
草莓采摘机器人行走机构设计
2021-08-28 09:49李贇钊袁锐波徐成现
农业装备与车辆工程 2021年8期
李贇钊,袁锐波,徐成现
(650500 云南省 昆明市 昆明理工大学)
0 引言
草莓具有鲜美的味道与丰富的营养价值,很受消费者喜爱,该果实含有丰富的营养物质,如矿物质、氨基酸、多种维生素等等,素有“水果皇后”的美称。草莓采摘是草莓生产过程中必不可少的一个环节,在草莓的生产中采摘时间约占1/4,并且草莓成熟后应该尽快采摘,否则很快就会变质腐烂,而且每个草莓成熟的具体时间不同,所以,在草莓果实成熟期的特定时间段,草莓的采摘工作量还是很大的,况且在我国大都是个人种植草莓,采摘劳动力不足,采摘效率较低[1],将机械自动化技术引入草莓采摘行业很有必要。
草莓采摘机器人能够很大程度上节约劳动力,减少成本和提高经济效益,合理的行走机构对于草莓采摘机器人的高效而平稳的行走以及有效跨越障碍物十分重要。本文基于草莓采摘技术下的行走机构的设计与研究,以研究出高效率、低成本、运动平稳的行走机构。
1 草莓采摘机器人行走机构总体设计
1.1 行走机构车体设计
本设计主要针对我国大多数的地垄式草莓种植模式进行分析和研究,从而分析设计行走机构,可将机械手装配在行走机构上方在垄间进行行走,方便机械手的图像识别。工作示意简图如图1 所示。
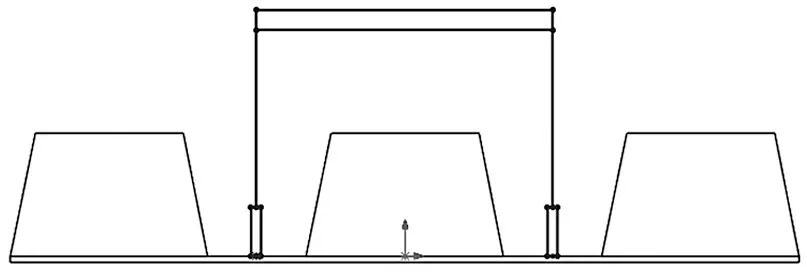
图1 行走机构与地垄位置关系示意图Fig.1 Schematic diagram of position relationship between travelling mechanism and ridge
根据草莓特定的地垄式种植而设计出此跨垄式行走机构。经实地测量,可得出地垄的大致参数如下:地垄呈等腰梯形,地垄的上面宽约400 mm,地垄的下面宽约600 mm,行走机构行走的通道的宽度(即垄与垄之间的横向距离)约为300 mm,地垄的高度大约是260 mm。根据地垄的形状尺寸,可以确定行走机构的车体结构形状和具体的尺寸。
根据工作环境和功能要求,行走机构上面应该设有采摘机械手的安装凸台和安装底座。当机械手将草莓采摘下来之后,要将草莓放置于盛装草莓的箱子里,所以行走机构上应设计有用于存放草莓的草莓盘,该盘子不用太厚,防止因太厚而压伤下面的草莓。由于机构为跨垄式行走,行走机构的驱动电机应该放置于机构的上面,所以行走机构上面设有载物台用于安装电动机。传动过程中涉及传动轴,故应设有带有安装轴承的支撑,以便将动力持续顺利而高效地传递下去。具体结构如图2 所示。

