一种基于轨检数据的轨道车辆车体振动预测方法研究
2021-08-21 03:06王玉玲张春杰李晶晶王立江彭乐乐
噪声与振动控制 2021年4期
王玉玲,张春杰,陈 威,李晶晶,王立江,彭乐乐
(1.上海航天设备制造总厂有限公司,上海200245;2.上海工程技术大学城市轨道交通学院,上海201620)
轨道车辆车体振动状态是反映列车安全运营和轮轨接触性能的关键参数[1],也是车身减振和乘坐舒适性评价的重要依据[2]。剧烈的车体振动会产生大量的噪声污染甚至对接触网供电产生影响,同时还会影响车载精密仪器的精度[3–5]。因此,准确预测车身振动加速度是提高列车运行安全性、车辆设备稳定性和乘坐舒适性的前提。同时也对科学评价车辆、轨道的服役状态及精准指导线路养护维修具有重要意义。
然而,车体振动受轨道病害、轨道不平顺、轮轨作用力、车体自身部件(如转向架、电机、制动设备)、车下悬挂设备、车速、载重、外界环境(风速、下雨、地震)等多个因素的影响[6–8],受这种复杂的耦合因素影响,使得较难准确预测轨道车辆车体振动。目前,预测轨道车辆车体振动方法主要可以分为经验预测法[9–10]、数值仿真及分析方法[11–13]和数据驱动预测方法[14–17]。其中,经验预测法主要依靠先前的设计经验及现场设计参数来预测轨道车辆车体振动状态。如:With 等[9]在设计阶段使用EnVib-01 预测模型预测了由轨道车辆运行所引起的周边振动状态;Connolly等[10]提出一种有效范围界定经验模型来预测及评估高速列车振动大小。利用经验法虽然能够实现列车相关振动预测,但是该方法往往会因为经验数据不足以及轨道线路几何等参数的改变造成预测精度较低。数值仿真及分析方法通常通过构建车-轨耦合动力学模型并利用数值求解的方法实现轨道车辆振动的预测。如徐磊等[11]建立传统车辆-轨道动力学模型并施加轨道不平顺激励求得车体振动响应预测,但以经验轨道谱不平顺作为激励难以与现场实际应用达成一致;包学海等[12]依据多体动力学理论、郭训等[13]根据有限元分析理论,分别建立了多种车辆-无砟轨道-路基的耦合振动模型,仿真出不同车速或者不同轨道扣件对车辆加速度的影响。