V形犁式无沟铺管机牵引力需求
2021-09-02 12:50郭大方胡小安耿冠杰杨录录周坤雷
农业工程学报 2021年10期
郭大方,陈 坤,2,胡小安,耿冠杰,2,姚 强,2,杨录录,2,周坤雷,2
V形犁式无沟铺管机牵引力需求
郭大方1,陈 坤1,2※,胡小安1,耿冠杰1,2,姚 强1,2,杨录录1,2,周坤雷1,2
(1. 中国农业机械化科学研究院,北京 100083;2. 北京天顺长城液压科技有限公司,北京 100083)
V形犁式无沟铺管机结构简单、施工效率高、成本低,是黄河冲积平原适宜的暗管施工装备,其牵引力需求与暗管埋深的关系是整机设计的理论基础。该研究基于V形犁式无沟铺管机结构与原理,通过分析犁具工作阻力与履带行驶阻力,构建牵引力需求力学模型。结合现场特定的土壤物理性质,采用有限元与光滑粒子流体动力学耦合法,完成显式动力学仿真,得出暗管埋深为0.4、0.6、0.8、1.2和1.6 m时的犁体工作阻力分别为35.65、55.71、111.06、201.80和313.22 kN,回归结果验证了理论分析。结合机器传动系统特点,通过检测牵引功率和车速获取不同埋深作业时的牵引力大小,基于中心复合设计方法开展牵引力试验研究。试验结果表明,暗管埋深与其平方项对牵引力需求的影响显著(<0.001),作业速度及其与埋深交互项影响不显著(>0.05);犁体工作阻力的试验与仿真回归模型的最大相对误差不超过20%,表明仿真结果真实可信。研究方法与结论可为针对不同土壤条件、不同管径和不同埋深,研发V形犁式暗管铺设机器提供设计参考。
农业机械;仿真;试验;无沟铺管机;牵引力需求
0 引 言
开沟铺管机和无沟铺管机是农田暗管排水工程的核心施工装备,开沟铺管机适用于排水管直径、排水管埋深和地下水埋深较大的施工工程,而无沟铺管机则更适合排水管和地下水埋深较浅的工程。无沟铺管机分为V形犁和心土犁两种形式,比开沟铺管机结构简单、施工效率高、成本低[1]。其中,V形犁式铺管机工作阻力和对土壤的扰动较小,心土犁铺管机的结构更为简单,但在作业过程中会劈裂和挤压土壤,导致土壤渗透性下降。
无沟铺管机虽在欧美广泛应用,但目前可供借鉴的理论和试验研究文献鲜见。De Wilde[2]研究发现无沟铺管机作业效率随暗管埋深增加而迅速降低,Ritzema[3]通过作业数据统计得出无沟铺管机作业速度快的优势随着暗管埋深的增大而迅速减小。Fouss[4]依据经验提出无沟铺管机牵引力需求与暗管埋深呈二次或三次函数关系,在重黏土中暗管埋深每增加2.5 cm,牵引力增加约4.5 kN。亨克·尼兰等[5]依据经验指出,无沟铺管机牵引功率需求与暗管埋深呈平方关系。Islam等[6]针对某心土犁式无沟铺管机开展的试验研究,显示在当地土壤环境下,45 cm埋深所需牵引力约为40 cm埋深的两倍。Machado等[7]通过理论计算与试验对比,得出最符合当地土壤条件的心土犁式无沟铺管机牵引力需求预测模型。上述研究虽方法不一,内容不同,结论各异,但均显示暗管埋深是决定无沟铺管机牵引力需求的主要因素。
针对黄河冲积平原采用暗管排水控盐技术修复脆弱盐碱土壤环境的需要,作者所在团队自“十三五”起开展了无沟铺管机的研发工作,并研制出国内首台PV1509HT型V形犁式无沟铺管机。本研究将基于该机的结构与工作原理,通过力学分析,建立牵引力需求理论模型;基于有限元法(Finite Element Method,FEM)与光滑粒子流体动力学法(Smooth Particle Hydrodynamics,SPH)耦合的显式动力学仿真,初步验证理论模型;基于中心复合设计方法(Central Composite Design,CCD)开展试验研究,验证理论与仿真分析结果。从而在特定试验条件下,揭示牵引力需求与暗管埋深之间的基本关系,验证PV1509HT型原型机设计的合理性和改进方向,拟为新机型的研发提供理论支撑。
1 V形犁结构与原理
1.1 结构特点与参数
PV1509HT型无沟铺管机(图1)由主机、悬挂架和犁体组成,重约30 t,长×宽×高约11.6 m×3.3 m×3.3 m。
主机采用双泵双回路全液压传动系统(图2),发动机动力经分动箱均分给左、右行走泵,再由各行走马达、减速机、驱动链轮分别驱动左、右履带行驶。
