
基于非线性级联系统的弹性关节空间机器人新型滑模控制1)
2021-08-30 10:20秦开宇
力学与实践 2021年4期
梁 捷 秦开宇 陈 力
∗(电子科技大学航空航天学院,成都611731)
†(中国空气动力研究与发展中心,四川绵阳621000)
∗∗(福州大学机械工程及自动化学院,福州350116)
空间机器人系统能在航天器在轨服务技术中发挥重要作用[1-9]。在以往的研究中,许多学者关注了空间机器人系统中机械臂臂杆的柔性控制问题[10-13]。但需引起注意的是,弹性关节控制被认为比臂杆柔性控制更具挑战性[14-15]。由于空间机器人关节系统设计中使用了大量谐波减速器等柔性元件,因此在空间机器人控制系统设计中若不考虑关节弹性振动,将会对控制精度及稳定性造成很大影响[14-16]。
当前,弹性关节空间机器人的控制算法主要分为奇异摄动法[14,17]和基于柔性补偿的奇异摄动法两类[18]。刘福才等[17]基于奇异摄动法,将柔性关节空间机器人分解为快、慢变子系统,并分别设计控制器,但该方法仅适用于弹性关节刚度较大的情况;陈志勇等[18]建立了基于柔性补偿的奇异摄动修正模型并设计控制器,虽然可以应用于刚度较小柔性关节空间机器人的控制中,但随着关节柔性刚度的进一步减小,控制效果并不理想。再者,由于奇异摄动分解理论的束缚,以上两类控制算法很难运用于位置不控、姿态受控的空间机器人动力学模型。
近年来,滑模控制在空天领域得到广泛应用[19-21]。戴巧莲等[22]提出了一种基于干扰观测器的空间机器人反步控制算法,但其观测器设计的不足是:需测量角加速度,同时要求质量阵中主对角线上的项必须为常数;米根锁等[23]设计了一种基于干扰观测器的机械臂非线性滑模控制策略,其在干扰观测器设计时假设干扰的变化是缓慢的,但这在实际应用中很难做到。
鉴于以上研究现状,为实现弹性关节空间机器人在关节柔性刚度较小情况下的轨迹跟踪及弹性振动控制问题,本文拟基于非线性级联系统的概念建立双臂弹性关节空间机器人系统动力学方程,并在此基础上设计一种基于放宽条件改进型非线性干扰观测器(nonlinear disturbance observer,NDO)的新型自适应动态终端滑模控制算法及力矩反馈控制算法。该算法可用于关节柔性刚度较小情况下空间机器人轨迹跟踪及抑制弹性关节振动。
1 级联动力学建模
目前,对空间机器人准确执行自主操作任务的要求不断提高,这导致了对轻量化材料和机构的需求增加。因此,关节柔度效应变得非常重要,是实现空间机器人良好轨迹跟踪性能的主要限制因素。文中应用图1所示的双臂弹性关节空间机器人系统开展改进型NDO、新型自适应动态终端滑模控制系统及关节弹性振动控制系统设计,图1所示双臂弹性关节空间机器人系统由载体B0,左、右臂B1,B2,B3,B4及柔性关节O1,O2,O3,O4组成。建立惯性坐标系xOy及分体Bi(i=1,2,3,4)的连动坐标系xiOiyi;此外,图中θ0为系统载体姿态实际转角,θim(i=1,2,3,4)为各关节驱动电机转子转角变量,θi(i=1,2,3,4)为各操作臂Bi(i=1,2,3,4)刚性连杆转角变量,P2和P4为负载。

图1 双臂弹性关节空间机器人
1.1 弹性关节简化模型
空间机器人弹性关节一般采用谐波减速器装置,这些齿轮机构因其具有高减速比、体积小、重量轻、同轴装配等优点而在空间机器人应用中受到越来越多的关注。然而,对于谐波减速器装置,柔轮的弹性振动是控制系统开发面临的重大挑战。文中将弹性关节假设为一个线性扭转弹簧[24](如图2所示),θm和τm为电机转角和电机力矩。

图2 柔性关节示意图
1.2 动力学建模
考虑双臂弹性关节空间机器人系统,假设每个关节被建模为恒定刚度的线性扭转弹簧[24],其非线性动力学模型是由拉格朗日公式在系统中存储的动能和势能导出的,具体建模过程如下。
由系统总质心定义及位置几何关系,可导出

