滴灌轮灌分组优化模型与算法
2021-09-02 13:04陈伟能邓红涛陈红莉
农业工程学报 2021年10期
李 伟,陈伟能,田 敏,邓红涛,陈红莉
·农业水土工程·
滴灌轮灌分组优化模型与算法
李 伟1,2,陈伟能1,田 敏3,邓红涛3,陈红莉4
(1. 华南理工大学计算机科学与工程学院,广州 510000;2. 石河子大学信息科学与技术学院,石河子 832000;3. 石河子大学机械电气工程学院,石河子 832000;4. 新疆天业集团有限公司,石河子 832000)
传统的轮灌组划分计算方式效率较低且难以获得较好方案。该研究首次采用智能算法来求解轮灌组划分问题,依据《微灌工程技术标准》及轮灌组划分原则,提出了基于流量均衡的数学模型及其约束条件。通过分析支管空间分布,确定了滴灌问题的邻域特征,在半径阈值范围内给出了最大限度查找关键路径的邻域搜索策略和不可行解修复算法,并采用传统遗传算法(Genetic Algorithm,GA)、贪心遗传算法(Greedy-GA)、泰森多边形遗传算法(Voronoi-GA)和网格遗传算法(Grid-GA)算法分别求解模型,探索适应轮灌分组问题的初始化方法。对标准差、组内路程、连通性和运行时间4项指标对比分析,结果表明:Grid-GA算法表现优异,采用的邻域策略可有效避免支管分布过于分散,有利于日常管理与维护。取半径阈值280 m条件下,算法在300代左右达到收敛,最小标准差10.9 m3/h,组内路程8 105.2 m,连通性指标25,与一种冒泡+贪心的近似算法相比最小标准差小59.1%。该研究对提高滴灌工程设计效率和促进轮灌工作制度有效运行有着重要研究意义。
模型;算法;网格法;滴灌;轮灌组;遗传算法;智能优化算法
0 引 言
滴灌系统利用专门的灌溉设备以间断或连续的水滴或细流将水灌到部分土壤表面和作物根区,这种方式节水、节肥、增产,在干旱和半干旱地区被广泛采用。由于劳动力成本等因素,国外的滴灌技术研究偏向自动化控制以及降低运营成本。如采用无线传感器网络(Wireless Sensor Networks,WSNs)或物联网(Internet of Things,IoT)等技术将传感器、气象站和控制中心等互连来实现自动灌溉[1-2]。Roopaei等[3]提出将IoT和信息物理系统(Cyber-Physical Systems,CPS)相结合来解决灌溉问题。Moreno等[4]通过研究灌溉计划与能源消耗的关系表明采用合适的灌溉方案可以减少能源消耗3.5%~24.9%。中国新疆从1996年开始从以色列引进滴灌技术,为了解决滴灌在大田作物低成本应用的问题,新疆结合自身特点建立了一整套膜下滴灌技术[5]。截止2019年,全疆应用滴灌规模已超过300万hm2,占全国比重为60%左右。国内学者从不同的角度对滴灌问题进行了研究,信息技术角度研究包括灌水器堵塞机理与优化[6-7]、管网布置优化[8]、精准滴灌系统[9]、滴灌智能控制[10]等;农业角度研究包括精准施肥[11]、水肥一体化[12-13]等。但国内外学者对轮灌分组问题却鲜有研究,仅有国内学者从使用角度提出了轮灌组划分存在的问题[14-15],但没有提出模型和算法。
轮灌是为了降低工程成本所采用的一种灌溉方式。这种方式水量相对集中,管理简便,适用于集中连片的规模化经营土地,是新疆滴灌工程主要应用模式[16]。轮灌组是轮灌灌溉制度的核心,其划分受作物种类、生长阶段、水资源、电力供应等因素影响。设计人员依据《微灌工程技术标准》(GB/T50485-2020,以下简称“标准”)计算时,大多基于人工经验和EXCEL推算。随着工程规模越来越大,传统设计方法不仅效率低,且很难得到合理的方案。当外部因素变化时又无法及时调整,导致轮灌工作制度无法有效运行[14,17],影响了滴灌设施的用水效率[18]。
在渠系研究中也存在类似轮灌分组问题[19-21],这类问题多就渠系用水总量和作物生长关系开展研究[22]。如程帅等[23]选择总配水与轮灌组之间引水持续时间差异值最小构建渠系优化配水模型。高伟增等[24]以渠道的输水渗漏损失最小作为目标优化轮灌组。这些研究表明轮灌分组问题是一个高维离散组合优化问题[25-26],智能算法在渠系轮灌分组问题上取得了较好效果,这些模型和算法虽然具有一定理论参考意义。但渠系轮灌组与滴灌轮灌组在空间分布、水力特性、灌溉模式、计算标准上都有本质区别,渠系模型和算法并不能直接应用在滴灌轮灌分组问题中。