但由于影响车-轨系统参数较多,造成通过精确建立数学模型来分析车体振动较为困难且方法适应性较差。数据驱动预测方法主要是通过分析相关数据,构建预测模型实现车体振动预测。如:Qian等[14]建立了基于神经网络和多体动力学模型的车辆振动加速度预测模型;耿松等[15]建立了轨道不平顺状态下的车辆振动预测神经网络模型;徐磊等[16]建立了基于PCA-SVM 方法的车体振动状态分类预测模型;徐蔚等[17]利用回归树算法实现了车体振动预测。然而这些方法均依赖大量的实验数据来实现特征参数的提取,这就对数据获取及无效数据的剔除带来了挑战。
为了解决经验法中先验数据不足、数值仿真及分析方法中耦合模型复杂和数据驱动预测算法中有效数据获取困难等问题,本文提出一种基于轨检数据的轨道车辆车体振动预测方法。利用归一化和最大信息系数法实现对轨检车日检检测数据的筛选,得到与车体垂向、横向及水平振动相关的检测有效数据集。基于此数据集,采用回归树及袋装回归集成算法,构建基于袋装回归树集成算法的车体振动预测模型,实现轨道车辆车体振动高精度预测。
1 车体振动预测方案
图1给出了基于轨检数据的轨道车辆车体振动预测方案。以GJ-5 型轨检车在广深Ⅱ线工务段所采集的轨道几何及车体振动响应检测数据中的38个检测参数为研究对象,通过利用归一化处理实现多参数量纲归一化,利用最大信息系数MIC(Maximal information coefficient)方法根据由轨检车所测得的38 个检测参数进行计算并获取与车体垂向、横向及水平3个方向相关性高的测量参数,从而实现检测数据的预处理,得到与车体振动相关的有效数据集。基于此数据集,构建袋装回归树模型,实现车体振动预测。
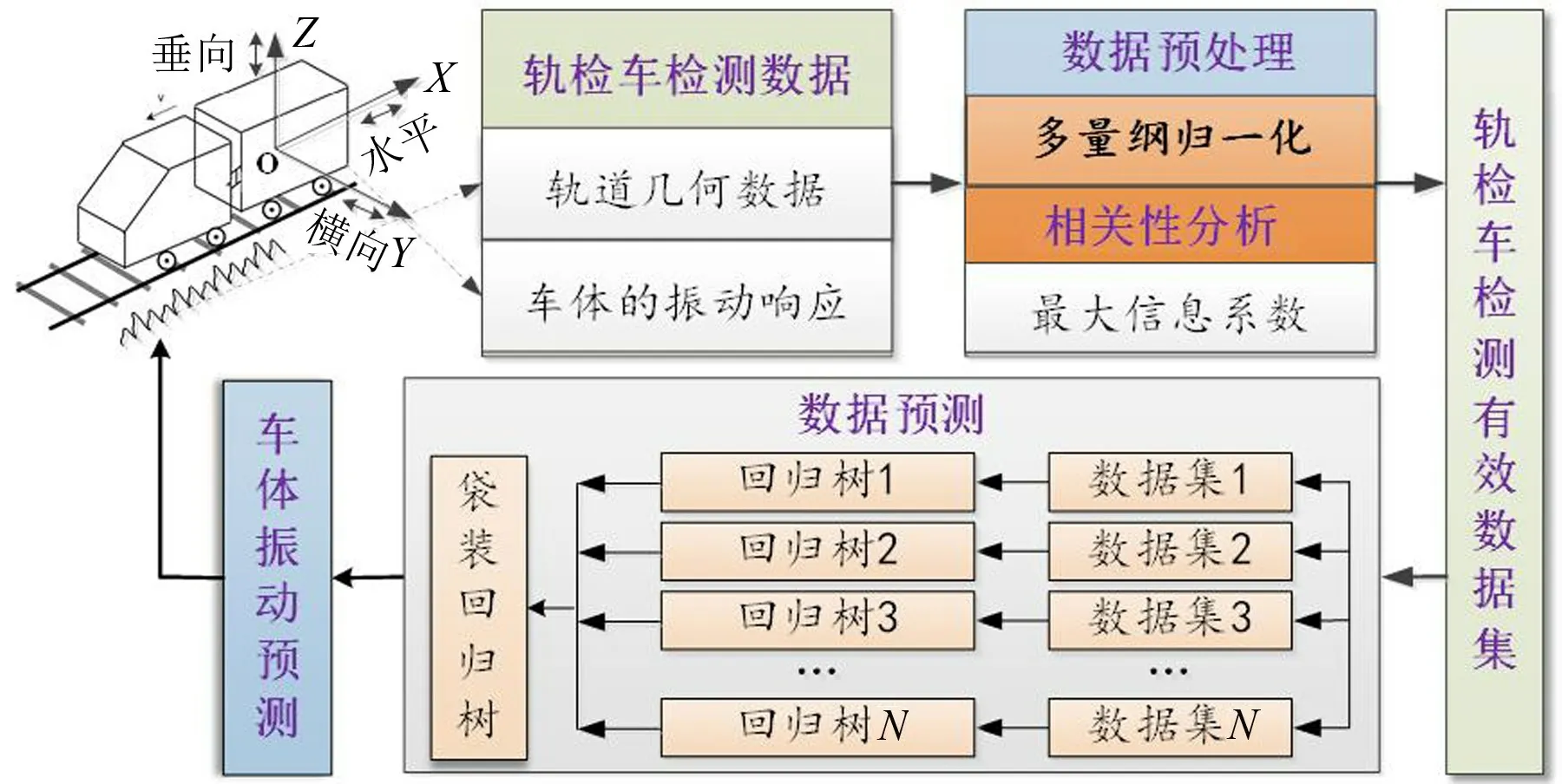
图1 基于轨检数据的轨道车辆车体振动预测方案
2 轨检数据预处理
将GJ-5 型轨检车在广深Ⅱ线工务段所采集的检测数据作为数据源,检测项主要涉及轨道几何参数和车体振动响应两个方面共38个测量参数,测量里程为145 km,其中轨道几何参数检测项目主要包括轨距、轨距变化率、超高、水平、三角坑、曲率、曲率变化率、左右钢轨位移、长波不平顺和短波不平顺;车体振动响应检测项目主要包括摇头速率、车体振动加速度、转向架振动加速度和轴箱加速度。针对轨检车检测参数多且量纲不同的问题,通过归一化处理实现多参数量纲归一化。归一化函数和反归一化函数如式(1)和式(2)所示。
