
变压器绝缘层绕制张力系统反馈耗散Hamilton控制
2021-08-27 09:34许家忠黄海祥孙克伟
电机与控制学报 2021年8期
许家忠,黄海祥,孙克伟
(哈尔滨理工大学 自动化学院,哈尔滨 150080)
0 引 言
为了保证变压器绝缘性能,降低相邻线圈层电压飞弧的风险,需要在线圈层间加入绝缘层。利用细条状绝缘带连续缠绕的思路研制变压器绝缘层自动绕制系统可以解决繁杂的工人劳动,然而绕制过程中绝缘带张力控制这一核心技术主要依赖于张力控制系统的设计。
工业张力控制系统通常使用固定增益的PI控制器[1-4],这需要依据工作环境以及材料参数对增益进行整定,由于操作条件和幅材参数的改变以及系统中存在的不确定性导致这是一项艰巨的任务。为了改进与提升张力控制系统的性能,研究人员进行大量深入的研究。Pramod R等分别使用基于模型参考和中继反馈方法进行自适应PI控制器的设计[5]。为了有效减小和补偿在系统存在的张力扰动,刘善惠等设计了一种自抗扰控制器,提升了系统的稳定性[6]。由于两轴之间速度差异会导致系统中产生明显张力扰动,Van Tu Duong等针对变压器绕组系统的不确定模型,提出了基于模型参考自适应的交叉耦合同步速度控制方法[7]。为了避免张力传感器精确度不足所造成的测量误差,降低控制系统的成本和复杂度,可以使用基于观测器的张力控制策略,还可以对系统中存在的扰动进行良好的观测[8-10]。为了提升张力控制系统的鲁棒性,满足张力控制对实时性、响应速度的需求,Vincent Gassmann等提出一种基于H∞改进办法[11]。通常情况下恒张力控制是在固定扭矩下实现,但是绝缘带张力会随着开卷辊的半径、变压器芯模半径的改变而波动[12-13]。如果张力太小,则主轴无法带动绝缘带前进,造成松弛现象,影响下一层线圈的紧密程度,而如果张力太大或发生突增时,除了浪费扭矩外,还会使绝缘带产生形变,甚至损坏。在绕制过程中保证均匀的张力才能获得较佳的缠绕品质。
当缠绕芯轴的几何形状非圆时,在主轴加减速过程会导致张力出现较大扰动。传统张力控制系统采用由弹簧、减震器和辊轮组成的被动Dancer机构衰减速度和张力突变时对的系统冲击[14-15],本文为了有效削弱椭圆形芯模几何形状造成的张力波动,采用混合Dacner机构进行张力与速度扰动的缓冲。耗散Hamilton控制方法能够结合系统物理结构特性,从能量存储、消耗和转换角度看待系统,通过能量重构和结构重组的方法实现控制器设计。