综上所述,滴灌轮灌分组是一个新兴问题,具有明显的地域特色和水力特征,可以在渠系研究的基础上,开展轮灌组的模型和算法研究。针对传统轮灌组划分手工效率低的问题,本文首次引入智能算法求解轮灌组划分问题,以流量标准差最小为优化目标,采用混合遗传算法优化模型,并探索算法最有利的初始化方法和搜索策略。该研究旨在探索智能算法在轮灌组优化问题上的可行性,为今后相关研究提供借鉴和参考,以期提高滴灌工程设计效率和保障轮灌工作制度有效运行。
1 轮灌分组模型建模
1.1 工程背景分析
本研究以新疆团场滴灌工程为研究案例,该工程地块总面积约70 hm2,滴灌带按照一管二行布置,滴头流量1.8 m3/h,工作压力0.1 MPa,轮灌组由若干支管组成,如图1,假设1-1,1-2,1-3,2-1,2-2为一个轮灌组,其中,“-”前数字代表分干管,“-”后数字代表支管,整体构成一个轮灌组。每个轮灌组运行时,其内部支管上所有毛管全部开启,一个轮灌组灌水完成后,开启下一个轮灌组内的支管及毛管,然后再关闭前一个轮灌组内的支管。农户按照轮灌组支管顺序逐步完成整个地块灌溉,相比自动化滴灌,这种手工控制支管的轮灌模式劳动强度大,但是投资成本低,维护简单,普及面积广。为节约成本及管理方便,轮灌组划分需要满足《标准》中管网水力计算和流量均衡需求,避免因压力不均衡导致管网水头损失或破损。此外还须遵循的原则包括:1)轮灌组中各支管阀门要相对集中,有利于减轻农户劳动强度;2)组内支管要按顺序编组,便于农户管理与维护。
轮灌分组问题可以简单描述为:将个支管分配到个轮灌组,在满足约束条件下,寻找组内合理的空间分布,从而优化1个或多个性能指标。因此,可以将轮灌分组转化为求解矩阵X的问题,即个支管在个轮灌组中的开闭状态,分别由0和1表示。如式(1)矩阵中列表示支管编号={1,2,…,},且每列只能开启1次。行表示轮灌组编号={1,2,…,},且每行中应至少有1个支管处于开启状态。根据划分原则,轮灌分组问题的实质就是求解行间流量标准差最小,同时满足行内支管空间分布邻近且按顺序编号的矩阵X。
1.2 轮灌分组模型构建
首先根据水源、土壤、作物等基础数据及灌溉保证率、灌溉水利用系数、土壤湿润比、湿润层深等参数,分别计算灌水定额、灌水周期和单次灌水延续时间。式(1)~式(6)、式(15)~式(17)由《标准》规定。
m=0.1(max-min)/(2)
( m /I)(3)
=mSS/q(4)
式中m为设计灌水定额,mm;为土壤容重,g/cm3;为计划湿润层深度,m;为微灌设计土壤湿润比,%;max、min为适宜土壤含水量上下限,占干土质量的百分比,%;为灌水周期,d;I为设计耗水强度,mm/d;为灌溉水利用系数;为单次灌水延续时间,h;q为灌水器流量,m3/h;S为灌水器间距,m;S为毛管间距,m。
根据管网及水力系统压力等要求,确定实际轮灌组数N
max=INT[/] (5)
N=n总q/且满足N≤max(6)
式中max为最大轮灌组数;N为实际轮灌组数;为系统日工作时间,一般取18~22 h;为可供流量,m3/h;总为系统滴头总数。
根据流量均衡要求,建立以各轮灌组流量标准差最小为目标的数学模型
式中()表示轮灌组流量标准差,m3/h;Q为第个支管设计流量,m3/h;F为第轮灌组流量和,m3/h;α表示各轮灌组流量平均值,m3/h。
约束条件:
1)0-1约束
V= 0,1 (10)
式中V表示支管在第轮灌组中状态,由于支管阀门只有开和关两种状态,V=0和1分别表示支管阀门关和开。
2)流量约束
式中max为轮灌组最大设计流量,m3/h,即任意轮灌组流量应小于最大设计流量,大于设计流量80%:
3)流量差约束
Δ= max(F)-min(F)<(12)
式中F表示各轮灌组流量集合,m3/h;Δ为任意两个轮灌组流量之差,m3/h;为流量差阈值,m3/h。