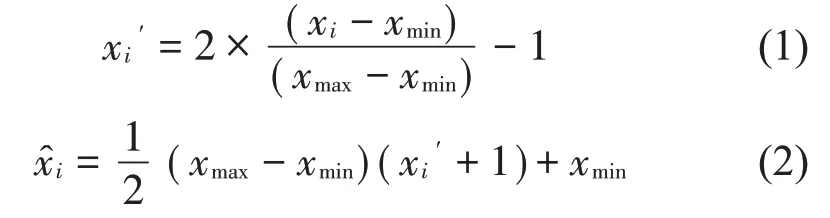
式(2)中:xi′为归一化值,xi为输入值,xmin为输入最小值,xmax为输入最大值为反归一化值。为了剔除无效数据,得到与车体振动关联度较高的有效数据,采用最大信息系数MIC 获取车体垂向、横向及水平3 个方向上的耦合参数,设定输入变量为x,输出变量为y,则互信息I(X,Y)可以表示为[18]

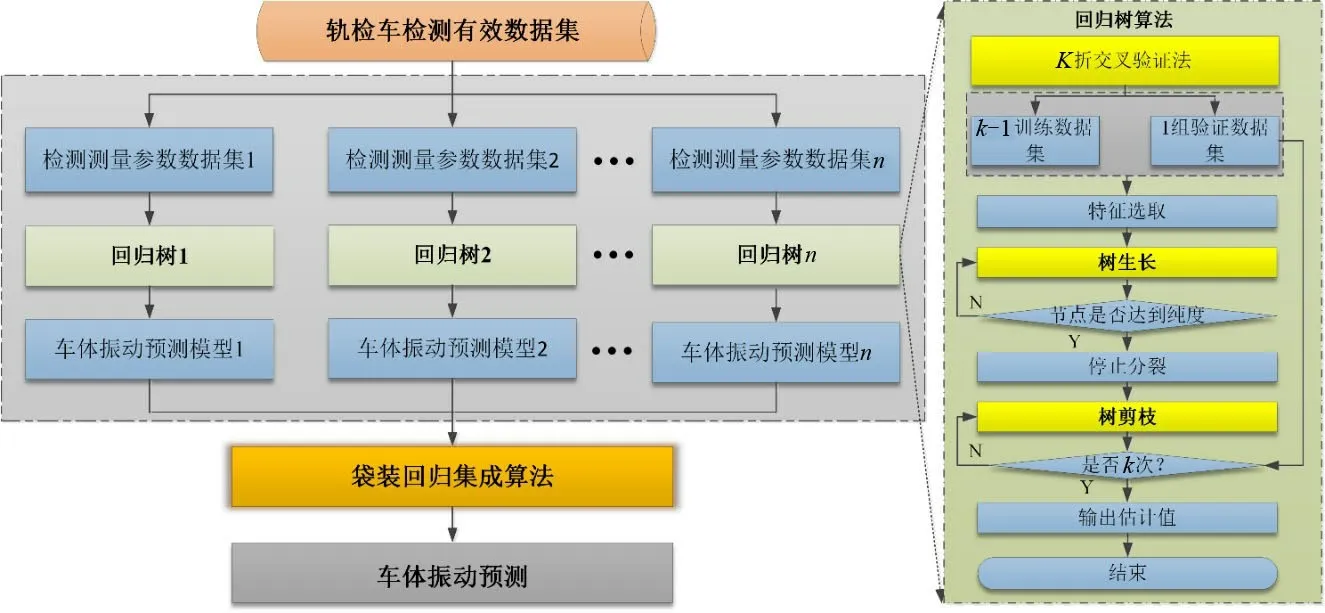
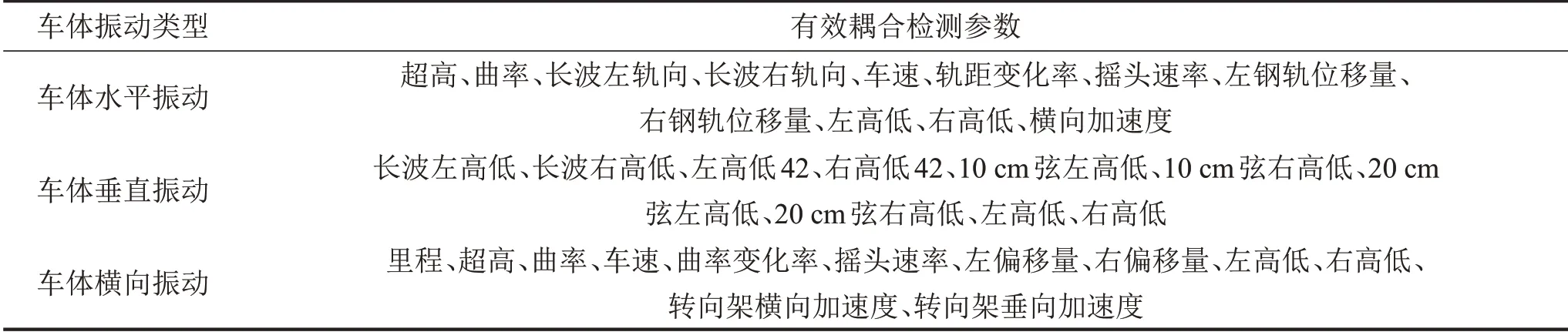
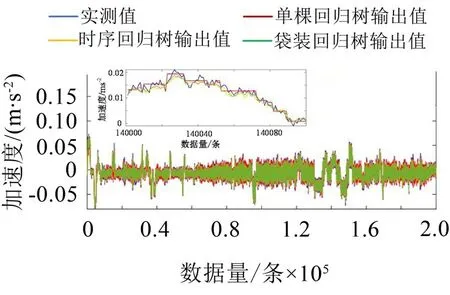
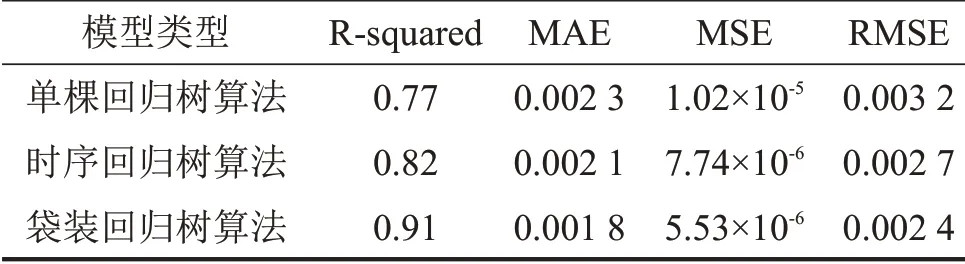
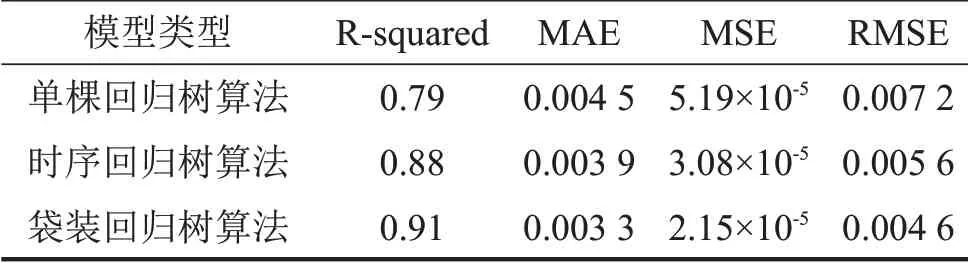
式(3)中:p(x)和p(y)为边缘概率分布,p(x,y)为联合概率密度函数。设数据集的样本数为n时,B(n)=n0.6,当xy 图2为基于袋装回归树集成算法的车体振动预测算法流程图,利用最大信息系数MIC 获取轨检车检测有效数据集,分别采用回归树算法构建车体预测模型,最后利用袋装回归集成算法优化预测结果,实现车体振动的高精度预测。 图2 基于袋装回归树集成算法的车体振动预测算法流程图 回归树算法主要由树生长和树剪枝构成,是一种较为常用的回归算法[17],为了防止出现“过拟合”现象,在树剪枝过程中采用了K折交叉验证算法。 设定D={(x1,y1),(x2,y2),…,(xn,yn) },为轨检车检测有效数据集,选择第j个变量x(j)和其取值s作为分隔变量和分隔点,可以得到两个分隔区域: 将数据集划分为L单元,即α1、α2、…、αL,每个单元对应的输出值为Cl,回归树模型可表示为 模型的损失函数可用训练数据集的数据误差表示: 利用最小二乘法可以求得最优输出值为 回归树通过寻找最优切分变量j和最优切分点s来实现输入空间的划分,即求解[17]: 将利用选定的最小值对(j,s)划分出的区域和输出值表示为 然后根据上述步骤递归地对划分出的两个子空间继续进行划分直至节点变为纯性节点。