其中,ri(i=0,1,3)为Bi的质心OCi(i=0,1,3)相对惯性坐标系原点O的矢径,r2为载体B2与载荷P2所组成的联合体的质心OC2相对惯性坐标系原点O的矢径,r4为载体B4与载荷P4所组成的联合体的质心OC2相对惯性坐标系原点O的矢径,Lij(i=0,1,2,3,4;j=0,1,2,3,4)均为系统惯性参数的组合函数,ej为xj轴的基矢量。
取系统广义坐标矢量Q=[θ0,θ1,θ2,θ3,θ4,θ1m,θ2m,θ3m,θ4m]T。系统总动能为系统动能Tr和电机转子动能Tθ之和。因此,有

式中,Tr=T0+T1+T2+T3+T4;Tθ=Tθ1+Tθ2+Tθ3+Tθ4;载体B0、机械臂B1和机械臂B3的动能分别为机械臂B2与载荷P2所组成的联合体动能为机械臂B4与载荷P4所组成的联合体动能为关节Oi处电机转子的动能其中,分别为载体B0、机械臂B1和机械臂B3的质量;J0,J1,J3分别为载体B0、机械臂B1和机械臂B3的转动惯量;m2P2和J2P2分别为机械臂B2与载荷P2所组成联合体的质量和转动惯量;m2P4和J2P4分别为机械臂B4与载荷P4所组成联合体的质量和转动惯量;ω0,ω1,ω3分别为载体B0、机械臂B1和机械臂B3的角速度;ω2,ω4分别为机械臂B2与载荷P2所组成联合体和机械臂B4与载荷P4所组成联合体的角速度;Jθi(i=1,2,3,4)为电机转子的转动惯量;z为中间变量。
在太空微重力条件下,系统的总势能U表达为
式中,Kim(i=1,2,3,4)表示第i个弹性关节的扭转刚度。不失一般性,假设系统的初始动量、动量矩为零,即˙rC=0,于是系统动量、动量矩守恒关系可表示为

利用式(1)∼式(5)、拉格朗日法及Spong假设,可导出双臂弹性关节空间机器人级联动力学方程

其中,式(6)为机械臂动力学模型,式(7)为关节动力学模型,两模型式之间通过机械臂端输入力矩τ而连接;M(q)∈R5×5为质量阵;R5×1为离心力、科氏力矢量,且对于任选列向量Z∈R5均满足:θ2θ3θ4]T为载体姿态角与关节角组成的向量。θm=[θ1mθ2mθ3mθ4m]T和Jm=diag(J1mJ2mJ3mJ4m)分别为关节电机的转角列向量和对称正定转动惯量阵;Km=diag(K1mK2mK3mK4m)为扭转刚度阵,Kim(i=1,2,3,4)表示第i个弹性关节的扭转刚度;τ0为载体姿态角控制力矩;τm∈R4为关节电机实际输出力矩列向量。转角误差δ=θm−θ。
为更好设计双臂弹性关节空间机器人控制器,建立了式(6)∼式(8)组成的空间机器人级联动力学方程,因为级联系统在限定范围内具有全局渐近稳定性,因此,更加适用于弹性关节空间机器人控制器设计[25-26]。
2 控制算法设计
本研究提出的控制策略采用基于非线性级联系统的方法。该方法应用于柔性关节空间机器人,为设计控制算法提供了一种思路。该控制算法的基本思想是:首先,将整个空间机器人系统视为由机械臂动力学模型、关节动力学模型及两模型式之间通过机械臂端输入力矩τ而连接组成的级联系统;其次,为这两个动力学模型分别设计具有级联关系的内、外环控制器;再次,将关节输出电机转子转角θm视为机械臂动力学模型的控制变量,设计虚拟的电机转角θfm以实现关节轨迹跟踪控制;而后,针对关节弹性易产生振动的实际工况,设计τm,使电机输出转角θm跟踪虚拟控制量θmf,即使机械臂端的实际输入力矩τ=Kmθm快速跟踪机械臂的虚拟输入力矩ˆτ=Kmθmf(其中∆τ=τ−ˆτ代表了关节弹性振动),从而抑制关节弹性振动。文中级联控制原理如图3所示,qd为载体姿态及关节角的期望轨迹。

图3 级联控制原理图
2.1 机械臂动力学模型控制算法设计
文中机械臂动力学模型式(6)采用基于放宽条件改进型NDO的新型自适应动态终端滑模控制算法,其算法设计思路是:为有效消除参数不确定和未知干扰对空间机器人控制性能的影响,首先设计放宽条件的改进型NDO对系统集中不确定项D进行估计,并证明观测误差的收敛性,然后,再对其与实际估计用新型自适应终端动态滑模控制来补偿,系统控制框图如图4所示,d为外部扰动力矩。