犁体由管梁和犁翼上下两部分组成(图3)。其中,管梁及周围结构用于连接犁体与悬挂架,犁翼用于切削、举升土壤并埋设暗管。犁翼采用左、右对称设计,外缘设有用于切削土壤的犁刀,内部为中空结构,设计有用于提高强度的隔板。左侧犁翼内单独设有引导暗管埋设的导管。
1.管梁 2.内壁 3.犁翼板 4.犁刀 5.导管 6.内隔板
1.Tubular beam 2.Inner plate 3.Plow wing plate 4.Cutting edge 5.Pipe conduit 6. Spacer plate
注:为暗管埋深,m;1为耕深,m;为犁体举升土壤的高度,m;为犁翼夹角的一半,(°);为导管外径,m;为导管曲率半径,m;为犁翼法向厚度,m;为内壁折角,(°);为内壁尾段长度,m。
Note:is installation depth of the subsurface drain pipe, m;1is plowing depth, m;is the height of soil lifted by the plow body, m;is half of the angle between plow wings, (°);is the outer diameter of the pipe conduit, m;is the radius of curvature of the pipe conduit, m;is the normal thickness of plow wing, m;is the inner wall folding angle, (°);is the length of the inner wall tail segment, m.
图3 犁体结构示意图
Fig.3 Schematic diagram of plow body
犁体能够铺设埋深≤1.6 m的暗管。为适应更多土壤条件,犁翼夹角2参照文献[2, 8-9]取70°。为实现逐渐加载,后倾角取72°。为保证外径≤125 mm的管道能够顺畅埋设,导管外径取150 mm,曲率半径取380 mm。为最小化犁体体积,犁翼内部应恰好容纳导管,因此法向厚度等于导管外径与犁体板材厚度之和,取170 mm,内壁折角取21.5°,内壁尾段长度取430 mm。
1.2 作业原理
为保证施工过程中正常排水,暗管总是从下游向上游方向安装(图1)。作业前,主机牵引犁体在明沟自行入土,或通过挖掘机开挖的起始槽入土。作业时,犁体切开土壤,并掀起三角形土垡,柔性波纹管道借助辊轮沿机身展开,通过犁体内部的导管进送至土垡下方。期间,机载控制器以激光信号或卫星定位信息为基准,实时调整悬挂架动作,提升犁体,使暗管高程满足坡降要求。犁体经过后,土垡在重力作用下回落。机器到达暗管末端预定位置后,驾驶员操纵悬挂架,使犁体完全离开地面,切断管道并封堵管口。在返程途中用履带将土垡压实,结束单条暗管安装。
2 牵引力需求理论分析
V形犁式无沟铺管机作业时,牵引力需要克服犁体工作阻力和履带行驶阻力,即:
2.1 犁体工作阻力
忽略土壤挤压变形,犁体工作阻力由切削阻力、举升阻力和摩擦阻力组成,如式(2)所示。
2.1.1 切削阻力
由图3中的几何关系,单侧犁刀参与切削的长度与暗管埋深成正比,如式(3)、(4)所示。
则切削阻力为[10-11]
因此可得,切削阻力与埋深成正比,即
2.1.2 举升阻力
其中
其中
则由式(7)~(13)可得
实际应用中,PV1509HT型铺管机作业速度一般在1 km/h左右,因此式(14)中的速度项相对很小,可忽略不计,则式(14)可以简化为
2.1.3 摩擦阻力
铺管机作业时,悬挂架始终承载犁体与土垡的全部重力,理论上犁体外壁对周围土壤没有挤压作用。因此,摩擦阻力仅由其内壁与土垡间的摩擦产生,外壁与土壤间的摩擦忽略不计。

注:利用图中阴影面将土垡分为土垡A与土垡B;为方便展示,将坐标系OOO、AAA和BBB分开绘制,实际上三者的原点重合。
Note: The furrow slice is divided into soil furrow slice A and B by the shaded surface in the figure. To show coordinate systems clearly, theOOO、AAAandBBBare drawn separately. In fact, the origin of the three coordinate systems coincides.