为了防止树生长出现“过拟合”现象,在树剪枝过程中采用K折交叉验证法来测试回归树生长过程中产生的子样本分支是否需要修剪,其主要过程如图2 所示。将数据集分为k-1组训练数据集和1组验证数据集,将k-1组训练数据集用于树生长,最后用1组验证数据集验证模型是否进行剪枝。重复k遍模型验证,将结果平均值作为最终的预测值。 袋装回归集成算法流程图如图3所示。其是通过自助采样法对原始数据集进行随机抽样,生成新的数据集,新的数据集之间相互独立,每轮训练可以并行开展,在训练速度上具有较为明显的优势。 图3 袋装回归集成算法流程图 利用回归树算法在新的数据集中建立回归树模型并获得预测输出值,将所有的回归树模型的输出预测值的平均值作为袋装回归集成算法的最终值。因此,袋装回归树集成算法的数学模型可以表示为 式(12)中:hA(x)为袋装回归树集成算法输出值;hi(x)为每个回归树输出值。 为了验证基于轨检数据的轨道车辆车体振动预测方法的正确性,对GJ-5型轨检车在广深Ⅱ线工务段所采集的38 个检测参数进行数据预处理并得到车体垂向、横向和水平3个方向的加速度MIC值,结果如表1 所示。将表1 中反映车体3 个方向的振动MIC值较大的参数取出,并得到车体垂向、横向及水平3个方向的有效耦合参数,结果如表2所示。采用表2 中的有效耦合检测参数,利用袋装回归树集成算法预测车体振动加速度数值,关键参数设置如表3所示。并与单棵回归树算法和时序回归树算法进行对比,结果如图4至图6所示。 表1 检测参数与车体振动加速度的MIC值 表2 车体振动有效耦合检测参数 表3 袋装回归集成算法关键参数设置 图4 车体垂向振动加速度曲线对比图 从图4 至图6 所示车体振动加速度对比曲线的整体图中可以看出,所有算法的预测值和实测值的波动趋势大致相同。 