4)压力差约束
Δmax()- min() <(13)
毛=1.2fLFQm2毛/D(15)
支=1.1fLFQm2支/D(16)
干=1.1fLFQm2干/D(17)
式中表示各轮灌组压力集合,Δ表示任意轮灌组压力之差应小于一定阈值。毛、支、干分别代表毛管、支管和分干管扬程,m;为沿程水头损失系数;毛、支、干分别代表毛管、支管和分干管管道流量,m3/h;为管长,m;F为多口系数;为管道内径,mm;2为流量指数;为管径指数,因管材及局部损失等压力计算结果相似,不计算在公式(14)内。
2 基于邻域搜索策略的混合遗传算法
2.1 算法流程
将不同特点的算法混合使用,可以避免使用单一方法早熟和陷入局部最优[27]。随机方式初始化难以保证初始种群的质量,容易产生不可行解。因此,分别采用传统遗传算法(Genetic Algorithm,GA)、贪心遗传算法(Greedy-GA)、泰森多边形遗传算法(Voronoi-GA)[28]和网格遗传算法(Grid-GA)求解模型,并探索最优初始化方法。由于遗传算法是一种元启发式算法,其核心是随机概率,理论上遗传算法求解的结果是不确定的,不能保证全局最优,因此,本文采用贪心策略在遗传算法求解结果的基础上进行二次优化,一方面可以从全局角度二次调优,另一方面也可以通过参数调整,在满足流量标准差不变的条件下优化其他指标,算法流程如图2所示。
2.2 模型求解
遗传算法求解涉及染色体编码、初始化种群、目标函数计算、子代种群生成等。
1)染色体编码:采用实数编码的支管编码方式,假设有个支管,从1到顺序编号,每个支管代表1个遗传编码位,每个编码位中的数字表示1个轮灌组编号,则染色体编码表征为支管在第几轮灌组开启。如图3数字“9”表示编号为4的支管在第9轮灌组中开启。
2)种群初始化:分别采用随机法、贪心算法(Greedy)、泰森多边形(Voronoi)和网格法(Grid)构造初始种群。其中前3种都是在全局解空间中随机生成若干随机点,不同点在于贪心算法以随机点为基准,其策略为通过距离邻近策略遍历支管来构建初始种群,直至遍历完所有支管为止。泰森多边形法通过随机点先分割为泰森多边形,再将多边形区域内支管组成初始种群。网格法则是将解空间均分为若干区域,在区域内生成随机点,再以邻近策略遍历随机点附近支管来构建初始种群。
3)邻域搜索策略:邻域结构体现着问题本身特征信息的利用。对轮灌分组问题而言,支管空间分布具有重要的结构特征。如图1,1-1和1-2具有连通性,是一条关键路径。而2-4和3-5则不是。搜索策略关键步骤为:
①根据轮灌组数,支管数,建立支管邻接矩阵[,]。使用Warshall算法[29]生成支管可达矩阵[,],计算每个支管的关键路径集{1,2,…,A-1,A}。
②将编码转换为矩阵X形式,基于可达矩阵[,]生成各支管关键矩阵和非关键矩阵*。
③计算临时路径。在半径阈值范围内,计算任意支管O可选路径集为TÍ{1,2,…,A-1,A},再分别计算T在第轮灌组的集合,累加并减去得到临时路径集合Temp,并依据可达性排序。
④计算比较集合。依据标准差指标,依次将非关键矩阵*各轮灌组中支管分别与TempM比较。
⑤更新矩阵。选择可行解,交换并更新关键矩阵[,],并与剩余*合并。
4)子代种群的生成:包括交叉、变异和选择机制。选择机制采用竞标赛和精英保留策略,有利于加快种群整体收敛速度。为增加搜索空间范围,交叉、变异均采用均匀交叉策略,即从编码第一位开始以一定概率交叉或变异,直至编码最后1位。交叉和变异过程产生的不可行解均通过修复算法修复。根据编码规则,不可行解主要包括两种情况,一种是子代生成导致轮灌组为空,即某一轮灌组中没有支管开启;另一种是子代生成中支管分布过于分散,从而影响算法性能。针对这两种情况,修复算法的核心思想是将变异交叉控制在半径阈值范围内,首先避免支管分布过于分散,其次通过邻近搜索的方法,采用轮盘赌策略来选择轮灌组内支管较少的组作为修复解,以此避免轮灌组为空的问题。修复算法关键步骤为:
①对子代种群生成的编码位进行验证,判断其是否为不可行解,判断依据是编码位半径阈值范围内是否有相同轮灌组编号,如果没有则表示需要修复。