图4 犁体坐标系转换及受力分析
Fig.4 Coordinate transformation and force analysis of plow body
将犁体内壁A1、B1面受的正压力与摩擦力分别表达为坐标系AAA和BBB中的向量形式,然后通过坐标旋转变换得到各力在绝对坐标系OOO中的向量表达,即
4 田间试验
田间试验研究牵引力需求与暗管埋深间的关系,以验证理论与仿真结果一致性。
4.1 试验原理
结合PV1509HT无沟铺管机传动系统特点(图2),通过检测左、右行走泵输出功率并求和,可获得总牵引功率,如式(36)所示。
总牵引力与作业速度的乘积为牵引功率,可求得总牵引力为
4.2 试验材料与方法
试验地块位于山东省德州市庆云县单屯村,东经117.52°北纬37.90°。该区域0~0.2 m深的土层质地为砂壤土,0.2~0.6 m深的土层质地以中壤土、重壤土为主,0.6~1.6 m的土层质地以重壤土、黏土为主,土壤物理性质参数见表1。试验时间为2020年10月26-31日,试验时平均气温16 ℃,风速2级,气压102.6 kPa。
试验测试系统(图8)采用2只WebTec CT600流量计(量程15~600 L/min)和2只CYYZ11压力传感器(量程0~60 MPa),检测左、右行走泵流量和压力,借助HYDAC HMG4000测量仪实时监测和记录流量和压力数据。
采用精度为2 cm的激光系统控制暗管埋深,使用定位精度高于2 cm的BDS-RTK系统控制行走直线性和作业速度。