图2 行走机构搭载图Fig.2 Loading diagram of travelling mechanism
1.2 行走机构驱动系统设计
由于该行走机构进行动力传递的2 个传动轴中心距较大,还要考虑到行走机构的行走速度、行走机构的质量和行走时的稳定性以及工作效率等,并且是在竖直方向进行动力传递,所以,可以选用带传动或链传动。行走机构在草莓种植田间行走时,由于土壤比较松软,需要提供较大的传递动力,带传动过载就会过载打滑,而且不能有效保证传动比;而链传动可以传递较大的动力,没有打滑现象还可以保证精确的传动比,非常适合该行走机构的设计要求,所以,行走机构竖直方向的传动可以选择传力较大的链传动。
如图3 所示为行走机构驱动时的动力系统。直流电源将电能转换成电动机的机械能,通过齿轮传动、传动轴和链传动将动力传递给轮轴,进而使轮子旋转、机构行走。
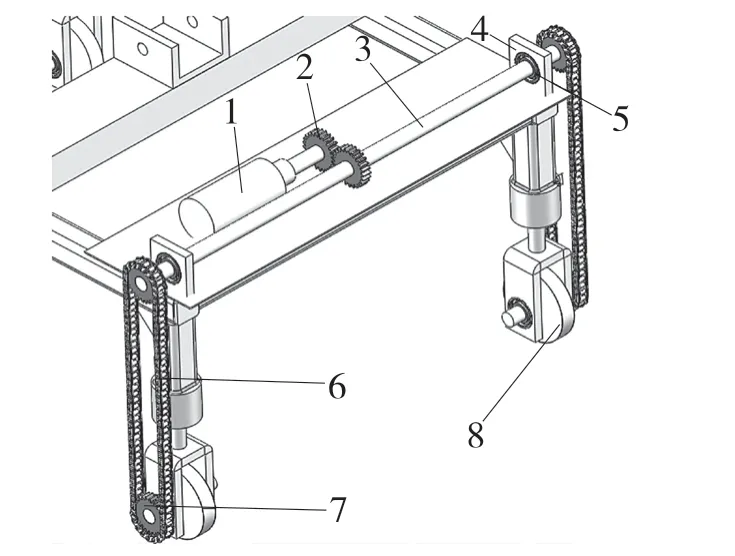
图3 行走机构驱动系统示意图Fig.3 Schematic diagram of driving system of travelling mechanism
1.3 转向机构设计
该行走机构为跨垄式行走,属于高地隙环境行走,所以其底盘离地面较高,通过性较好。为了使行走机构在转弯时车轮做纯滚动而不发生滑动[2],行走机构的前轮转角要满足阿克曼转向定理[3],就是行走机构在转弯时各个车轮必须围绕着一个中心点O 转动,即转弯时所有车轮的轴线应交于一点O,并且把O 点称为转弯中心。转弯示意图如图4 所示。

图4 行走机构转弯示意图Fig.4 Turning diagram of traveling mechanism
转弯时内转向轮所转过的角度应大于外转向轮所转过的角度,并且左右转向轮所转过的角度应满足如下关系[4]:

根据以上的假设情况,可将转向机构设计为整体式梯形转向机构,该平面整体式转向机构是由转向摇臂、转向横拉杆和梯形臂组成[5]。转向机构三维图见图5。行走机构的转向通常采用液压作为转向的动力源,转向机构又可分为2 部分:机械传动和液压传动。液压系统由液压缸、液压泵、转向器、管路接头组成,此处暂时不做详细研究。
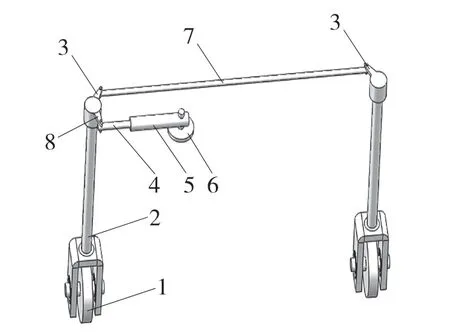