②计算当前编码位邻近支管集合,并存入集合MatrixPool={1,2, …,LN },LN为支管编号,邻近范围由半径阈值参数设置。
③计算数组MatrixPool中支管所在轮灌组编号,并将编号顺序存入集合Group={1,2, …,LM },LM为轮灌组数量。
④计算数组Group中每个轮灌组包含的支管数量,得到集合numberGroup={1,2,…,LS },LS为支管数量。
⑤计算集合numberGroup中每个元素的倒数并归一化,采用轮盘赌策略选择数组中的元素,数量越少的数组元素有较大的几率被选择为修复解。如果轮盘赌策略选择的编码存在轮灌组为空的情况,则直接将最小的数组元素作为当前编码位的修复解。
2.3 二次优化
基于可达矩阵[,]设计连通性指标,计算公式为
式中为连通度,通过各轮灌组内支管连通可达数量的累计和计算得到。连通度越大表示组内支管互连度越高,越趋于集中,连通度越小则表示组内支管越趋于分散。在上述遗传算法求解结果基础上,采用贪心算法进行二次调优,贪心策略为采用邻近策略搜索半径阈值范围内支管,以流量标准差为基准优化连通度指标,替换并更新遗传算法求解的结果。
3 结果与分析
3.1 参数计算与设置
根据案例数据计算工程参数及支管数据,见表1和表2。以工程左下角第1个支管为原始起点坐标,则表2中支管1-1坐标为(0,0)。由于案例滴灌带采用一管二行布置,设同一分干管上的相邻支管间距为1 m,则支管1-2坐标为(1,0),其余支管坐标按照距离依次计算得出。由于支管数量多且编码维数较高,经验证,设种群数p=200,迭代次数Iter=500,交叉概率0.09,变异概率0.01,半径阈值280 m。
3.2 算法分析
采用标准差、组内路程、连通性和运行时间4项指标对比分析。其中,标准差由公式(7)定义,组内路程指轮灌组内支管距离和,由于支管是按编号从小到大排列的,这里组内路程不是最优路径,是按照支管排列序列的距离和。连通性按照公式(18)定义方法计算。运行时间指算法求解模型一次所花费时间。将基本参数分别输入GA、Greedy-GA、Voronoi-GA和Grid-GA算法,每个算法运行50次。

表1 滴灌工程设计参数
表3显示,初始种群的质量对算法的求解质量具有重要的影响。与传统GA相比,Greedy-GA、Voronoi-GA和Grid-GA混合算法平均标准差均小于20 m3/h,满足流量均衡。其中,Grid-GA最小标准差为10.9 m3/h,分别比GA、Greedy-GA和Voronoi-GA小71.6%、13.1%和31.1%,均值标准差为16.3 m3/h,分别比其他算法少68.8%、6.3%和12.3%,最优与最差摆动幅度最小。组内路程均值为8 105.2 m,分别少于其他算法23.9%、4.1%和12.2%。连通性均值为25,分别比其他算法高177.7%、13.6%和56.2%。Greedy-GA与Grid-GA结果最接近,Voronoi-GA在混合算法中表现最差,主要原因是当随机点分布均匀时,Greed与Grid初始解分配存在一定相似性,而当随机点不均匀时,Greed方法种群竞争激烈导致支管分布过于离散,影响求解质量。Voronoi是一种图像分割算法,其与分割区域大小有关,缺乏支管间逻辑关系,初始解的随机性影响了空间区域稳定性,存在大量不可行解,导致算法迭代和求解质量。GA算法不需要大量计算邻近矩阵,所以运行时间最短,而其他3种混合算法搜索策略相似,运行时间接近。综合显示:Grid-GA算法表现优异,说明种群初始化分布均匀有利于轮灌分组问题寻优,而初始解构造的随机性可能导致支管分布过于集中或离散,加剧了种群资源竞争,不利于结果寻优。
图4中3种混合算法均采用了修复算法,收敛下降趋势类似,没有出现剧烈波动,稳定性好。在300代左右均向最优解收敛。Grid-GA收敛曲线的起点优于其他随机分布算法,收敛速度更快。Greedy-GA和Voronoi-GA初始点具有较大偶然性,其中,Greedy-GA初始随机点过于集中或离散会导致各种群竞争过于激烈,制约搜索空间展开,影响初始解质量。Voronoi-GA图像分割会产生不可行解,初始种群具有不确定性,影响了迭代过程搜索效率。GA全局随机方式会生成大量不可行解,收敛慢,难以找到最优解。