图4 机械臂动力学模型控制框图
为便于算法设计,将机械臂动力学模型式(6)写为

2.1.1 放宽条件的改进型NDO设计及稳定性分析


定义NDO观测误差为

由式(9)和式(10)可得观测器动态方程

观测器增益函数选取为

其中,X为可逆的正定常数矩阵,由式(11)得

定理1:针对机械臂动力学模型式(9),设计改进型NDO式(10),其观测器增益函数选取如式(14),辅助矢量函数为式(15)。在下列假设成立的情况下,观测误差能以指数收敛率收敛于相应区间。若扰动为缓慢信号,即˙D≈0,则观测误差将收敛于零。
假设1:存在一个对称正定矩阵Γ,满足不等式

假设2:集中不确定项的变化率有界,即∃k>
有观测器观测误差全局一致最终有界,并以(1−ξ)λmin(Γ)/(2σ2)‖X‖2收敛,收敛区间半径为2kσ2‖X‖2/[ξλmin(Γ)](0<ξ<1)。
证明:构建改进型NDO的正定Lyapunov函数

式(17)对时间求导,得
因此,得


考虑正定Lyapunov函数式(17)、式(16)和式(19),可得

利用Rayleigh-Ritz不等式[27]



可得

即

由式(25),得

结合Rayleigh-Ritz不等式(22)及式(21),得

由于Γ是对称正定矩阵,因此

由式(26)∼式(28),可得

其解析解为

由式(17)及Rayleigh-Ritz不等式(22),得

再结合式(30)和式(31),可得

可见,观测误差能以指数收敛率收敛于λmin(Γ)/(2σ2‖X‖2)相应区间。若扰动为缓慢信号,即≈0,则观测误差将收敛于零。
证毕。
然而,基于扰动为缓慢信号的假设是很难满足工程实际需要的,这限制了NDO的应用,因此,针对该情况,放宽对扰动信号变化率的限制,在新的条件下设计改进型NDO。
假设系统扰动变化率放宽为

式中,σ为未知正常数,则观测误差动态方程为

求解式(34),得

因此,观测器误差可收敛到球域内

式中,r(Bd)为球域半径,通过设计可使得r(Bd)足够小。
2.1.2 新型自适应动态终端滑模控制算法设计
由于空间机器人系统存在系统动量守恒约束关系,所以上节设计的放宽条件改进型NDO也很难精确估计系统集中不确定项D,假定补偿后仍存在观测误差且满足不等式基于此,本节设计新型自适应终端动态滑模控制算法对观测误差进行有效补偿。该算法显著优点为:通过采用自适应动态滑模切换项,克服了惯常滑模趋近律需要预知不确定上界的缺点,因为对于复杂系统,不确定上界是很难预知的;同时,降低高频抖振提高了控制精度。
该控制算法由等效控制项和切换控制项两部分组成,具体设计步骤如下。
首先,设计滑模面

式中,e=qd−q为跟踪误差;α,β∈R5×5为对角正常数矩阵。

再次,设计自适应动态滑模切换项

式中,n为正常数,g(t)为待设计的参数。
将等效控制项式(40)、动态滑模切换项式(41)及放宽条件改进型NDO的补偿项ˆD结合起来,则机械臂动力学模型式(9)的控制律为

定理2:针对式(9)描述的双臂弹性关节空间机器人机械臂动力学模型,如果滑模面设计为式(39),结合放宽条件的改进型NDO式(10),采用新型自适应动态终端滑模控制算法为式(42),选取参数和的自适应律分别为

式中,ρi(i=0,1,2)为学习率,则系统渐近稳定收敛。
证明:取Lyapunov函数



为保证系统状态能够运动到滑模面上,控制算法应满足滑动模态条件,即当设计

式中,λ为正常数矩阵。
将式(43)、式(45)和式(46)代入式(44)可得
式中,n和ε为正常数。因此,被控系统渐近稳定收敛。其中,推导过程使用的范数默认为2-范数的平方。在工程实践中,要进一步降低滑模控制中存在的高频颤振以提高控制精度,在式(42)中,利用函数tanh(·)代替符号函数sign(·),则机械臂动力学模型式(9)的控制律式(42)改进为