为了避免将系统模型预先转化为端口受控Hamilton系统所带来的不便,可以通过寻找适当的反馈控制率,将非线性系统转化为符合耗散Hamilton系统的方法进行控制器的设计,使得控制器结构简单,易于实现[16-17]。基于上述分析,针对传统固定增益PID控制下绝缘层绕制速度与张力之间耦合性强,波动大的问题。提出一种基于反馈耗散Hamilton理论的张力控制系统,进行速度与张力的协调控制,达到张力大小精确控制的目的,并且快速调节开卷轴速度,实现期望张力的连续跟踪。
1 绝缘层绕制系统描述与建模
图1为所设计的变压器绝缘层自动绕制系统示意图,整个系统大致分为3部分,分别是放卷部分、运输部分、收卷部分。收卷轴即主轴,主要实现速度调节,绝缘纸带安装在开卷机的芯轴上,期望张力大小调节是通过控制面板的电位计旋钮调节Dancer气缸中的压力来实现,在系统工作时如果Dancer臂保持在参考位置则气缸对Dancer臂的压力近似等于两倍的张力设定值,需要考虑Dancer自身以及绝缘纸带的重力作用,因此一般气缸压力略大于两倍的期望张力值,芯模旋转过程中Dancer摆动进而缓冲张力突变对系统造成的冲击。通常情况下忽略自由辊的动态特性,因为它们仅在加减速时对系统的动态特性产生影响,本文中假设纸带在传输过程中与辊之间没有发生相对滑动,下面对开卷以及收卷部分动态特性进行分析。
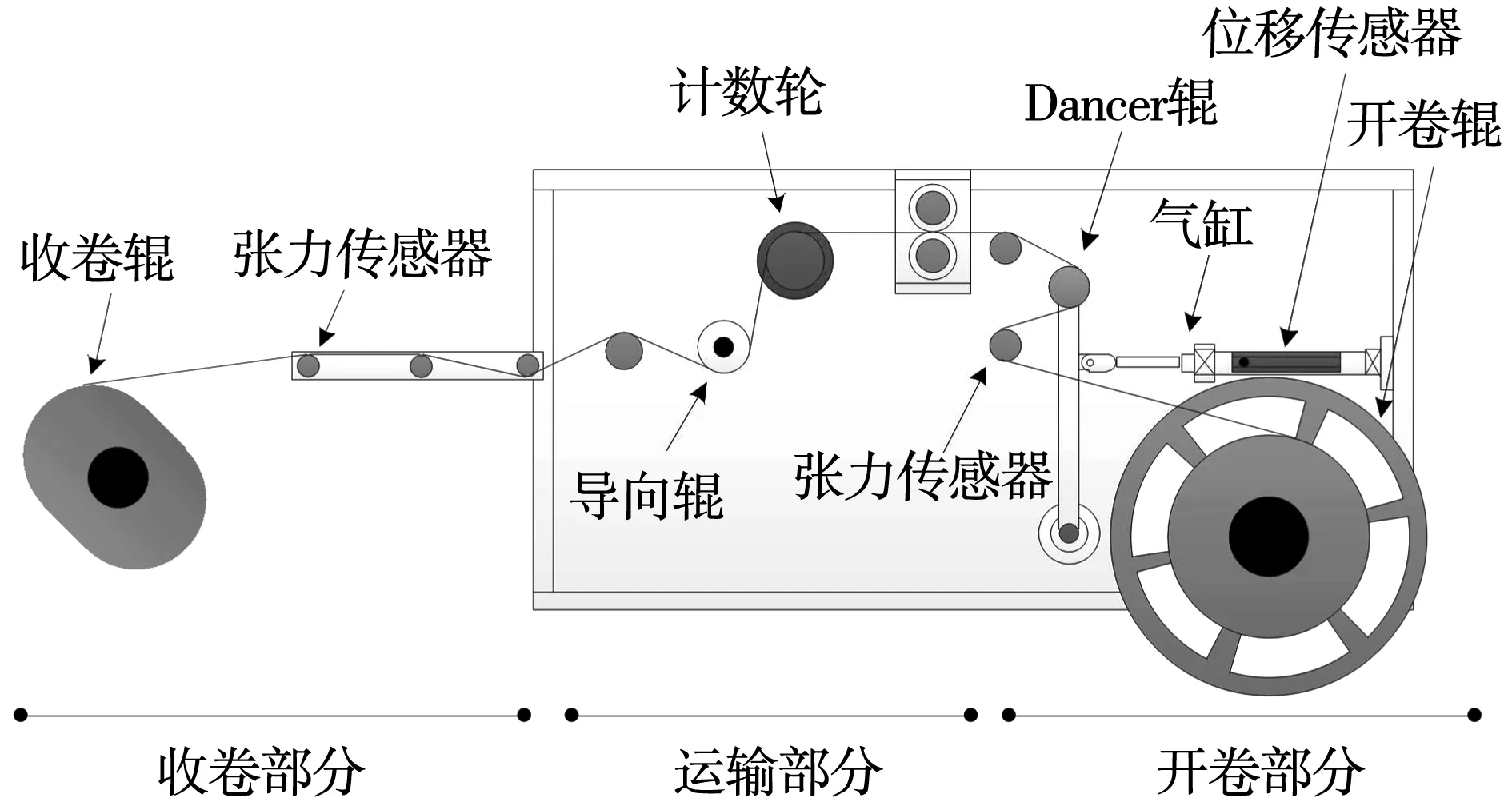
图1 变压器绝缘带自动绕制系统示意图Fig.1 Schematic diagram of automatic winding system for insulation belt of transformer
开卷部分由开卷机与Dancer机构组成,随着绕制任务的进行开卷辊上绝缘纸带盘的半径不断减小,因此,开卷机的半径与惯量随着时间不断变化,在时间t时的有效转动惯量J1(t)可以表示为
J1(t)=Jm1+Jc1+Jw1(t)。
(1)
式中:Jm1是电机侧所有旋转元件的惯量;Jc1是开卷辊的惯量;Jw1(t)是绝缘纸带盘以及材料的惯量。Jm1和Jc1是不随时间改变的常量,由于绝缘纸带不断的被输送,使得Jw1(t)随时间发生改变,Jw1(t)可以表示为
(2)
式中:H是绝缘纸带宽度;p是绝缘纸带密度;Rc1开卷辊的半径;R1(t)是绝缘纸带半径。开卷辊动力学模型可以描述为
(3)
式中:n1是电机轴与开卷辊之间的传动比;w1是开卷辊的角速度;bf1是开卷辊的摩擦系数,由式(1)能够得出,J1(t)的变化率只与Jw1(t)有关,通过式(2)可以得出J1(t)的变化率为
(4)