图5 转向系统示意图Fig.5 Schematic diagram of steering system
整个行走机构的装配三维图如图6 所示。
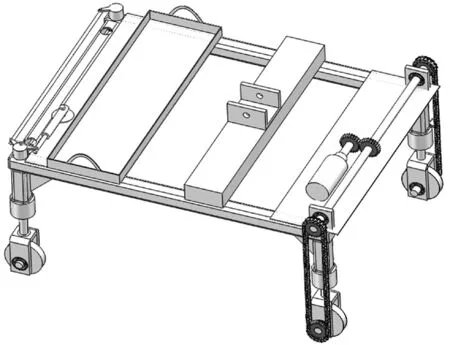
图6 行走机构整体装配图Fig.6 Overall assembly drawing of traveling mechanism
2 行走机构的运动仿真
ADAMS 软件是现今使用非常广泛的一种机械动力学仿真软件,是目前世界上使用范围最广、可靠性最高的机械运动仿真分析软件[6]。ADAMS软件仿真结果具有判断机械系统的运动性能和范围以及碰撞检测等功能。该软件使用零件库和力库,约束库,交互式的图形[7]来创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论的拉格朗日方程法[8],可以建立动力学方程,可对模拟的样机进行动力学、静力学和运动学分析,进而可以输出速度、加速度和位移等的运动曲线[9]。ADAMS 软件在工程机械、汽车工程、工业机械等领域应用十分广泛[10]。
行走机构的实际模型是较复杂的机械系统,包括了很多的连接标准件、安装造型和零部件的工艺结构,因此在进行仿真时,可以进行适当的模型简化和抽象。为了得到较为准确的仿真结果,使仿真结论和实际的运行情况基本吻合,需要对各个部件间的运动方式、约束关系和装配方式进行深度分析。
2.1 简化模型
通过布尔操作将相互固定的2 个零件合并成1 个零件,主要是车架上的各个零件,从而达到简化模型的目的,并将各个零件分配不同的颜色加以区分,如图7 所示。
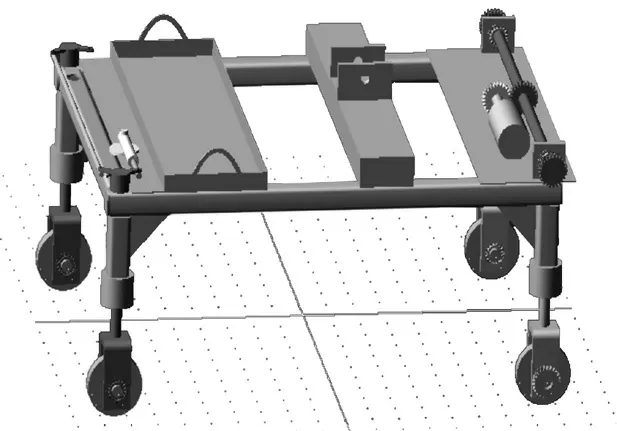
图7 固定区分零件图Fig.7 Fixed distinguishing parts
因为链传动设置繁琐,此处不考察链传动的运动关系,因此将链条省略,后续以其他约束副代替。
2.2 建立驱动
根据采摘机器人在温室的实际作业情况,仿真时可以设定行走机构速度为400 mm/s;小轮半径为50 mm;角速度为8 rad/s,转换为角度制为458.37 °/s。因为各个齿轮传动比皆为1:1,因此在电机驱动轴上添加joint motion,设置函数为:step(time,0,0,5,458.37 d)+step(time,51,0,56,-458.37 d),表示驱动转速在0~5 s 内加速到458.37 d/s,5~51 s 内转速保持不变,51~56 s 内减速到0,如图8 所示。