2.2 关节动力学模型控制算法设计
空间机器人关节的弹性振动给机器人的控制带来了很大的挑战,如果在控制系统设计中忽略了关节柔度的影响,会导致系统不稳定甚至失控。基于此,文中设计基于力矩反馈的内环控制律τm来抑制关节谐波减速器装置引起的弹性振动。∆τ=τ−ˆτ代表弹性关节的弹性振动特性。即,设计关节电机驱动力矩τm,使τ快速跟踪ˆτ。
设计基于力矩反馈的关节动力学模型控制律

其中,k2,k3均为设计参数。将式(49)代入式(7),可得

由式(50)可得

由于,k2/k3>0,因此关节动力学模型的闭环控制系统有界输入、有界输出稳定性。
综上所述,双臂弹性关节空间机器人的控制系统由式(7)∼式(9)、式(48)和式(49)组成,控制律式(48)和式(49)存在级联关系。相较于奇异摄动控制方案,基于级联法的控制算法的显著优点是:控制方案理论上不受关节刚度大小的约束,同时,能够运用于文中位置不控,姿态受控这种电机转子数与关节数不对等的弹性关节空间机器人数学模型。
3 仿真研究
为了校验本文提出的改进型NDO设计、新型自适应动态终端滑模控制和弹性振动抑制控制算法的有效性,对图1所示的双臂弹性关节空间机器人系统进行数值仿真,仿真选取的模型参数:载体B0的质量和转动惯量分别为m0=40 kg,I0=34.17 kg·m2;两臂首杆的质量和转动惯量分别为m1=m3=40 kg,I1=I3=1.5 kg·m2;两臂末杆的质量和转动惯量分别为m2=m4=1 kg,I1=I3=0.75 kg·m2;设柔性关节Oi(i=1,2,3,4)的扭转刚度为Ki=15 N·m/rad(i=1,2,3,4),关节电机转子转动惯量为Ji=0.8 kg·m2(i=1,2,3,4);O0沿x0,y0方向距O1(O3)长度为Lx=2 m,Ly=1 m;左、右臂B1,B2,B3,B4的杆长为Li=2 m(i=1,2,3,4)。
设系统仿真时间t=10 s,利用控制律式(48)和式(49)对图1所示空间机器人系统进行数值仿真,各臂杆关节运动轨迹为θ0d=sin(πt/4)/3,θ1d=cos(tπ/3)+π/3−1,θ2d=sin(tπ/3)+π/3,θ3d=cos(tπ/3)+2π/3−1,θ4d=sin(tπ/3)−π/3.θ0d,θ1d,θ2d,θ3d和θ4d的单位为rad,且系统初始构型为θ(0)=[0.2,0.8,1.2,1.8,−0.8]Trad,θm(0)=[0.8,1.2,1.8,−0.8]Trad。
控制参数选择为α=β=diag(5,5,5,5,5);X−1=diag(120,120,80,120,80);k2=20;k3=1;n=ε=4。
用于比较的控制方案中参数k4=k3;k5=k2;k6=k3。
参数自适应律的初始值为ηi=0。
为验证文中设计级联控制算法的有效性,仿真将对以下两种算例进行讨论比较,仿真结果如图5∼图10所示。

图10 右臂关节角θ3,θ4的三种控制算法轨迹跟踪图(关节柔性刚度15 N·m/rad)
3.1 算例1:开启/关闭改进型NDO及自适应律
图5∼图7分别给出了文中设计控制算法在开启和关闭系统中观测器补偿项ˆD及式(29)中参数,和自适应律情况下,载体姿态角关节角θ0的对比情况,左臂关节角θ1和θ2的对比情况,右臂关节角θ3和θ4的对比情况,可以看出,若没有对文中自适应终端动态滑模控制算法进行观测器估计及动态滑模参数自适应律设计,仅通过动态终端滑模控制会大大降低空间机器人的控制精度。