(5)

(6)
根据式(3)~式(6)可以得到
(7)
利用质量守恒定律对开卷辊与Dancer辊之间跨度的绝缘纸带进行分析,开卷辊张力T1的动态特性如下:
(8)
式中:L1是开卷辊与Dancer辊之间的绝缘纸带长度;A是绝缘纸带横截面积;E是绝缘纸带的杨氏弹性模量;V2是Dancer辊的速度;T0是开卷辊上绝缘纸带的卷入张力;ld是Dancer摆臂的长度;θ是Dancer的偏移角度。
混合Dancer的角位移动态特性是在转矩平衡的基础上得出的,可以表示为
(ld+R2)T3cosθ-Mdglgsinθ-Bf。
(9)
式中:Jd和Md是整个Dancer机构的惯量与质量;Fc是气缸对Dancer机构的压力;lc是Dancer摆杆固定端到气缸的距离;T1和T3分别是Dancer的上游与下游张力;R2是Dancer辊的半径。由于主轴芯模是非圆的几何形状,导致Dancer的角位移θ一直处于浮动的状态,在加减速阶段Dancer的浮动较为大,能够有效减小由于速度突变对系统带来的冲击。
为了使Dancer在稳定状态时保持在参考位置,气缸对于Dancer的支持力为
(10)
式中:Ld为Dancer臂运动所绕圆心到Dancer辊中心距离;La为Dancer臂运动所绕圆心到气缸支撑点的距离;Tref为期望张力大小。
主轴缠绕的过程中,主轴半径R3不断变大,惯量J3不断增加,主轴部分的动态特性与开卷部分相似,可以表示为:
(11)
(12)
式中:J3、R3、V3分别是收卷部分转动惯量、芯模半径、绝缘带速度;n3是电机轴与收卷辊之间的传动比;w3是收卷辊的角速度;bf3是收卷辊的摩擦系数;L3是收卷辊与Dancer辊之间的绝缘纸带长度。
可以得到变压器绝缘层绕制系统速度张力数学模型:
(13)
2 速度张力系统分析与控制器设计
2.1 速度张力系统分析
张力出现扰动根本原因是绝缘纸带速度的不断改变,首先,由于收卷辊几何形状使纸带切线速度处于周期变化状态,当运动到辊的长边时半径减小,切向速度减小,当运动到辊的短边时半径变大,切向速度增加,从而导致张力处于较大的波动之中;其次,由于开卷过程中纸盘半径不断减小,纸带切线速度发生变化,导致张力出现扰动,张力波动又会向下一阶段传递[18]。
通常情况下允许的张力波动是工作时张力的±4%,为了降低速度变化的造成的张力波动,提高绝缘纸带张力控制的精确度,因此,在控制器设计的过程中,要考虑系统对最大张力扰动响应的性能,提升系统对扰动调节的速度。开卷辊上的纸带被输送到下一阶段的过程中,纸盘直径不断减小,张力的频率增加,张力扰动的范围可以通过式(14)确定,例如,如果开卷辊的直径为0.5 m到0.2 m,当速度为400 m/min至700 m/min时,最大频率分别为66.67 rad/s到116.67 rad/s,有
(14)
张力扰动从上游传递到下游,为了预测张力扰动在系统中的传播频率,可以通过一介滤波器等效扰动传播过程,滤波器由跨距长度和初始速度确定图2给出了由式(15)确定的伯德图。开卷部分的最大扰动为12 N,跨距为1.1 m,当工作速度为400 m/min至700 m/min时,产生的扰动从12 N降至2 N所对应的幅度为-15.56 dB,频率分别是36.34 rad/s和62.73 rad/s,当扰动频率不低于62.73 rad/s时,将使其小于2 N,符合系统工作要求。