表2 支管基础数据
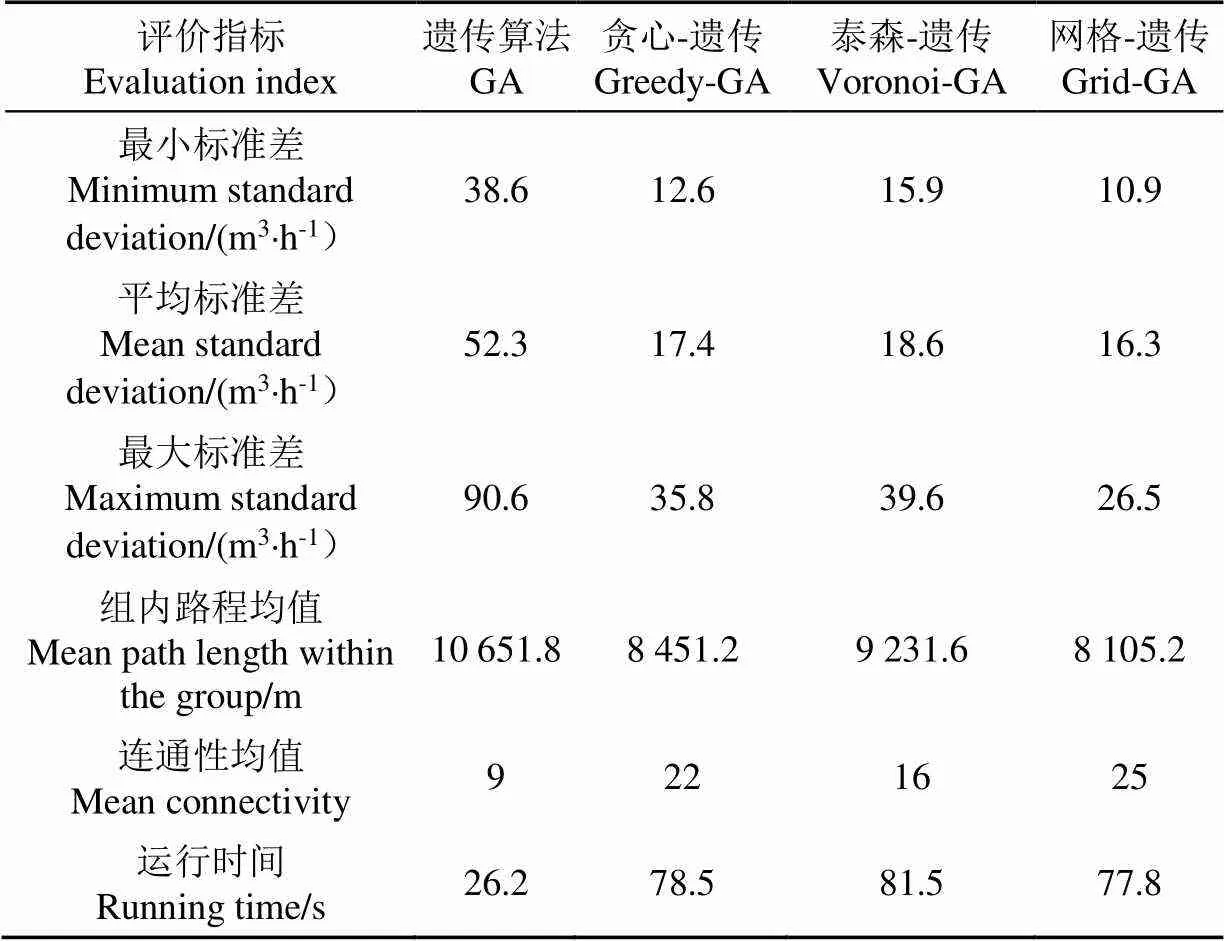
表3 不同轮灌分组算法比较
半径阈值一定程度上代表算法搜索空间,是邻域搜索和修复算法重要参数。如图5所示,半径阈值在100~300 m区间时,随着阈值变大增加了搜索空间,标准差呈快速下降趋势。从半径阈值450 m左右,标准差反而有一定程度上浮,原因是搜索空间变大增加了不可行解数量,选择、交叉的搜索寻优功能减弱,影响了求解结果。图6中,半径阈值与连通性指标总体呈下降趋势,3种混合算法总体偏差为19%~35%之间,偏差幅度大。表明在标准差约束下,空间搜索范围增大会降低组内支管连通性,即组内支管空间分布反而变得分散。图7为半径阈值与组内路程关系,路程总体偏差为19%~38%之间,幅度较大。表明搜索范围对组内空间分布影响较大,组内支管越分散,路程越长。Grid-GA与Greedy-GA均通过邻近策略构建支管逻辑关系,组内路程相对接近,而Voronoi-GA空间分割有较大随机性导致路程变化幅度大。
半径阈值参数的设定可以避免轮灌组内支点过于分散,有利于农民日常管理与维护,从图5、图6和图 7可以看出,半径阈值参数与算法性能密切相关,其中半径阈值与标准差和连通性总体表现为负相关,与路程呈正相关。因此,半径阈值可以作为算法性能和用户需求的关键指标,也是滴灌工程经济性和便利性的关键参数。
3.3 轮灌组优化结果
本案例手工计算标准差为17.4 m3/h,虽然满足标准中的流量约束,但是花费时间较长。表4为采用Grid-GA算法求解模型的结果,标准差10.9 m3/h,轮灌组流量均值260.06 m3/h,总路程7 342.6 m,平均路程386.4 m,连通性为22。与其他算法相比,Grid-GA表现稳定,满足约束和工程需求,避免了多维问题的维数灾问题,对求解轮灌组优化问题有很高的性能。
轮灌分组问题是一个组合优化问题,其目的是寻找离散数据的最优分组、编排和次序等。求解这类问题常用算法包括元启发式算法和近似算法,其中近似算法的本质通常是贪心算法。因此,针对轮灌组问题特征,设计一种基于冒泡+贪心策略的近似算法,并与Grid-GA进行对比。冒泡+贪心算法步骤:首先采用冒泡法将支管流量从大到小排序,贪心策略为从流量最大的支管开始分配到不同的轮灌组中,然后分别计算待分配的支管分配到某轮灌组中时的流量标准差,以轮灌组标准差最小为最佳划分方案,直至遍历计算完所有支管为止。
由表5对比分析可以看出,冒泡+贪心算法最小标准差为26.8 m3/h。Grid-GA最小标准差为10.9 m3/h,Grid-GA比冒泡+贪心算法最小标准差少59.1%,组内路程均值小29.9%,连通度则高257.1%,主要原因是轮灌分组问题的组合变量是离散分布的,传统优化方法求解这类问题会带来所谓的“组合爆炸”。另外,冒泡+贪心算法是基于流量大小来选择支管,从空间上表现出支管分布过于分散,导致组内路程和连通性指标较差,难以获得最优解。冒泡+贪心算法计算较为简单,运行时间只需要8.3 s,但是计算结果无法直接使用,需要再次对求解结果进行手工调优,调优过程需要依据工程人员设计经验,可能需要更多的时间。
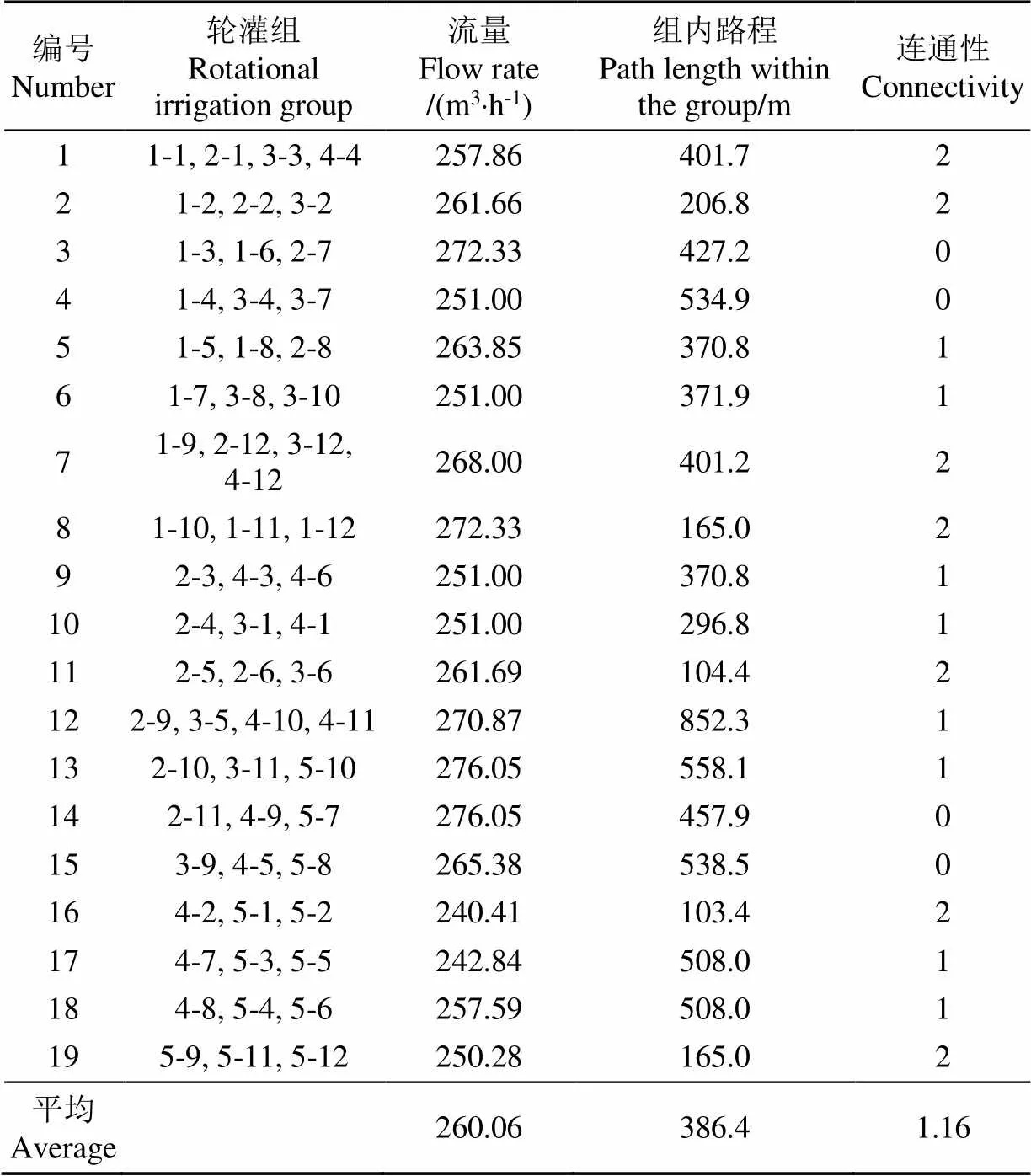
表4 基于网格-遗传混合算法的最优轮灌组求解结果

表5 Grid-GA与冒泡+贪心算法比较
为了验证算法对轮灌分组问题的普适性,选取新疆生产建设兵团第三师45团的3组工程案例进行验证,3组案例支管规模分别为70、50和40个,根据案例工程区域大小分别设置半径阈值为300、250和220 m,其他参数如种群数迭代次数、交叉概率和变异概率与前述算法设置相同。