图6 车体水平振动加速度曲线对比图 从图5与图6的局部放大图来看,单棵回归树模型横向和水平的振动加速度输出曲线都呈阶梯状的线型,与实际振动加速度曲线相比虽然能反映出大致的趋势,但是仍存在较大误差。对比图4 中的单棵回归树模型振动加速度局部放大曲线与实测曲线,可以看出有些数据段呈现相反的波动趋势。原因在于影响列车车体垂向振动的因素均是轨道高低不平顺参数,各项参数的特征较为相似,虽然回归树在分裂过程中对差异较大的数据类型能够准确进行特征提取,但是对于数据特征差距小的因素,回归树的学习效果不是很好。袋装回归树集成算法和时序回归树算法的输出曲线能够较好预测出车体3个方向的振动,但是相比之下基于袋装回归树集成算法的振动加速度输出值更接近于实测值。 图5 车体横向振动加速度曲线对比图 为了进一步量化预测效果,采用拟合度(Rsquared)、平均绝对误差(MAE)、均方误差(MSE)、均方根误差(RMSE)等评价指标对算法进行评价,结果如表4至表6所示,具体公式如下: 式(13)至式(16)中:yi为真实值,fi为预测值为真实值的平均值,||fi-yi为绝对误差。R-squared越接近1,表示回归拟合度越好。MAE 表示绝对误差的平均值,MSE表示参数估计值与参数真值之差平方的期望值,RMSE 表示均方误差的算术平方根,此3 项值越小说明算法的精确度越高。 从表4 中可以看出,车体垂向振动预测算法中单棵回归树模型R-squared为0.16,说明算法的精度偏低。而时序回归树算法性能优于单棵回归树模型,拟合度达到了0.74。相比之下,袋装回归树集成算法的性能最优,拟合度达到了0.90,其他3 种误差指标均大于0.002 9,说明袋装回归树集成算法具有较好的预测效果。 表4 轨道车辆车体垂向振动预测评价指标 表5 给出了车体横向振动预测性能评价指标,通过比较单棵回归树、时序回归树和袋装回归树算法的拟合度、平均绝对误差、均方误差和均方根误差可以看出,袋装回归树集成算法性能优于时序回归树算法和单棵回归树算法,其对应的R-squared 为0.91,MAE、MSE和RMSE的指标均低于0.003。 表5 轨道车辆车体横向振动预测评价指标 表6 为轨道车辆车体水平振动预测评价指标,比较表6 中的3 种轨道车辆车体水平振动预测回归树算法性能可知,袋装回归树集成算法的拟合度均比其他两种回归树算法高,达到了0.91。