图2 张力扰动传递的伯德图(400~700 m/min)Fig.2 Bode diagram of tension disturbance transfer(400~700 m/min)
(15)
尽管PID控制作为经典控制方式在工业中被广泛的使用,但是在使用其控制椭圆形变压器绝缘层绕制的张力时,无法有效调节张力干扰的增加,部分情况下张力扰动超出正常工作范围。张力控制系统存在非线性传动环节,由式(13)可以明显看出张力控制系统呈现出较强的非线性、耦合性、不确定性。因此,需要对控制策略与控制算法进行改进,从而增强控制系统对期望张力的跟踪性能以及对张力扰动的削弱能力。
2.2 张力系统反馈耗散Hamilton控制器设计
考虑如下非线性系统

(16)
其中:x是状态向量;N是一个m维流形;u是输入向量,且u∈Rn;f(x)是任一向量场;g(x)是适当阶数矩阵。
如果能够设计出适当的反馈控制律u=I(x),使得相应的非线性系统状态表达式(1)能够写成如下形式

(17)
其中:T(x)能够表示成T(x)=J(x)-R(x);J(x)是反对称矩阵;R(x)为半正定对称矩阵;H(x)为Hamilton函数,则称式(17)为非线性系统式(16)的一个反馈耗散Hamilton实现。
定义状态向量和虚拟输入向量分别为:
(18)
则

(19)
式中:
(20)
(21)
当变压器绝缘层绕制张力控制系统在工作过程中到达稳定状态时,控制系统中各状态变量均到达稳定值,即为系统工作平衡点,设期望的平衡点处的状态为
(22)
I(x)=
(23)

(24)
为了满足控制系统在反馈作用下可以稳定于x0处工作,进行闭环系统Hamilton函数的选择
(25)
假设
(26)
对H(x)求偏导可得
(27)
(28)
为使TT(x)+T(x)≤0,即T(x)具有耗散性,选择如下形式
(29)
根据J(x)与R(x)相关性质,令:
(30)
将式(29)代入可得
(31)
(32)
经过验证,这种方法满足J(x)=-J(x)T且当C1与C2取值适当时,可以保证R(x)≥0,符合耗散特性。式(29)中C1、C2是可调的阻尼参数,随着数值的减小,可以提高张力控制系统的动态特性。因此,虚拟反馈控制向量可以设计如下:
(33)
再将其代入式(24)可以得到反馈控制量为
(34)
其中:e1=x1-x10;e2=x2-x20;e3=x3-x30;e4=x4-x40。此时将式(34)代入式(19)可以得到
(35)
构造张力控制系统(15)的能量函数
(36)

3 仿真与分析
为了检验所提出的控制系统在减小张力扰动方面的有效性,与传统固定增益PID控制进行对比仿真实验,开卷部分在t=5 s时引入速度阶跃干扰使张力发生波动,验证系统稳定性以及响应性能。实验参数如表1所示,参考张力分别为20、30 N,张力响应如图3、图4所示。

图3 速度阶跃扰动对参考张力20 N的影响Fig.3 Effect of velocity step disturbance on reference tension 20 N

图4 速度阶跃扰动对参考张力30 N的影响Fig.4 Effect of velocity step disturbance on reference tension 30 N

