基于欺骗干扰技术的导航对抗新途径
2021-08-26 09:09马海宁潘颜楠
指挥控制与仿真 2021年4期
马海宁,潘颜楠,孙 志
(中国人民解放军31638部队,云南 昆明 650000)
20世纪90年代,美军首次提出了“导航战”的概念之后,各国军方相继展开对导航战的应用研究。在近期的亚阿战争中,阿塞拜疆使用了TB-2无人机对亚美尼亚的装甲部队进行了针对性打击,这再次提高了各方对导航战的关注程度,尤其是无人机的欺骗干扰技术正逐渐成为导航战领域的重点研究对象之一[1]。
1 前言
欺骗干扰技术包括转发式欺骗干扰技术和生成式欺骗干扰技术两种。转发式欺骗干扰技术是将干扰对象所接收的导航信号进行延迟后转发。生成式干扰技术是指干扰源自身生成虚假的导航信号对目标进行干扰。根据所生成欺骗信号是否与真实信号同步,生成干扰技术可以分为同步式生成欺骗干扰技术和异步式生成欺骗干扰技术[2-4]。目前在军事方面,应用较多的是异步生成式欺骗干扰技术,该技术主要通过以下两步实现。
Step1:利用压制阻断干扰装置对敌方导航设备进行攻击,迫使该导航设备上的接收机重新进入搜索状态;
Step2:在敌方导航设备接收机进入重新搜索阶段时,干扰源释放欺骗导航信号,达到欺骗干扰目的。
采用该技术对导航设备实施欺骗干扰时,需要对真实的导航信号进行压制,所以,易被敌方接收机察觉[5-7]。同步式欺骗干扰技术无需进行压制干扰,通过释放欺骗信号,诱导目标逐步偏离真实信号,从而达到诱骗的目的。
在国内外公开的文献中,对转发式和异步生成式欺骗干扰技术的研究较多。杨景署等人通过对不同支路的卫星信号进行时延处理,实现对无人机的欺骗干扰,但没有对时延取值的相关约束条件进行研究;刘天庆等人给出了转发式时延控制算法模型和缩小钟差变化的方法;张会锁等人通过改变不同卫星信号的多普勒频移和信号延迟对目标的定位和行动轨迹进行干扰[8];何亮等人对异步生成式欺骗干扰的方法策略进行了分析,并设计了仿真实验[9]。但迄今为止,学术界对同步生成式欺骗干扰技术的研究还仅仅停留在理论分析阶段[10-12],缺乏实验数据支撑和相关测试验证[13]。
本文的主要思路是:通过干扰源模拟真实的导航信号,在接收机不被察觉的前提下接收欺骗信号,而后干扰源逐步改变所模拟导航信号的相关参数,引导干扰对象逐步脱离真实导航信号。整个干扰过程都不会被敌方接收机察觉,但技术难度较大,目前仅仅停留在理论研究阶段,没有成熟的技术可以借鉴遵循。本文建立了欺骗信号模型,给出了相应欺骗方法,利用DSP(Digital Signal Process)芯 片 和 FPGA (Field Programmable Gate Array)构建小型欺骗干扰源,对民用接收机和无人机进行干扰,效果较好。