试验前:平整地面,挖掘起始槽,并从起始槽开始,划定包含10 m起步段、30 m测试段和30 m减速段的试验区。试验时:在起始槽内将犁体调整至目标埋深。在起步段内完成犁体入土,机器加速至目标速度后保持稳定。机器进入测试段时开始采集数据,直至离开测试段后结束。最终机器在减速段内停止。每组试验按此方法重复3次,取平均值。
4.3 试验设计与结果
基于前述理论与仿真分析,牵引力与暗管埋深的关系并非线性。此外,牵引功率既与暗管埋深有关,也与作业速度有关,为考虑作业速度对试验的影响,引入作业速度为试验因素。因此,针对这一非线性的2因素问题,以暗管埋深和作业速度为影响因素,以牵引力为响应,采用中心复合方法[25-27]设计试验。
由于犁体设计能达到的最大暗管埋深为1.6 m,因此暗管埋深的范围取0~1.6 m。田间实际测得铺管机低速挡最大作业速度为1.3 km/h,因此作业速度的范围为0.5~1.3 km/h。各因素编码、试验设计与结果分别见表3和表4。
方差分析(表5)显示,回归模型显著,失拟不显著,说明模型能够反映实际情况。在回归模型中,仅与2显著,其余项均不显著。

表3 试验因素及水平

表4 试验设计与结果
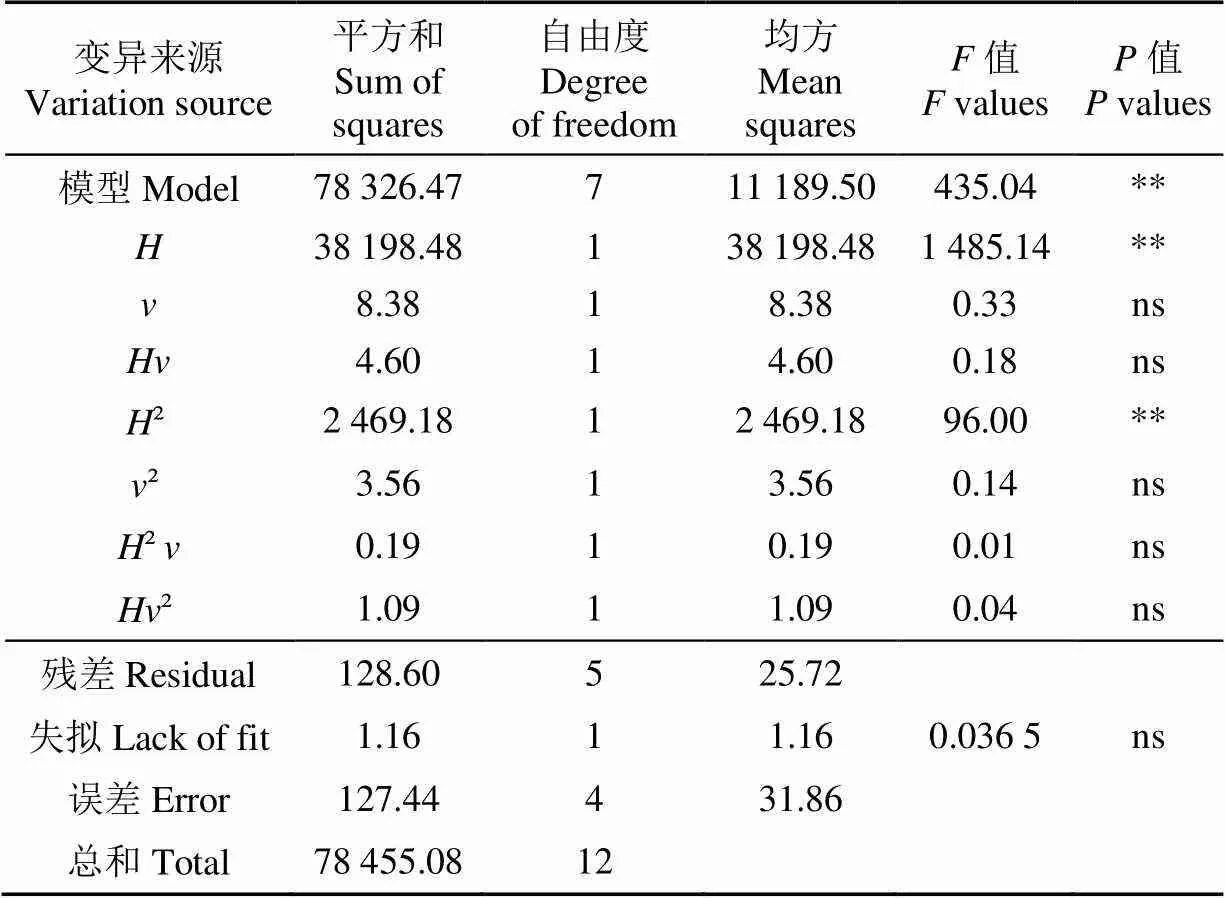
表5 方差分析
注:**表示极显著(<0.001);ns表示不显著(>0.05)。
Note: ** denotes that model terms are highly significant (<0.001); while ns refers to model terms are not significant (>0.05).
