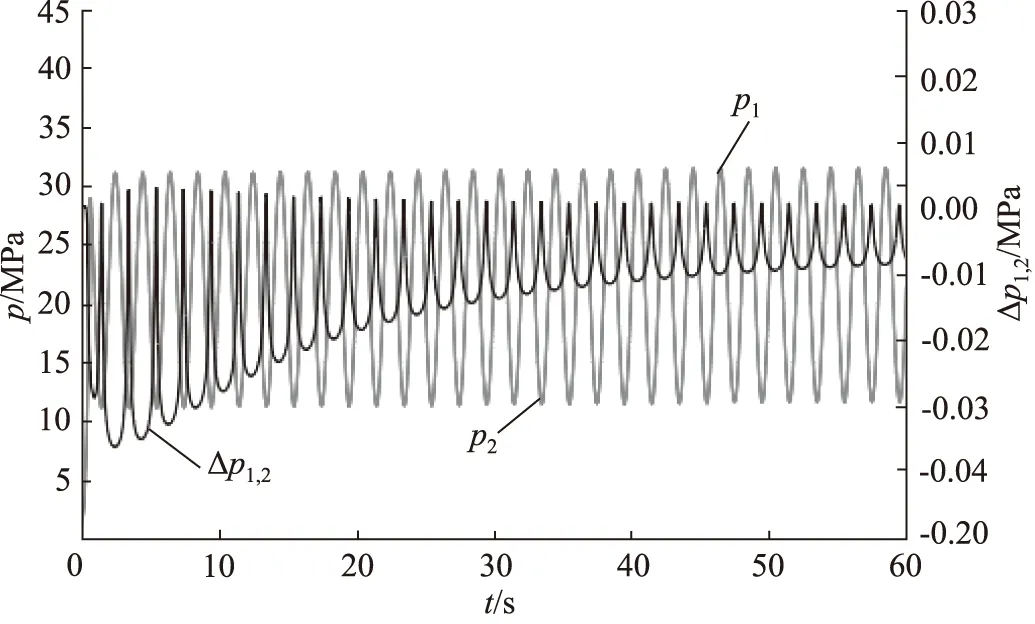
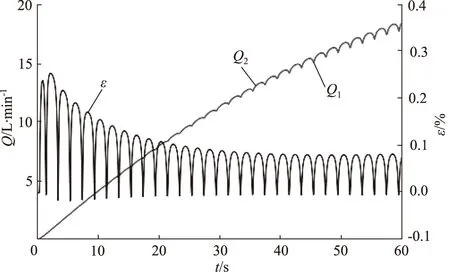
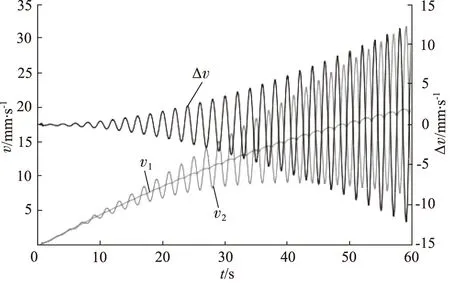
对负载偏差采用阀后压力补偿[9],通过梭阀取最高负载压力pLS,并与弹簧力Fs共同作用于压力补偿单元一端,而压力补偿单元的另一端连接进口。设pL1 (p3-pL2)A3=Fs1 (3) 压力补偿单元2的力平衡方程为: (p4-pL2)A4=Fs2 (4) 式中,A3,A4为压力补偿单元1,2的阀芯面积,且A3=A4。 由式(3)和式(4)知,当弹簧力和阀芯面积相同时,可以保证p3=p4,压力补偿单元实际上起到了负荷均衡器的作用。但是,由于负载压力不同,故2个压力补偿进出口压差有很大的差别,导致压力补偿单元的弹簧力不同,故有p3≈p4,所以压力补偿器并不能完全使偏差负载变为均载。若p3和p4直接作用在可控节流口的出口,则p3和p4的差值就是p1和p2的差值,由式(1)和式(2)知,将导致Q1和Q2有较大的差别,影响分流精度[10]。 为解决此问题,在可控节流口和压力补偿单元之间设置一个流量补偿单元,以进一步减小p3和p4的差别对p1和p2的影响。忽略液动力和摩擦力,流量补偿单元阀芯的力平衡方程为: (p1-p2)A5=kΔx (5) 式中,A5—— 同步阀阀芯截面积 Δx—— 左腔和右腔的弹簧压缩量之差 k—— 弹簧刚度 由式(5)知,流量补偿单元的左右腔的弹簧压缩量之差接近于0,即Δx≈0,故p1≈p2。由式(1)和式(2)知,Q1≈Q2,从而可在任意偏载下实现高精度的等量分流。 根据负载敏感变速同步系统的原理、结构及受力分析,在AMESim仿真平台上建立其仿真模型,如图2所示。除给定的参数设定外,其余的参数均为默认数值,系统的主要参数见表1。在仿真模式下设置采样间隔为0.01 s,仿真时间为60 s,运行仿真并创建结果曲线。 图2 负载敏感变速同步系统模型 表1 系统主要参数 为模拟变速、时变负载、大偏载的工况,设置负载1为恒定负载,其值为10 MPa;负载2为时变负载,呈正弦规律变化,均值为20 MPa,幅值为10 MPa,频率为0.5 Hz;两负载的最大偏差为20 MPa;负载敏感变量泵补偿压力为2 MPa。在双缸驱动的同时改变可控分流口的开度,以调节同步的驱动速度。 负载压力和变量泵出口压力曲线,如图3所示,负载敏感泵的输出压力ps始终比最高负载pL2高出一个恒定值pd,pd为负载敏感泵的补偿压力 2 MPa,与理论分析的结果相符。 