2 信号同步
干扰源根据自身所接收的真实卫星信号,推算出干扰对象所接收到的真实信号的强度、码相位和载波频率,然后生成欺骗信号,使得欺骗信号与真实信号到达干扰对象时保持同步。
2.1 欺骗信号模型的建立
某时刻t,干扰源所发出的信号可以表示为[14-15]


2.2 信号强度计算
如图1所示,rjs表示卫星j到干扰源的距离,rju表示卫星到干扰对象的距离,rsu表示干扰源到干扰对象的距离。其中,rjs、rju数值相近,且远大于rsu,因此,干扰源所接收到的卫星信号强度与干扰对象所接收的卫星信号强度相似。
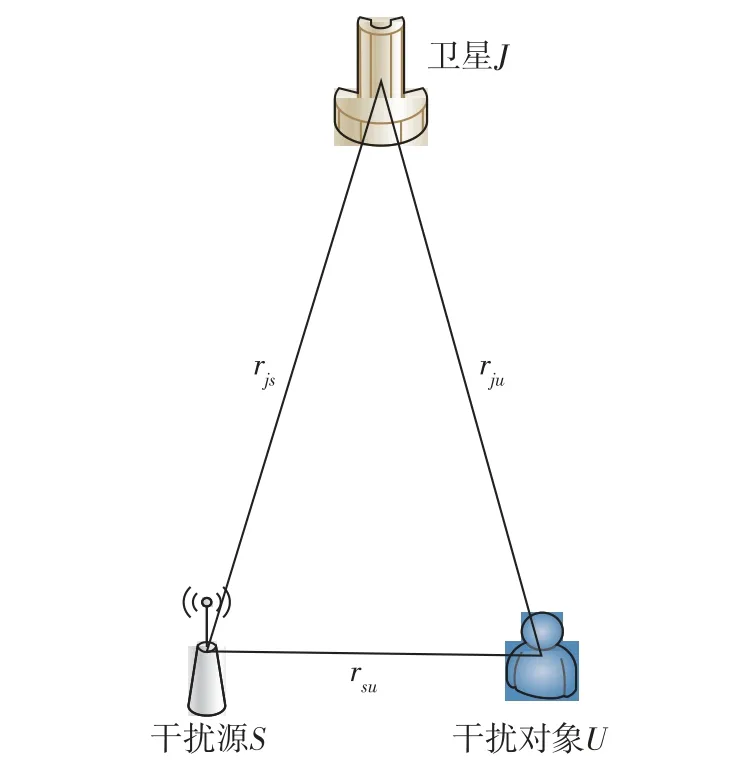
图1 信号强度计算示意图
在t时刻干扰源模拟卫星j发出的导航信号强度可用如下公式表示:

2.3 码相位延迟计算
在t时刻干扰源模拟卫星j导航信号的码相位延迟可用如下公式表示:


在初始状态,干扰对象接收的欺骗信号与真实导航信号的相位应当一致,这样才不容易被敌方接收机发觉,因此,必须对欺骗信号的初始状态进行严格控制,也就是必须精确控制欺骗信号的发出时刻,使其到达干扰对象时的相位与真实导航信息相位一致。
2.4 载波多普勒计算
在t时刻干扰源模拟卫星j所产生欺骗信号的载频多普勒可用下列公式进行表示:

2.5 信号同步方法
本文采取一种本地授时型接收机,该接收机可以提供满足要求基准时钟和1PPS信号(1PPS表示秒脉冲)。具体步骤如下:
Step1:干扰源可以通过本地授时型接收机读取卫星时刻;
Step2:干扰源将1PPS信号、10 MHz时钟作为FPGA的数字信号合成和射频Agent信号输出的时基和时钟源,实现时间上的同步;
Step3:根据2.1—2.4的相关知识,计算欺骗信号的相关参数;
Step4:通过DDS技术控制欺骗信号的状态;
Step5:通过DDS中的FPGA进行多级调整,以此来模拟卫星与干扰对象之间的多普勒变化。
通过上述方法来保证欺骗信号与真实信号同步。
3 诱骗方法
为避免干扰源发出的欺骗信号被干扰对象的接收机识别,本文将整个诱骗过程分成两步来实施[16]。
Step1:同步适应
如图2所示,在同步适应阶段,欺骗信号的强度低于真实信号的强度,也就是说ΔPj(t)<0;初始相位误差与多普勒频移误差要保证在一定范围内,欺骗位置与干扰对象的真实位置要一致,即Δτj(t)=0、Δfj d(t)=0。随后,逐步扩大ΔPj(t),使得欺骗信号的强度大于真实信号的强度,并逐步取代真实信号,取得对干扰对象的控制权。

图2 欺骗信号诱骗方法示意图