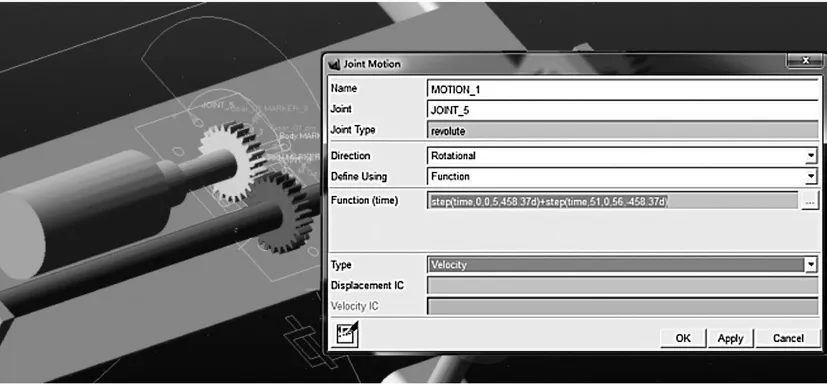
图8 设置函数图Fig.8 Setting function diagram
2.3 仿真结果分析
经过一系列的准备和操作,可得出测量点的速度图像如图9 所示。由图像可知,在0~5 s 时,行走机构做加速行走,此后在匀速行驶时,速度基本保持匀速行驶,但在转弯时速度发生了下降,主要是因为行走机构的后面两个轮子没有转向功能,在转弯时行走机构后面的轮子没有做纯滚动而是发生了滑动的现象。整个行驶过程机构的速度都在不断波动,但波动量较为微小,可忽略不计。发生速度波动的原因是行走机构在行走时存在不可避免的机械振动,且在转弯时的速度波动要比匀速行驶时的速度波动稍大一些,说明转弯时的机械振动要比直线行走时的机械振动大些。转弯结束后,行走机构继续匀速行走。最后行走机构减速直至速度为零。
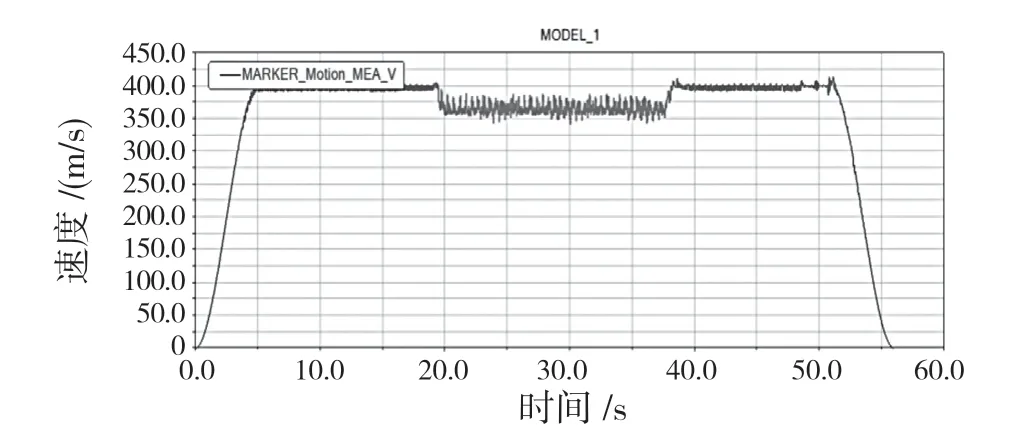
图9 仿真速度图像Fig.9 Simulation speed image
3 结语
本文针对地垄式草莓种植方式和所需采摘机器人行走机构的功能特点,对行走机构的关键部分进行研究和设计,具体包含以下几方面:
(1)针对特定的地垄式草莓种植情况,设计了适合地垄式草莓采摘机器人行走机构的车体部分,并确定了车体的主要尺寸和所使用材料;根据行走机构的工作环境设计出了合理的驱动系统和转向系统;确定了行走机构的行走方式,分析了各机构的工作原理,明确了行走机构所应具有的部分功能;使用SolidWorks2012 三维软件绘制出了行走机构的车体和主要的传动系统图。
(2)利用ADAMS 仿真软件对行走机构的运行进行了仿真实验,仿真结果表明,该机构能够较为平稳地进行运动、转弯和采摘作业,有较大的实用意义和推广意义;能够有效提高草莓采摘的效率,大大节省劳动力成本。
猜你喜欢
英语文摘(2022年4期)2022-06-05
汽车实用技术(2022年7期)2022-04-20
南方农机(2021年1期)2021-01-20
房地产导刊(2020年11期)2020-12-28
现代营销·理论(2019年10期)2019-09-10
当代陕西(2019年8期)2019-05-09
阅读与作文(小学高年级版)(2017年10期)2017-10-11
中国高新技术企业(2015年16期)2015-04-30