图5 载体姿态角θ0轨迹跟踪图(观测器和参数自适应律开启与关闭)
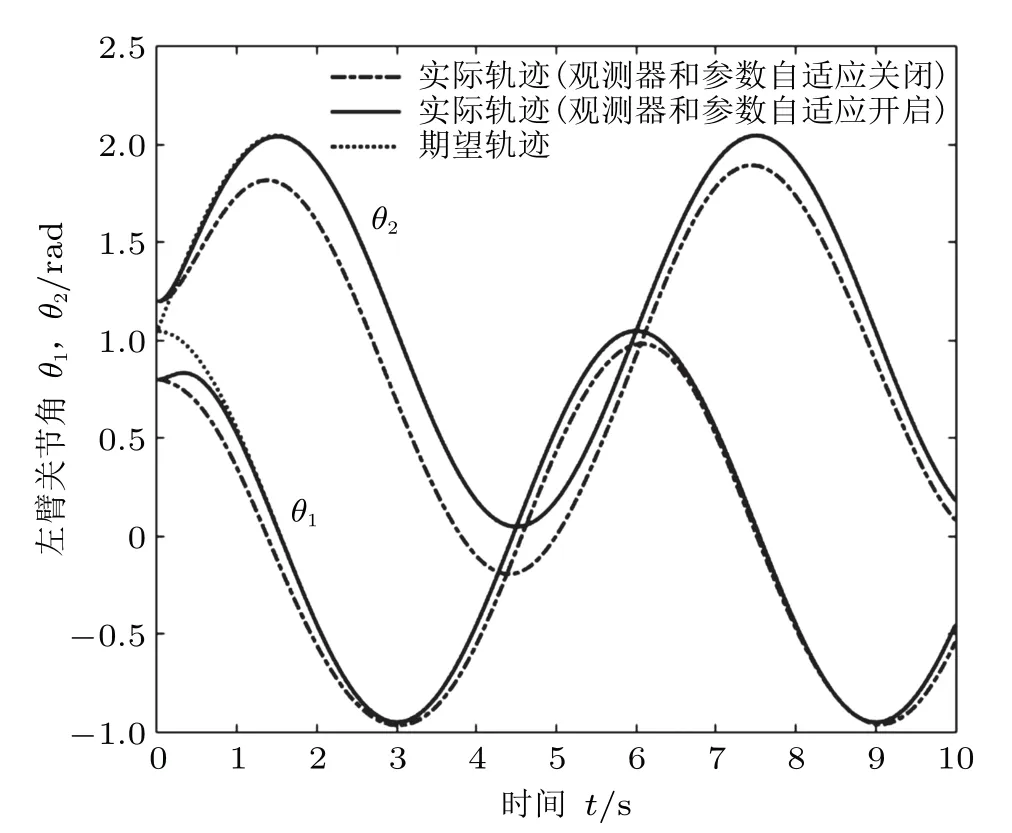
图6 关节角θ1和θ2轨迹跟踪图(观测器及参数自适应律开启与关闭)

图7 关节角θ3和θ4轨迹跟踪图(观测器及参数自适应律开启与关闭)

图9 左臂关节角θ1,θ2的三种控制算法轨迹跟踪图(关节柔性刚度15 N·m/rad)
3.2 算例2:文中控制算法与奇异摄动法及基于柔性关节补偿奇异摄动法的比较
本算例中,在相同关节刚度Ki=15.0 N·m/rad(i=1,2,3,4)情况下,分别采用文中控制算法与基于文献[14]的奇异摄动法以及基于文献[18]柔性关节补偿的奇异摄动法对双臂弹性关节空间机器人控制时进行对比仿真,仿真结果如图8∼图10所示。可以看出,当关节柔性刚度较小时,文献[18]基于关节柔性补偿控制器的奇异摄动控制算法和文献[14]奇异摄动控制算法在初始阶段均无法跟踪期望轨迹,而文中设计的基于非线性级联系统的控制算法能够精确跟踪期望轨迹。

图8 载体姿态角θ0的三种控制算法轨迹跟踪图(关节柔性刚度15 N·m/rad)
4 结论
空间机器人控制系统设计中若不考虑关节弹性振动,将会对控制精度及稳定性造成很大影响。为此,本文依据非线性级联系统的概念,设计了一种基于放宽条件改进型NDO的新型自适应动态终端滑模控制算法及力矩反馈控制算法。通过仿真可知:当关节柔性较小时,文中所提出的控制方案可精确完成空间机器人轨迹跟踪并抑制弹性关节振动,而此时,文献[14]奇异摄动控制算法基本失效,文献[18]基于关节柔性补偿控制器的奇异摄动控制算法也未能完全精确跟踪;同时,若没有对文中机械臂动力学模型式的控制律式(42)进行观测器估计及自适应动态滑模切换项设计,仅靠非奇异终端滑模控制会大大降低空间机器人的控制精度。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
选煤技术(2022年2期)2022-06-06
大电机技术(2022年2期)2022-06-05
湖北工业大学学报(2021年2期)2021-04-28
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
汽车文摘(2016年11期)2016-12-08