欺骗对象在取代真实信号的过程中,极易被接收机察觉,因此,必须准确控制欺骗信号增大速率,确保整个过程平稳而缓慢。
Step2:动态调整

当前,市场上的GPS接收机多采用3阶及以下的PLL,此时若以某一恒定的速度发生突变会导致欺骗信号发生多普勒效应[15],极易被接收机察觉。本文采用初速度为0的匀加速调整策略,当速度达到某一固定值后不再变化,即
式中,vmax为所设定的最大值,a为加速度,a取决于接收机PLL的噪声带宽和更新频率。在动态调整阶段,若vmax和a增大,则必须相应地增大欺骗信号的强度,因此vmax和a不宜设置得过大。
4 实验分析
4.1 干扰源总体设计
参考现有的异步生成式欺骗干扰源,按照我们所建立的信号模型搭建欺骗干扰源,该干扰源包括四个模块:接收Agent、信号处理Agent、上变频及射频调理Agent、主控Agent。设计思路如图3所示。

图3 欺骗干扰源组成框图
各个Agent的详细介绍如下:信号处理Agent是整个干扰源的核心组成部分,采取的是DSP+FPGA架构,主要任务是对接收Agent传递的导航数据进行分析,生成欺骗信号,通过上变频及射频调理Agent,以及发射天线发送欺骗信号;接收Agent是以某授时型接收机为基础,将干扰源系统时间与卫星系统时间进行同步处理,并将时间信息、导航信息、位置信息等相关参数传输给信号处理Agent;上变频及射频调理Agent完成信号调理,并将中频信号转变为上频信号;上位机主控Agent实现人机交互,并控制系统中其他组件之间的数据交换等,目标侦测系统的主要任务是对干扰对象的位置速度等运动信息进行分析,并将其传递给上位机主控Agent。
4.2 进行干扰试验
为检验本文所述方法的合理性,本文分别使用某民用接收机和某型大疆无人机进行测试。
4.2.1 民用接收机的干扰实验
在对民用接收机进行干扰之前,首先设置相关实验参数,然后释放干扰信号,观察接收机的实验数据,分析干扰效果。
1)实验数据的设置
①同步适应阶段
干扰源所设定的初始位置与接收机的真实位置pu(t+τsu)一致,接收机的初始速度与加速度均为0。开始时,欺骗信号强度小于真实信号的强度,欺骗信号以2 dB/s的速度增强8 s。
②动态调整阶段
欺骗信号强度达到峰值之后不再改变,调整欺骗信号所仿真的导航信息,在ECEF(Earth-Centered Earth-Fixed)坐标系下,x轴向上的加速度为0.2 m/s2,vmax为3.8 m/s,y轴、z轴向速度均为0。
2)时间同步检验
在同步适应阶段,需要对欺骗信号和真实信号进行时间同步测试,具体方法如下:
Step1:使用两台接收机分别接收欺骗信号和真实信号,并输入两个信号的秒脉冲;