表1 仿真模型的参数Table 1 Parameters of simulation
能够明显看出与固定增益PID控制方法比较,所提控制方法有效减小张力的超调与下冲。传统PID控制下参考张力为20 N时,速度扰动从100 r/min变为200 r/min时,张力的误差峰值明显增加,张力最大处接近24 N,速度从200 r/min变为300 r/min时,张力峰值超过24 N;参考张力为30 N时,速度扰动从100 r/min变为200 r/min时,张力最大处接近33 N,速度从200 r/min变为300 r/min时,张力峰值接近34 N,并且出现较大稳态误差。而所提控制器可以较快补偿速度变化,减小张力误差,系统调节时间在缩短至0.5S,能够提升系统响应速度降低稳态误差,表现出更好的扰动调节能力。
4 绝缘纸带缠绕实验
通过如图5所示的绝缘层绕制实验平台将所提控制方式与PID控制方式进行对比实验。为了在实验过程中不失一般性,在两种控制方式下使用相同规格的绝缘纸带以及变压器芯模进行绕制。在实验过程中按照以下步骤进行,首先,将开卷部分的绝缘纸带穿过从动辊与导向辊,经过Dancer机构,再穿出从动辊与导向辊将纸带固定到主轴芯模,然后,根据电位计旋钮设定的张力大小将气压冲入气缸中,最后根据绕制工艺的需求,将收卷轴参考速度控制在100~300 r/min之间阶梯变化,同时在一段时间内保持稳定的速度输出,分析系统张力以及Dancer位置的变化,评估系统的动态与稳态特性。在实验过程中唯一控制绝缘纸带张力的另一个部分是使用PID控制器的主轴部分,工作在速度环模式,缠绕主轴与开卷机之间存在一定的速比N,该比例系数由齿轮比以及辊的直径决定。参考张力为50 N,实验结果如图6所示。

图5 变压器绝缘层自动绕制系统Fig.5 Automatic winding system of insulation for transformer
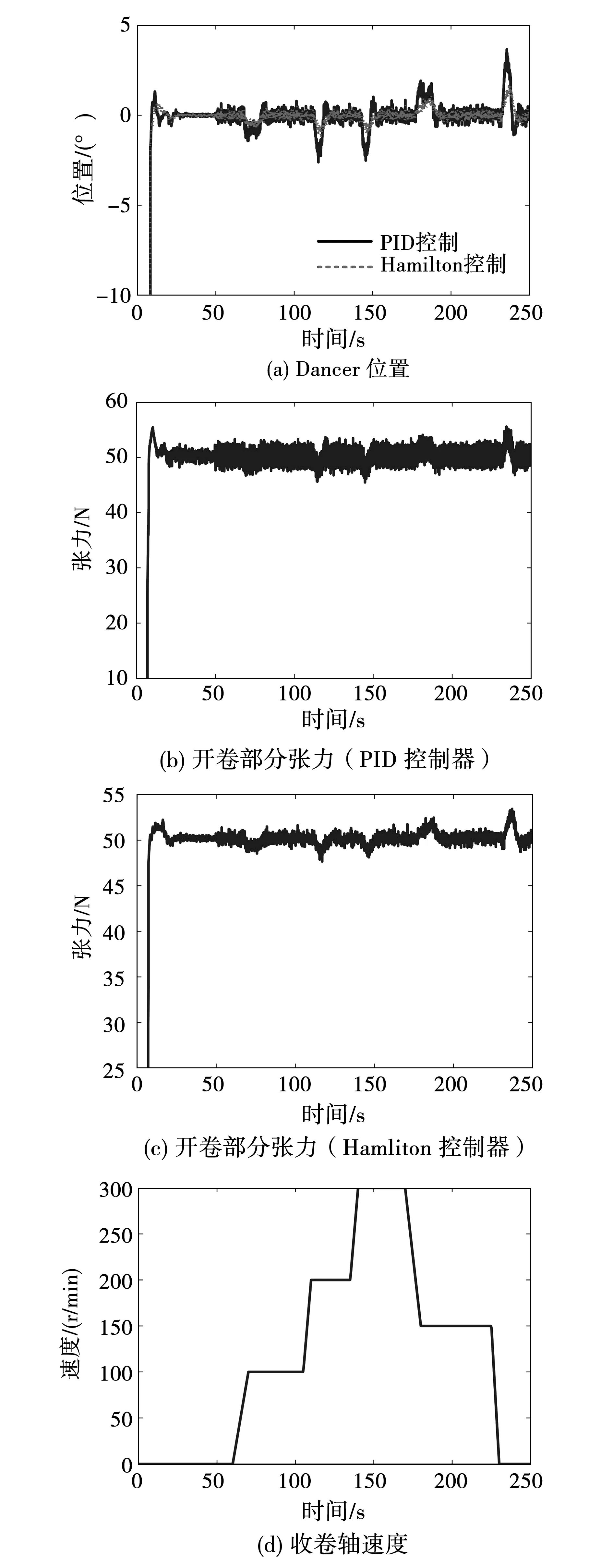
图6 固定增益PID与Hamilton控制实验结果对比Fig.6 Comparison of experimental results of fixed gain PID and Hamilton control
在t=60 s时速度开始变化,固定增益PID控制下张力随速度的改变出现较大的干扰,仅部分时间内符合工作张力的要求,随着速度的增大张力控制精确度降低,加减速时张力误差峰值增加,Dancer浮动较为强烈,所提控制方法在速度变化较大的情况下张力波动依然保持较小范围,降低纸带张力超调加快了系统响应速度,削弱了速度与张力之间的耦合,在整个工作阶段将张力的波动有效限制在允许的±4%范围内,并且Dancer位置能够保持在更小的浮动范围。
通过实验可以得到主轴绕制过程中绝缘纸带的切线速度按图7(a)所示曲线成周期性变化,张力变化如图7(b)所示。