从表6中可以看出,3组案例在工程面积、支管规模及轮灌组数均有区别,案例1、案例2与案例3的工程面积依次从大到小,案例1与案例3轮灌组数相差1倍,3组案例可以代表不同的滴灌工程应用场景,具有一定普适性。试验结果中3组案例求解时间均小于80 s,可极大提升工程设计计算效率,求解的最小标准差分别为13.3、12.1和6.9 m3/h,均满足流量约束条件,符合工程实际需求,验证了算法的有效性。研究初步表明支管数与运行时间指标呈正相关,而标准差、组内路程和连通性指标与各自案例特征有关,与支管数、轮灌组数和面积等并无直接关联,这也表明不同案例的轮灌分组有一定的特殊性。由于验证过程中采用相同的优化参数,在实际优化中还需要根据案例情况对参数进行适当调整,包括半径阈值、种群数和迭代次数等。
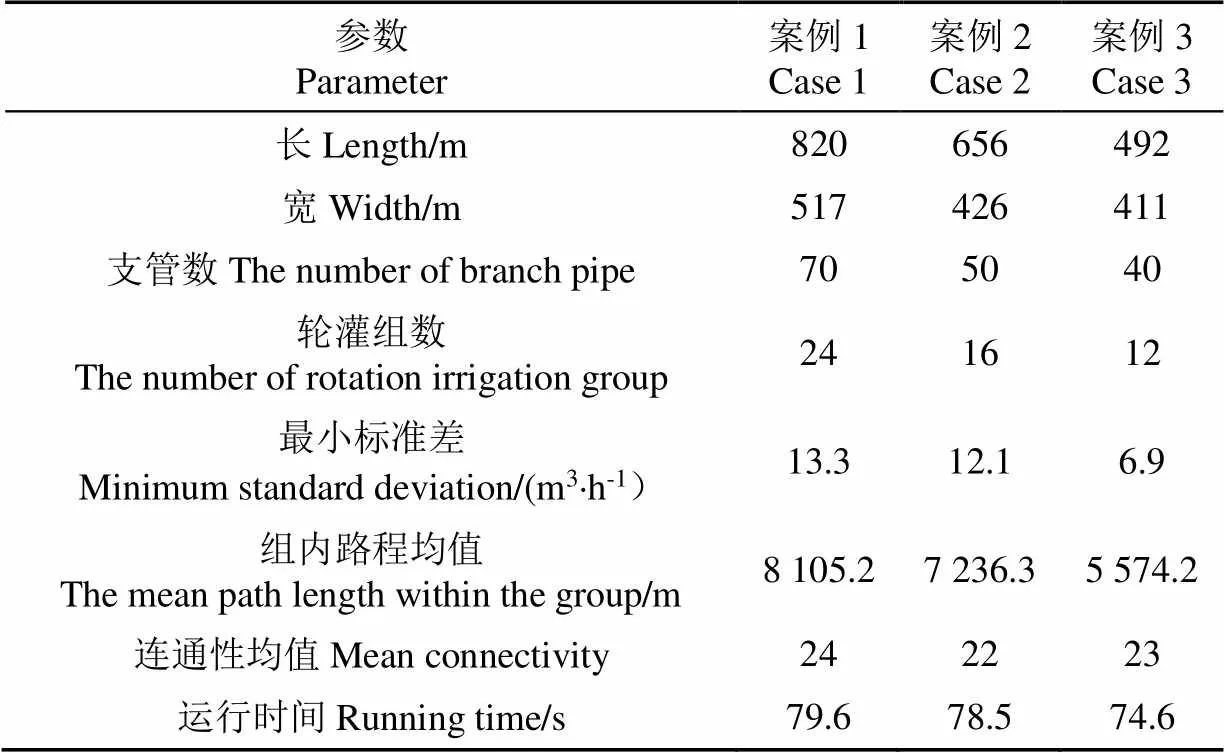
表6 3组案例的算法普适性验证
4 讨 论
1)传统轮灌分组主要采用EXCEL推算的方式来划分,其结果优劣取决于工程规模和设计人员经验,也缺乏公开的算法和数据集。随着大规模滴灌工程的普及,传统手工方式难以适应工程计算的需求,切实需要改进现有的计算方法。而人工智能算法被广泛用来解决一些工程实际问题,具有广泛的适用性和应用价值,本文的Grid-GA就是智能算法中的一种元启发式算法。
2)需要说明的是:本文分别在种群初始化(第2.2节)、二次优化(第2.3节)和近似算法(第4节)中采用了贪心算法。贪心算法(又称贪婪算法)是一种对某些求最优解问题的简单但迅速的优化技术,并没有固定的算法框架,算法设计的关键是贪心策略的选择,需要根据先验知识来决定算法流程和步骤。因此,文中虽然3次提及贪心算法,但是其算法和步骤均有所差别。
3)表3与图5研究表明初始种群分布特征以及半径阈值大小对算法性能有较大影响,可以继续从种群初始化策略以及研究自适应阈值的角度来提高算法性能。同时,虽然支管流量有其固定的水力计算方法,但是可以针对支管流量进行敏感度分析,研究支管流量对算法的影响程度,以便为今后算法改进提供决策支持。另外,虽然遗传算法具有较好的全局搜索能力,但是局部搜索能力较弱,而半径阈值参数更限制了遗传算法的全局搜索能力,为此,可以重点研究将爬山法、模拟退火、变邻域等局部搜索方法与遗传算法结合,充分发挥两者在全局搜索和局部搜索的优势来共同求解轮灌组,这也是算法下一步需要重点研究和探索的方向。
5 结 论
本文首次将智能算法运用到滴灌轮灌组划分问题,从流量均衡和划分原则出发,建立了流量标准差最小为目标的优化模型和约束。分别采用遗传算法(Genetic Algorithm,GA)、贪心-遗传算法(Greedy-GA)、泰森-遗传算法(Voronoi-GA)和网格-遗传算法(Grid-GA)求解模型。其中Grid-GA相比其他算法表现优异,在最小标准差、标准差均值和组内路程均值指标上分别比其他算法小13.1%~71.6%、6.3%~68.8%和4.1%~23.9%,连通性均值比其他算法高13.6%~177.7%,表明初始化种群分布均匀,有利于求解轮灌组问题。混合算法中邻域搜索策略可以提高算法收敛速度,修复算法则有利于避免支管分布过于离散,便于农户日常管理与维护。Grid-GA与冒泡+贪心的近似算法比较中最小标准差小59.1%,也验证了元启发算法在轮灌组划分问题上的潜力。最后分别在3组不同支管规模的案例上进行测试,验证了模型和算法的有效性,表明该研究具有较好的研究和应用价值。
[1] Roy S K, Roy A, Misra S, et al. AID: A prototype for agricultural intrusion detection using wireless sensor network[C]//2015 IEEE International Conference on Communications (ICC). Piscataway: IEEE, 2015.
[2] Kumar A, Surendra A, Mohan H, et al. Internet of things based smart irrigation using regression algorithm[C]//2017 International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT). Amsterdam: Elsevier, 2017.