Step2:使用示波器对两个秒脉冲的对齐精度进行测试[17]。
本文所使用的接收机的型号为NovAtel OEM615,示波器的型号为TDS3052B,经过多次检验,真实信号与欺骗信号的秒脉冲对齐误差始终小于100 ns,这表明欺骗信号与真实信号可以保持时机同步。
3)欺骗信号强度变化对接收机跟踪环路的影响
当热噪声背景恒定的情况下,可以使用射频信号的载噪比来体现所接收信号的强度[18]。因此,在同步适应阶段,可以通过测试接收机接收信号载噪比的变化情况来研究欺骗信号强度变化对接收机跟踪环路的影响。具体方法如下:
Step1:接收机的射频输入端同时连接可接收卫星信号的天线与干扰源的输出端;
Step2:关闭干扰源,让接收机只接收真实的卫星信号,直至接收机输出真实位置信息。
Step3:开启干扰源,逐步增大欺骗信号的强度,观察接收机所记录的可见星的信噪比变化。
本文所采用的接收机的型号为W220,开启干扰源后,从第5 s开始,欺骗信号的强度以2 dB/s的速度持续增加8 s,接收机所记录的可见星为PRN8、PRN21、PRN26。其信噪比变化如图4所示。
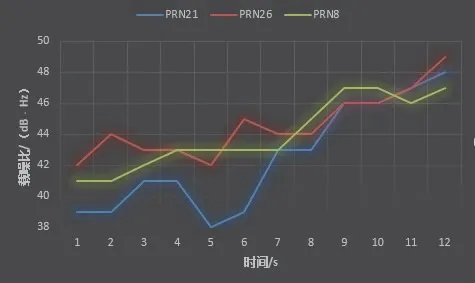
图4 载噪比测试结果
以可见星PRN8为例,由图4可以看出,在1~4 s时,欺骗信号强度低于真实信号强度,PRN8的载噪比小于43 dB·Hz;在第5 s时,欺骗信号的强度开始增加,但仍然小于真实信号强度,此时接收机接收到的PRN8的载噪比没有明显变化,在第7 s时,接收机接收到的PRN8的载噪比明显增大,此时欺骗信号强度大于真实信号强度,并在接收机内部占据主导地位,开始控制接收机内部的跟踪环路。
4)定位测速干扰实验
实验数据的设置保持不断,从第30 s开始,调整所仿真目标的速度,x轴向的初速度为0,以0.2 m/s2的加速度持续19 s,y轴、z轴向速度均为0。相关实验结果如图5所示。
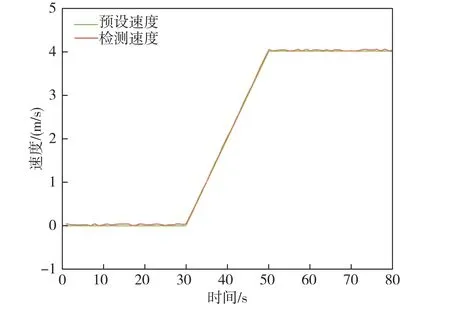
图5 检测速度与预设速度对比
从图6可知,仿真目标的位置、速度变化与欺骗信号所设定的位置、速度变化基本一致,说明接收机所仿真目标已经成功被诱骗。

图6 预设轨迹与检测轨迹对比
4.3 民用无人机的干扰实验
本节首先使用干扰源对某型大疆无人机进行静态测试,即无人机处于静止状态,通过无人机自带的调参软件观测传感器飞行路径的变化情况,然后进行动态测试,起飞无人机,设定飞行路径,释放干扰信号,观察是否偏离原定的飞行路径。
1)无人机静态干扰测试