该值越接近于1,说明该模型的性能越好。同时袋装回归树集成算法的平均绝对误差、均方误差和均方根误差都比另外两种模型小,最大值为0.004 6。 表6 轨道车辆车体水平振动预测评价指标 为了准确获取并预测轨道车辆车体振动加速度大小,本文利用轨检车日常检测数据,构建基于袋装回归树集成算法的车体振动预测模型,实现了高精度轨道车辆车体振动预测,主要结论如下: (1)采用归一化和最大信息系数方法,有效实现了多量纲参数归一化和数据筛选,获取了与车体垂向、横向及水平振动密切耦合参数; (2)车体水平振动主要与超高、曲率、长波左轨向、长波右轨向、车速、轨距变化率、摇头速率、左钢轨位移量、右钢轨位移量、左高低、右高低、横向加速度12个检测参数相关; (3)车体垂向振动主要与长波左高低、长波右高低、左高低42、右高低42、10 cm 弦左高低、10 cm弦右高低、20 cm 弦左高低、20 cm 弦右高低、左高低、右高低10个检测参数相关; (4)车体横向振动主要与里程、超高、曲率、车速、曲率变化率、摇头速率、左偏移量、右偏移量、左高低、右高低、转向架横向加速度、转向架垂向加速度12个检测参数相关; (5)与实测结果相比采用基于袋装回归树集成算法的轨道车辆车体振动预测方法精度可达90%以上,误差低于0.003 g。
3 基于袋装回归树集成算法的车体振动预测
3.1 回归树算法






3.2 袋装回归集成算法


4 实验验证







5 结语
猜你喜欢
当代水产(2022年6期)2022-06-29
农产品市场周刊(2021年1期)2021-05-04
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
成长·读写月刊(2018年1期)2018-01-15
环球时报(2017-10-30)2017-10-30
电力系统及其自动化学报(2016年5期)2016-12-01
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18