剔除不显著项,优化调整后,建立牵引力与各显著性因素间的二次回归模型如式(38)所示。回归模型表明,牵引力为埋深的二次函数,与理论分析一致。
4.4 试验与仿真结果对比分析
依据牵引力需求理论模型(式(32)),式(38)中的试验回归模型中的二次项和一次项来自犁体工作阻力,则有
将式(34)中的犁体工作阻力仿真回归模型与式(39)中的试验回归模型作图比较,如图9所示。
由图9可知,试验回归与仿真回归的绝对误差在埋深小于0.7 m时相对较小,在埋深超过0.7后随埋深增大而增大。在埋深较小时,因犁具工作阻力本身较小,即使较小的绝对误差也会产生较大的相对误差,但是二者的相对误差最大值仍小于20%,可以证明犁体工作阻力仿真结果可信。
5 结 论
1)基于V形犁式无沟铺管机的结构与原理,通过分析犁体工作阻力和履带行驶阻力,建立牵引力需求模型,明确了牵引力需求与暗管埋深的二次函数关系,与已有研究中的经验性判断大致相符。
2)基于现有铺管机设计和山东省庆云县单屯村土壤条件,通过犁体土壤切削动力学仿真,验证了犁具工作阻力理论定性分析的正确性;通过田间试验,验证了牵引力需求模型的正确性,试验回归模型与仿真回归模型相对误差不超过20%,说明理论分析方法与仿真方法可行。
[1] 郭大方,陈坤,胡小安,等. 农田排水暗管系统施工方法和装备研究现状与展望[J]. 农业工程,2020,10(11):58-65.
Guo Dafang, Chen Kun, Hu Xiao’an, et al. Status and prospects for R & D on installation machinery of subsurface land drain-pipes[J]. Agricultural Engineering, 2020, 10(11): 58-65. (in Chinese with English abstract)
[2] De Wilde J G S. Productive capacity of trenching and trenchless machines when laying subsurface drains[J]. Agricultural Water Management, 1992, 21(1/2): 45-56.
[3] Ritzema H P, Nijland H J, Croon F W. Subsurface drainage practices: From manual installation to large-scale implementation[J]. Agricultural Water Management, 2006, 86(1/2): 60-71.
[4] Fouss J L. Drain tube materials and installation[J]. Drainage for Agriculture, 1974, 17: 145-177.
[5] 亨克·尼兰,弗兰克·科隆,亨克·里齐马. 暗管排水工程实践暗管排水系统实施、运行与维护指南[M]. 鞠正山,陈坤译. 北京:北京出版社,2018.
[6] Islam M N, Iqbal M Z, Kabir M S N, et al. Performance evaluation of trenchless subsurface drainage piping machine[J]. Journal of Biosystems Engineering, 2019, 44(4): 218-225.
[7] Machado A L T, Trein C R. Draft prediction models for soil engaging tines in two soils of Rio Grande do Sul, Brazil[J]. Engenharia Agrícola, 2013, 33(1): 167-175.
[8] 曾德超. 机械土壤动力学[M]. 北京:中国科学技术出版社, 1995.
[9] Spoor G, Fry R K. Field performance of trenchless drainage tines and implications for drainage system efficiency[J]. Journal of Agricultural Engineering Research, 1983, 28(4): 319-335.
[10] 郭新荣,谷谒白. 全方位深松部件牵引阻力的分析[J]. 山西师范大学学报:自然科学版,1999(4):31-35.
[11] W. R. 吉尔,G. E. 范德伯奇. 耕作和牵引土壤动力学[M]. 北京:中国农业机械出版社,1983.
[12] Wong J Y. Theory of ground vehicles[M]. Hoboken, New Jersey: John Wiley & Sons, 2008.
[13] 杨士敏,傅香如. 工程机械地面力学与作业理论[M]. 北京:人民交通出版社,2010.