静态测试方法与4.2.1节基本一致。开启无人机,使其接收真实信号,待其输出稳定的位置信息后,释放干扰信号,通过无人机自带的调参软件Assistant2来观察无人机的定位点偏离原定位点的距离变化情况,如图7所示。
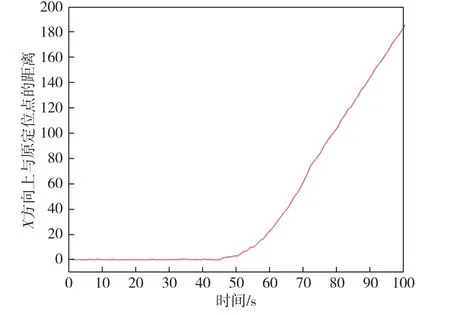
图7 无人机检测轨迹
从图7中可以看出,在0~50 s时,无人机的定位点与原定位点的距离为0,也就是无人机的位置未发生明显变动,定位一直没有中断,从72 s开始,无人机的定位点发生明显变化,说明干扰源开启之后,无人机开始锁定欺骗信号,并输出相关定位信息,干扰成功。
2)无人机动态干扰测试
为检验本文所述方法的合理性,我们仍以某型大疆无人机作为干扰对象,在昆明某实验场地进行干扰试验,所需设备及相关场地如图8a)所示。设定无人机从A点沿直线匀速飞行至D点,飞行速度为0.5 m/s。无人机从A点出发时,释放低强度的欺骗信号,可以观察无人机继续沿预定的飞行路径飞行至B点,如图8b)所示。当无人机飞出5 s之后,开始增加欺骗信号的强度,每秒增加1 dB,持续10 s。第15 s时,无人机飞行至C点,如图8c)所示,可以观察到无人机仍然沿既定路线飞行,不过此时欺骗信号已经进入接收机内部,相对于真实信号已经占据主导地位。此时,干扰源改变欺骗信号(诱骗向东北方向偏离预定飞行路径),持续时间为5 s,可以观察到干扰对象偏离原飞行路径飞行至E点,如图6d)所示,说明干扰成功。
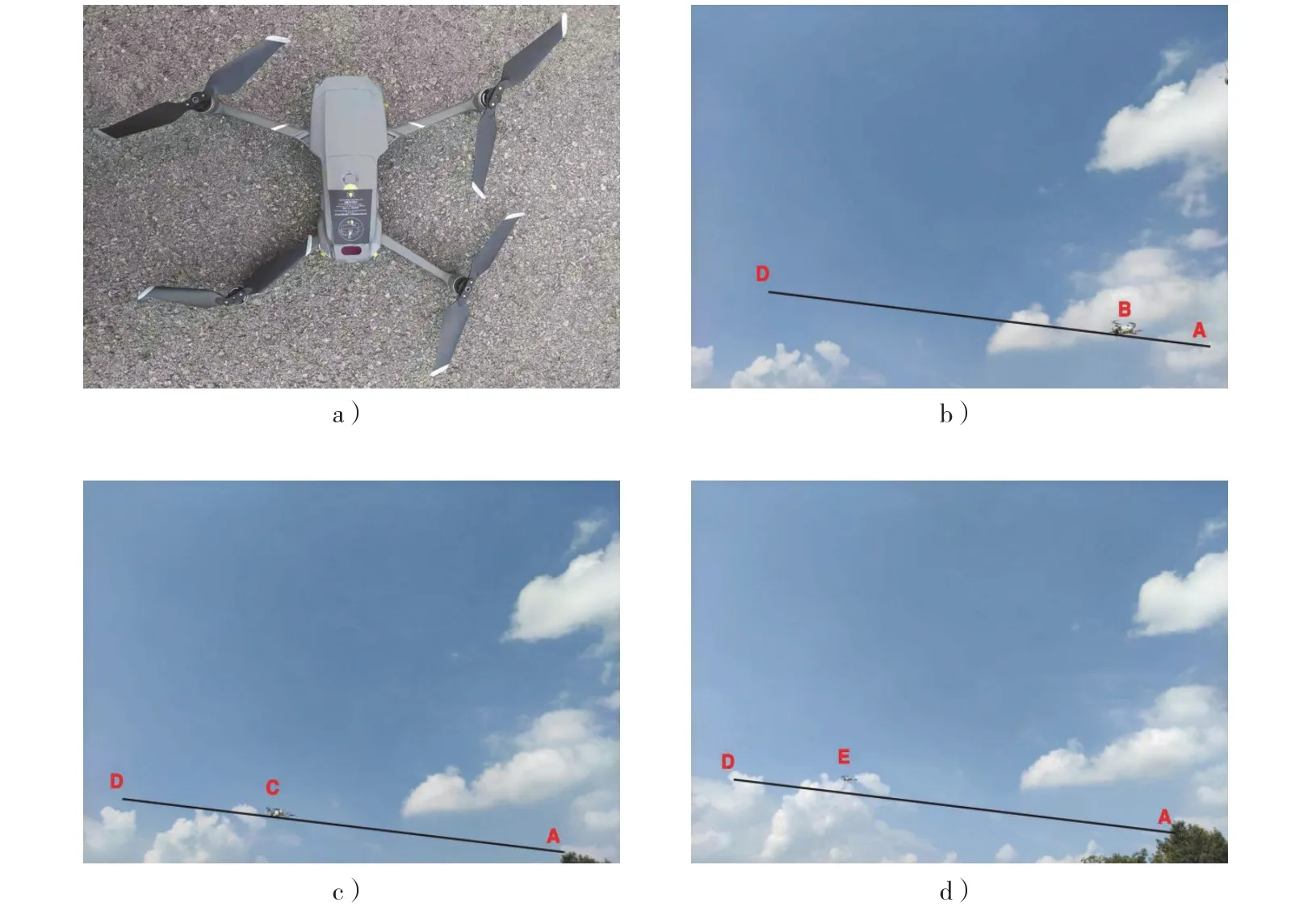
图8 干扰实验组图
5 结束语
本文建立了卫星导航干扰信号模型,给出了相关信号参数的计算方法,以及诱骗过程中的欺骗信号调整策略。通过民用接收机和无人机进行验证,结果表明,在无须压制干扰的情况下,就可以对干扰对象进行诱骗,验证了本文所述方法的可行性。但是,现代高科技尖端武器装备往往采用多种导航方式,如惯性导航、视觉导航等,即使我们对其卫星导航信号干扰之后,仍存在其他导航途径,这就要求我们必须根据不同的导航设备设计不同的干扰策略,且多数军用固定翼无人机的接收机具有抗干扰能力,若要对其进行欺骗干扰,还需要我们进一步了解其抗干扰原理,然后进行针对性制定策略,这些都是下一步的研究重点。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
全球定位系统(2021年5期)2021-12-14
计算机仿真(2021年2期)2021-11-17
全球定位系统(2020年1期)2020-03-31
中国电气工程学报(2019年18期)2019-10-21
科技视界(2016年16期)2016-06-29
科教导刊·电子版(2016年15期)2016-06-25