图3 负载压力和变量泵出口压力 流量补偿单元、可控分流口的出口压力及差值曲线分别如图4、图5所示,可以看出,压力补偿单元起到了均衡负载的作用,分流节流口的出口压力基本一致,但其差值随着节流口开度的增大而增大。同时,压力补偿单元的进口压力最大有0.16 MPa的偏差,由于流量补偿阀的作用,p1和p2的差值Δp1,2比p3和p4的差值Δp3,4要小的多,故两支路的流量更为接近。 图4 流量补偿单元出口压力及差值 图5 可控分流口的出口压力及差值 分流误差ε为分流阀的主要性能指标[11],即2个工作支路的流量Q1,Q2之差ΔQ与通过分流阀的总流量Qp的比值: (6) 两支路流量和流量误差曲线,如图6所示,在变速、时变负载、大偏载的恶劣工况下,分流阀的分流误差小于1‰,远远低于现有分流阀的误差。液压缸速度及差值曲线如图7所示,具有恒定负载的液压缸1的速度随节流孔开度增大而增大,且波动较小;而具有时变负载的液压缸2的速度呈明显的发散趋势,波动较大。 图6 支路流量和流量误差 图7 液压缸速度及差值 液压缸位移及位移误差曲线,如图8所示,在变速、时变负载、大偏载的恶劣工况下,两液压缸的位移误差e小于1.4%,同步精度较高。利用负载敏感同步控制技术能够实现单泵驱动多执行器的同步控制,使各个执行机构在时变负载、大偏载的恶劣工况下保持高同步精度并保持较高的系统效率。 图8 液压缸位移及位移误差 本研究提出了负载敏感变速同步原理,介绍了负载敏感分流阀的结构和抗偏载原理,并基于AMESim平台建立了系统的仿真模型,在变速、时变负载、大偏载的复杂工况下,考察了新型分流阀的分流误差及其同步系统的同步特性。仿真表明:在变速、变载、大偏载的复杂工况下,新型分流阀具有较高的分流精度,负载敏感变速同步系统也具有较高的同步精度和系统效率。本研究所提出的负载敏感变速同步原理,将有望解决时变负载和大偏载恶劣工况下的双缸变速同步驱动的难题,可取代一部分价格昂贵的闭环同步驱动,丰富液压同步驱动的形式和理论。2 仿真建模
3 仿真分析

4 结论
猜你喜欢
石油矿场机械(2022年5期)2022-10-25
天然气与石油(2020年6期)2021-01-04
冶金设备(2020年2期)2020-12-28
重型机械(2020年2期)2020-07-24
山东化工(2019年12期)2019-07-05
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
中国卫生(2016年12期)2016-11-23
广东石油化工学院学报(2016年6期)2016-05-17
石油化工建设(2015年6期)2015-12-01