[3] Roopaei M, Rad P, Choo K. Cloud of things in smart agriculture: Intelligent irrigation monitoring by thermal imaging[J]. IEEE Cloud Computing, 2017, 4(1): 10-15.
[4] 马富裕,周治国,郑重,等. 新疆棉花膜下滴灌技术的发展与完善[J]. 干旱地区农业研究,2004,22(3):202-208.
Ma Fuyu, Zhou Zhiguo, Zheng Zhong, et al. The development and improvement of drip irrigation under plastic film on cotton[J]. Agricultural Research in the Arid Areas, 2004, 22(3): 202-208. (in Chinese with English abstract)
[5] Jiménez-Bello M A, Campos J C A, Manzano-Juárez J, et al. Methodology for flushing pressurised irrigation networks for fertigation and operation maintenance purposes[J]. Irrigation Science, 2021, 39(3): 375-384.
[6] Moreno M A, Córcoles J I, Tarjuelo J M, et al. Energy efficiency of pressurised irrigation networks managed on-demand and under a rotation schedule[J]. Biosystems Engineering, 2010, 107(4): 349-363.
[7] Zhang Z, Li L, Yang P, et al. Effects of water salinity on emitter clogging in surface drip irrigation systems[J]. Irrigation Science, 2021, 39(2): 209-222.
[8] 王新端,白丹,郭霖,等. 改进的滴灌双向流道结构参数对水力性能影响[J]. 排灌机械工程学报,2016,34(12):1093-1098.
Wang Xinduan, Bai Dan, Guo Lin, et al. Influence of structural parameters of improved bidirectional flow channel on hydraulic performance in drip irrigation[J], Journal of Drainage and Irrigation Machinery Engineering, 2016, 34(12): 1093-1098. (in Chinese with English abstract)
[9] 田敏. 基于物联网技术的作物养分信息快速获取与精准施肥智能控制系统研究[D]. 石河子:石河子大学,2018.
Tian Min. Research on Crop Nutrient Information Acquisition and Precision Fertilization Intelligent Control System Based on Internet of Things[D]. Shihezi: Shihezi University, 2018. (in Chinese with English abstract)
[10] Shi J C, Wu X, Zhang M, et al. Numerically scheduling plant water deficit index-based smart irrigation to optimize crop yield and water use efficiency[J]. Agricultural Water Management, 2021, 248: 106774.
[11] 王建阳. 河套灌区不同灌溉与覆膜方式下土壤水盐离子动态变化研究[D]. 呼和浩特:内蒙古农业大学,2019.
Wang Jian Yang. Study on Dynamic Changes of Soil Water and Salt Ions under Different Irrigation and Film Mulching Methods in Hetao Irrigation Area[D]. Hohhot: Inner Mongolia Agricultural University, 2019. (in Chinese with English abstract)
[12] Liu R, Yang Y, Wang Y S, et al. Alternate partial root-zone drip irrigation with nitrogen fertigation promoted tomato growth, water and fertilizer-nitrogen use efficiency[J]. Agricultural Water Management, 2020, 233: 106049.
[13] 顾巍,叶志伟,严盟,等. 一种多目标水肥一体化系统轮灌组划分方法:中国专利,109496520A[P]. 2019-03-22.
[14] 马章进. 新疆大田滴灌工程运行中存在的问题及解决建议[J]. 水利技术监督,2018, 26(5):79-80.
Ma Zhangjin. Problems and suggestions in operation of drip irrigation project in xinjiang field[J]. Techenical Supervision in Water Resources, 2018, 26(5): 79-80. (in Chinese with English abstract)
[15] 杨光龙,洪亮. 支管轮灌滴灌模式在大田应用中的优点浅述[J]. 农业科技与信息,2008, 25(10):42.
Yang Guanglong, Hong Liang. The advantages of branch-wheel drip irrigation in field application are briefly discussed[J]. Agricultural Science and Technology and Information, 2008,25(10): 42. (in Chinese with English abstract)
[16] 李萌. 南疆膜下滴灌棉花灌溉和施肥调控效应及生长模拟研究[D]. 杨凌:西北农林科技大学,2020.
Li Meng. Study on Effect of Irrigation and Fertilization Regulation and Simulation of Cotton Growth under Film-Mulched Drip Irrigation in Southern Xinjiang[D]. Yangling: Northwest A&F University, 2020. (in Chinese with English abstract)
[17] 程毅强. 关于优化滴灌轮灌运行方式的探讨[J]. 中国水运(下半月),2013,13(9):232-233.
[18] Blanke A, Rozelle S, Lohmar B, et al. Water saving technology and saving water in China[J]. Agricultural water management, 2007, 87(2): 139-150.
[19] Masseroni D, Castagna A, Gandolfi C. Evaluating the performances of a flexible mechanism of water diversion: Application on a northern italy gravity-driven irrigation channel[J]. Irrigation Science, 2021, 39(3): 363-373.
[20] Pallavan P N I, Abhirame V S, Prabha V S. Characterization of Water Dynamics and Modelling of an Open Channel Irrigation System[C]//IOP Conference Series: Materials Science and Engineering. London: IOP Publishing, 2020.
[21] Ficchì A, Raso L, Dorchies D, et al. Optimal operation of the multireservoir system in the Seine river basin using deterministic and ensemble forecasts[J]. Journal of Water Resources Planning and Management, 2016, 142(1): 05015005.
[22] 马孝义,于国丰,李安强,等. 渠系配水优化编组通用化软件的研发与应用[J]. 农业工程学报,2005,21(1):119-123.
Ma Xiaoyi, Yu Guofeng, Li Anqiang, et al. Development and application of universal software for optimal water distribution of canal system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2005,21(1): 119-123. (in Chinese with English abstract)
[23] 程帅. 基于智能算法与GIS的灌溉水资源多目标优化配置[D]. 长春:中国科学院研究生院(东北地理与农业生态研究所),2016.
Cheng Shuai. Multi-objective Optimal Allocation of Irrigation Water Resources Based on Intelligent Algorithm and GIS[D]. Changchun: Chinese Academy of Sciences (Northeast Institute of Geography and Agroecology), 2016. (in Chinese with English abstract)
[24] 高伟增,赵明富,汪志农,等. 渠道轮灌配水优化模型与复合智能算法求解[J]. 干旱地区农业研究,2011,29(6):38-42.