[14] 夏俊芳,贺小伟,余水生,等. 基于ANSYS/LS-DYNA的螺旋刀辊土壤切削有限元模拟[J]. 农业工程学报,2013,29(10):34-41,293.
Xia Junfang, He Xiaowei, Yu Shuishen, et al. Finite element simulation of soil cutting with rotary knife roller based on ANSYS/LS-DYNA software[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(10): 34-41,293. (in Chinese with English abstract)
[15] 卢彩云,何进,李洪文,等. 基于SPH算法的平面刀土壤切削过程模拟[J]. 农业机械学报,2014,45(8):134-139.
Lu Caiyun, He Jin, Li Hongwen, et al. Simulation of soil cutting process by plane blade based on SPH method[J]. transactions of the Chinese society for agricultural machinery, 2014, 45(8): 134-9. (in Chinese with English abstract)
[16] 朱超,朱留宪,黄成. 基于FEM-SPH耦合算法的土壤切削仿真研究[J]. 农机化研究,2015,37(9):54-58.
Zhu Chao, Zhu Liuxian, Huang Cheng, et al. Simulation research of soil cutting based on FEM-SPH method[J]. Journal of Agricultural Mechanization Research, 2015, 37(9): 54-58. (in Chinese with English abstract)
[17] 康建明,李树君,杨学军,等. 圆盘式开沟机作业功耗仿真分析及试验验证[J]. 农业工程学报,2016,32(13):8-15.
Kang Jianming, Li Shujun, Yang Xuejun, et al. Experimental verification and simulation analysis on power consumption of disc type ditcher[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(13): 8-15. (in Chinese with English abstract)
[18] 刘亚超,王秀山,冯敏,等. 基于SPH/FEM耦合算法的土壤切削仿真与研究[J]. 农机化研究,2017,39(7):21-27,33.
Liu Yachao, Wang Xiushan, Feng Min, et al. The soil cutting dynamics simulation and research based on SPH/FEM coupling algorithm[J]. Journal of Agricultural Mechanization Research, 2017, 39(7): 21-27, 33. (in Chinese with English abstract)
[19] Lewis B A. Manual for LS-DYNA soil material model 147[M]. San Francisco: Federal Highway Administration Research and Development Turner-Fairbank Highway Research Center,2004.
[20] Reid J D, Coon B A, Lewis B A, et al. Evaluation of LS-DYNA soil material model 147[R]. San Francisco:Federal Highway Administration,2004,Report No. FHWA-HRT-04-094.
[21] 水利部水利水电规划设计总院,南京水利科学研究院. 土工试验方法标准[M]. 北京:中国计划出版社,2019.
[22] 许贤良. 液压传动. 第2版[M]. 北京:国防工业出版社,2011.
[23] 中国有色工程设计研究总院. 机械设计手册-第5版[M]. 北京:化学工业出版社,2008.
[24] 马彪,万耀青,钱士文. 履带车辆最小滚动阻力系数fmin和行动部分效率ηx分析[J]. 兵工学报(坦克装甲车与发动机分册),1999(1):44-48.
[25] 徐向宏,何明珠. 试验设计与Design-Expert、SPSS应用[M]. 北京:科学出版社,2010.
[26] 袁志发,周静芋. 实验设计与分析[M]. 北京:高等教育出版社,2000.
[27] 任露泉. 试验优化设计与分析第2版[M]. 北京:高等教育出版社,2003.