图7 Hamilton控制下的主轴张力Fig.7 Spindle tension controlled by Hamilton
由于变压器铁心的几何形状为近似的椭圆形,绕制过程中纸带切线速度随芯轴长短半径呈周期变化,导致张力处于不断波动中并具有一定周期性,根据不同绕制速度下测试结果可以看出张力的波动在允许的±4%范围内。在固定增益PID张力控制与Hamilton反馈耗散张力方式下所绕制变压器绝缘层的情况如图8所示。

图8 不同张力控制方式下绝缘层绕制情况Fig.8 Winding of insulating layer under different tension control methods
为了不失一般性更好的对比分析不同控制器性能,通过定义两个准则来进行评估。第1个标准如下::
(37)
修正绝对误差标准积分,该指数可以提供每单位时间的标准H1值,对它分析能够评估系统跟踪参考值的性能和水平。第2个指标如下:
H2=max(‖∝(t)-∝ref‖),0≤t≤T。
(38)
该标准用于评估Dancer偏离参考位置的程度,衡量系统的去耦能力,当速度发生变化时对Dancer偏移位置以及系统张力的影响。

表2 控制器性能比较Table 2 Controller performance comparison
与固定增益PID控制相比较,所提出的控制方式不论在参考值的跟踪性能还是降低系统耦合方面的都有所提升,相反在固定增益PID控制方式下,位置与张力在参考值附近的波动较大,并且张力与速度之间的耦合较明显,但是通过合理整定参数仍然可以保持较快的响应速度。
5 结 论
在稳态运行过程中,收卷部分的张力扰动一部分是半径和惯量的时变特性引起的,但是主要由于芯模长短半径的周期性变化,绝缘纸带切线速度不断波动,导致张力周期性的偏离设定值。本文提出了一种基于Hamilton理论的张力控制系统,削弱张力与速度之间的耦合性,与传统PID控制方式比较有效降低椭圆形铁心变压器绝缘层绕制过程中张力波动的影响,拥有较强的自适应和抗干扰能力,在不同绕制速度下都能够较好的满足系统对张力控制的需求,可以解决人工进行变压器绝缘层绕制时效率低,一致性差的问题。虽然在本文控制方法下加减速时张力与Dancer位置的波动已经明显减小,但是在稳态运行时还可以观察到位置与张力在参考值附件存在微小振荡,出现这些现象的主要原因是辊的偏心和不圆度引起的,说明了从动辊动态特性对纸幅张力存在一定影响,在需要更高控制精确度的场合,可以通过增加基于从动辊摩擦模型的前馈控制提供有效的补偿量。
猜你喜欢
防爆电机(2021年4期)2021-07-28
合成材料老化与应用(2020年6期)2020-12-28
山西冶金(2020年5期)2020-11-13
中国造纸(2020年10期)2020-11-04
合成化学(2020年9期)2020-09-21
天津造纸(2019年2期)2019-01-14
中国重型装备(2016年4期)2016-12-19
锻造与冲压(2016年15期)2016-06-19
科技创新导报(2016年5期)2016-05-14
设备管理与维修(2015年12期)2015-04-09