Gao Weizeng, Zhao Mingfu, Wang Zhinong. Optimization model of canal water distribution with GA and FS in rotation irrigation[J]. Agricultural Research in the Arid Areas, 2011, 29(6): 38-42. (in Chinese with English abstract)
[25] Zhang X, Zhang F, Zhang Y, et al. Water saving irrigation decision-making method based on big data fusion[J]. International Journal of Performability Engineering, 2019, 15(11): 2916-2926.
[26] Ebtehaj I, Bonakdari H, Gharabaghi B. Development of more accurate discharge coefficient prediction equations for rectangular side weirs using adaptive neuro-fuzzy inference system and generalized group method of data handling[J]. Measurement, 2018, 116: 473-482.
[27] Deng W, Xu J J, Song Y J, et al. Differential evolution algorithm with wavelet basis function and optimal mutation strategy for complex optimization problem[J]. Applied Soft Computing, 2021, 100: 106724.
[28] Kim J, Son H I. A voronoi diagram-based workspace partition for weak cooperation of multi-robot system in orchard[J]. IEEE Access, 2020, 8: 20676-20686.
[29] Hougardy S. The Floyd-Warshall algorithm on graphs with negative cycles[J]. Information Processing Letters, 2010, 110(8): 279-281.
Optimization model and algorithm of rotation irrigation group for drip irrigation
Li Wei1,2, Chen Weineng1, Tian Min3, Deng Hongtao3, Chen Hongli4
(1.,,510000,;2.,,832000,;3.,,832000,;4.,832000,)
A rotation irrigation is normally implemented in water-shortage regions, such as Xinjiang area of western China with widespread drip irrigation. Nevertheless, the conventional rotation irrigation group is generally divided into the fixed districts in the manual calculation. A better solution is thus highly demanding in this inefficient calculation. The rotation irrigation group is also representing the prominent regional and hydraulic characteristics in recent years. Therefore, it is necessary to clarify how to divide the rotation irrigation group in practice. Furthermore, the operation of the irrigation system needs to gradually complete the whole plot irrigation under the turn-on and turn-off valve sequence of several branch pipes in a rotation irrigation group. Correspondingly, there is a relatively high labor intensity in the operational mode, but with low investment cost, simple maintenance, and wide popularization, compared with the automatic operation of drip irrigation. In this study, a hybrid mathematical model was proposed to explore a better solution using the flow balance and structural constraints in the technical standards and division principles. Neighborhood characteristics were determined from the spatial distribution of branch pipes in the rotation irrigation group. The neighborhood search strategy and the repair of infeasible solution were given in the radius threshold range, further to find the critical path of the maximum extent. Four algorithms were selected to solve the model separately, including the Genetic Algorithm (GA), Greedy-GA, Tyson polygon-GA (Voronoi-GA), and Grid GA. The GA adopted the branch pipe model of actual number coding. The chromosome coding indicated that the branch pipe was opened in that group. The initial population was constructed using the Random, Greedy, Voronoi polygon, and Grid. The spatial distribution of branch pipe was applied in the neighborhood search strategy, further to serve as the structural feature in the rotation irrigation group. A uniform crossover strategy was adopted for the crossover and mutation of the offspring population. A competitive and elite retention strategy was adopted for the selection mechanism. Furthermore, the neighborhood structure represented the use of characteristic information. In the case of the rotation irrigation group, the spatial distribution of branch pipes presented critical structural characteristics. The specific search procedure was: first to establish the adjacency matrix of branch pipe, then to generate the reachable matrix using the Warshall, finally to calculate the critical path set for each valve, thereby converting the code. In a matrix form, the fundamental and non-key matrix was generated using a reachable matrix. Then the temporary path set was calculated and sorted to compare the valves in the non-critical matrix row for the standard deviation index. Feasible solutions were selected to update the matrix using four indicators from standard deviation, path length, connectivity, and running time. Furthermore, an optimal combination was achieved, where the mean flow rate in the rotation irrigation group was 260.06 m3/h, the standard deviation was 10.9 m3/h, the path length was 7 342.6 m, the mean path length was 8 105.2m, the mean path length within the group was 386.4 m, and the mean connectivity was 22. The neighborhood search strategy of the critical path was adopted to balance the distribution of branch pipes under the condition of objective function, suitable for daily management and maintenance. The Grid-GA and repair presented an excellent performance on the rotation operating group in a grip irrigation, particularly without the dimensional disaster in the multi-dimensional combination. Consequently, the hybrid optimal model and algorithm here can meet the hydraulic calculation and engineering requirements in modern agriculture.
models; algorithms; grid method; drip irrigation; rotation irrigation group; genetic algorithm; intelligent optimization algorithm
10.11975/j.issn.1002-6819.2021.10.009
S274.1
A
1002-6819(2021)-10-0073-09
李伟,陈伟能,田敏,等. 滴灌轮灌分组优化模型与算法[J]. 农业工程学报,2021,37(10):73-81.doi:10.11975/j.issn.1002-6819.2021.10.009 http://www.tcsae.org
Li Wei, Chen Weineng, Tian Min, et al. Optimization model and algorithm of rotation irrigation group for drip irrigation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(10): 73-81. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.10.009 http://www.tcsae.org
2021-03-21
2021-04-15
国家自然科学基金资助项目(61962053,61976093)
李伟,博士生,副教授,研究方向为群体智能与进化算法在农业工程中的应用。Email:lw200@qq.com
陈伟能,博士,教授,博士生导师,研究方向为群体智能与进化算法。Email:cschenwn@scut.edu.cn
猜你喜欢
汽车工程(2021年12期)2021-03-08
计算机技术与发展(2020年9期)2020-11-26
电子制作(2019年16期)2019-09-27
电子制作(2019年24期)2019-02-23
大陆桥视野·下(2016年12期)2017-08-03
科技与创新(2016年8期)2016-05-05
Beijing Review(2015年43期)2015-11-25
汽车科技(2015年1期)2015-02-28
中学数学杂志(初中版)(2014年1期)2014-02-28
医学理论与实践(2012年4期)2012-12-09