Tractive force requirement of V-plow drain-pipe installation machine
Guo Dafang1, Chen Kun1,2※, Hu Xiao’an1, Geng Guanjie1,2, Yao Qiang1,2, Yang Lulu1,2, Zhou Kunlei1,2
(1.,100083,; 2...,100083,)
A V-shaped plow has widely been expected to serve as a cost-effective trenchless drain-pipe installation machine in the subsurface drainage over the decades of application in European countries, due to its simple structure, high working efficiency, and low operation cost. The unique characteristics make it particularly suitable for the construction of subsurface drainage systems in alluvial plains along the Yellow River, where the underground water table is shallow, and the soil is unstable. A prototype machine was firstly developed in China at the beginning of the 13th Five-Year Plan period in 2016. In this study, a systematic investigation has been conducted on the tractive force requirement at different depthes in the pipe installation, thereby verifying the performance of the machine. A dynamic analysis was made to clarify the working resistances (consisting of soil-cutting, soil-lifting, and soil-metal friction resistance), and the traveling resistance (consisting of soil compaction, bulldozing, and friction resistance) using the mechanical structure and working principle. Two major components also constituted the total requirement of tractive force. A mathematical model was then established to describe the relationship of tractive force requirement with the plow body specifications, soil physical properties, and drain-pipe depth. The model indicated that the tractive force requirement was the second power in the pipe installation depth, particularly with the primary and quadratic terms resulted from the plow working resistance and the constant term from the track traveling resistance. A prototype machine was used to collect the soil physical data from the Shantun Village, some 80 km to the lower reaches of Huanghe River in Shandong Province of China. A Finite Element Method (FEM) and Smooth Particle Hydrodynamics (SPH) were combined for the dynamic simulations at different installation depths. The results showed that the curve of working resistance was in good conformance to the general law of plow-body and soil interaction. Specifically, the plow working resistances were 35.65, 55.71, 111.06, 201.80, and 313.22 kN, respectively, at the installation depth of 0.4, 0.6, 0.8, 1.2, and 1.6 m. A regression analysis was also implemented to further verify the validity of the model. A field test was planned using a central composite design, where the installation depth of drain-pipe and working speed of machine were set as the factors, whereas the tractive force was as the response. The power consumption of hydraulic pump was measured to determine the requirement of tractive force for the driving and traveling speed of the machine. An entire ANOVA table showed that there was a significant effect of installation depth and square in a drain pipe on the tractive force requirement, as indicated in the theoretical model. The tested and simulated regression curves of working resistance fit quite well, with the maximum relative error smaller than 20%, indicating the acceptable simulated data. The data can be expected to serve as a basic guideline for the V-plow drain-pipe installation machine under various soil physical properties at varying drain-pipe installation depth and pipe diameter to be installed. The finding can further provide strong support to the structural design of a V-plow machine for the trenchless drain-pipe installation.
agricultural machinery; simulation; test; trenchless drain-pipe installation machines; traction requirement
10.11975/j.issn.1002-6819.2021.10.006
S222.5
A
1002-6819(2021)-10-0046-08
郭大方,陈坤,胡小安,等. V形犁式无沟铺管机牵引力需求[J]. 农业工程学报,2021,37(10):46-53.doi:10.11975/j.issn.1002-6819.2021.10.006 http://www.tcsae.org
Guo Dafang, Chen Kun, Hu Xiaoan, et al. Tractive force requirement of V-plow drain-pipe installation machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(10): 46-53. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.10.006 http://www.tcsae.org
2021-01-25
2021-04-27
国家重点研发计划项目(2016YFC0501305)
郭大方,研究方向为土地整治技术与装备、土壤机械系统动力学。Email:guodafang@foxmail.com
陈坤,研究员,硕士生导师,研究方向为土地整治技术与装备。Email:chenkun@caams.org.cn
猜你喜欢
昆明医科大学学报(2021年12期)2021-12-30
红领巾·探索(2021年2期)2021-08-26
英语文摘(2020年10期)2020-11-26
学生天地(2020年34期)2020-06-09
作文周刊·小学一年级版(2020年8期)2020-05-11
军事文摘·科学少年(2020年2期)2020-03-19
当代陕西(2019年11期)2019-06-24
科技创新与应用(2017年26期)2017-09-12
科技创新与应用(2017年1期)2017-05-11
中学生数理化·高一版(2016年4期)2016-11-19