开绕组永磁同步电机控制策略研究
2021-09-08 15:10鹿文蓬容士兵董新伟卜智龙李松亮
电气传动自动化 2021年3期
鹿文蓬,容士兵,董新伟,卜智龙,李松亮
(1.中国矿业大学电气与动力工程学院,江苏 徐州 221000;2.中石油集团长城钻探工程有限公司国际钻井公司,北京 100000)
工业化时代,大量不可再生能源的过度利用导致能源危机,同时对生态环境也造成了严重影响。在这种背景下,大力发展电动汽车,减少对不可再生能源的利用,推动汽车行业的环保节能,是实现可持续发展、建设生态社会的必由之路。
电机是电动汽车的重要部分,已经投放到市场上的电动汽车多以永磁同步电机为主,还有一些电动汽车采用异步电机作为拖动系统。相比传统的柴油动力汽车,人们对电动汽车行驶过程的安全性有着新的期望[1]。20世纪末,学者把传统三相电机定子侧连接着的中性点打开,从而使三个绕组分别独立,然后对开放的绕组分别连接一个规格相同的三相逆变器驱动系统,从而构成了一种双逆变器驱动的新型电机,自此,开绕组电机得到了快速发展。开绕组永磁同步电机(OW-PMSM)及其拓扑系统由于存在一定的容错潜力,因此可以提高电动汽车运行过程中的可靠性[2],但采用共直流母线拓扑结构的电机驱动系统往往会产生大量的共模电压,大量共模电压作用在零序回路上便会产生零序电流,从而影响电机的寿命与运行情况。
目前,众多学者已对开绕组永磁同步电机的控制策略展开了相关研究,文献[3]针对独立直流母线拓扑结构的开绕组电机采用了一种添加固态继电器的开绕组永磁同步发电机模型,虽然能够实现开绕组电机的容错控制,但硬件的加入增加了生产成本;文献[4]采用了比例谐振控制器来对系统产生的共模电压进行抑制,但电压空间矢量合成受到影响,从而导致电机运行的稳定性下降;文献[5]采用了一种基于SPWM的容错控制策略,但该方式具有抗扰动能力差的缺陷。
本文以一台三相开绕组永磁同步电机为例,分析了双逆变器驱动系统的矢量输出情况,采用了一种可抑制共模电压的控制策略,分析了开绕组电机最常出现的单相开路故障,提出了一种SVPWM调制的容错控制方案。在理论分析的基础上,通过仿真实验对所提出的控制策略进行了验证。
1 开绕组永磁同步电机数学模型
开绕组永磁同步电机的制造过程并不复杂,仅需要在传统三相永磁同步电机的基础上稍加改动,也就是把常规电机定子侧绕组的连接线打开,使定子侧的各绕组相互独立,如图1所示。由于电机的结构发生了一定的改变,因此其电机数学方程式相比于之前也有了一定的差异。
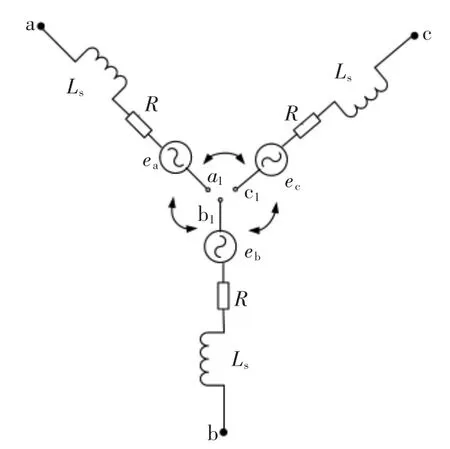
图1 开绕组永磁同步电机绕组结构图
开绕组永磁同步电机具有复杂性、非线性、多变量、强耦合的特点,这会增加在实际分析中的复杂程度,因此需要采取一定方式对其进行转化与化简。在工程数学应用领域,国内外众多学者常采用坐标变换来对模型进行处理。
坐标系变换一般基于常见的三个坐标系,即三相(abc)静止坐标系、两相静止(α β)坐标系、旋转(dq)坐标系。图2为三种不同的坐标系在空间中的位置对应情况。从图中可以看出不同坐标下,各坐标轴之间的相位分布情况。
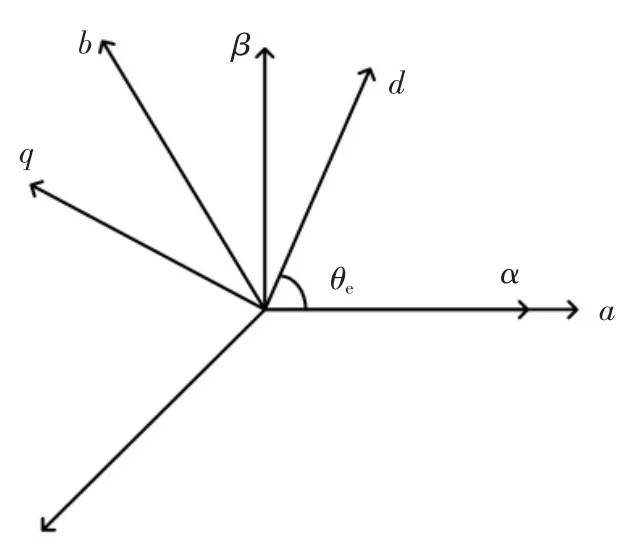
图2 三类坐标系下空间位置图
1.1 两相α、β坐标系下的数学模型
由于三相a、b、c坐标系下的数学模型较复杂,因此可以通过Clark变换得到静止α β坐标系下的电压方程式,经过计算,可以进一步获得两相α β坐标系下的其他方程式:

公式(1)中:
uα,uβ代表定子电压的αβ轴分量(V);
iα,iβ代表定子电流的αβ 轴分量(A);
eα,eβ代表反电动势在αβ 轴下分量(V);
电磁转矩方程:

在公式(2)中,ψα,ψβ代表定子磁链在静止坐标系αβ轴下分量(Wb);
经过Clark变化,相对来说可以将方程式的阶次减少,公式复杂程度略有降低,但之前存在的非线性、强耦合的特点依然没有被完全解决。
1.2 两相dq坐标系下的数学模型
为了更加容易理解电机的运行情况,需要对以上方程进一步进行转换,对上节所示的方程进行park变换,由此可以得到dq旋转坐标系下各模块的公式。首先,经过变换该坐标系下的电压方程为[12]:
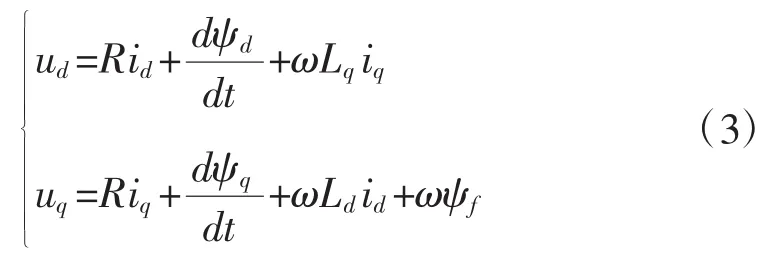
公式(3)中:
ud,uq代表定子电压的dq轴分量(V);
id,iq代表定子电流的dq轴分量(A);
Ld,Lq代表定子电感的dq轴分量(H);
磁链方程为:

电磁转矩方程为:

对于开绕组永磁同步电机,由于Ld=Lq=L,公式(5)可表示为:

根据以上分析得到开绕组永磁同步电机的数学模型,为下一步搭建开绕组永磁同步电机仿真模型提供了理论基础。
2 开绕组永磁同步电机控制策略研究
2.1 抑制共模电压的控制策略分析
图3为基于共直流母线拓扑结构的开绕组永磁同步电机,可以看出该结构由一个电压进行供电,开绕组电机双端各连接一个三相逆变器。
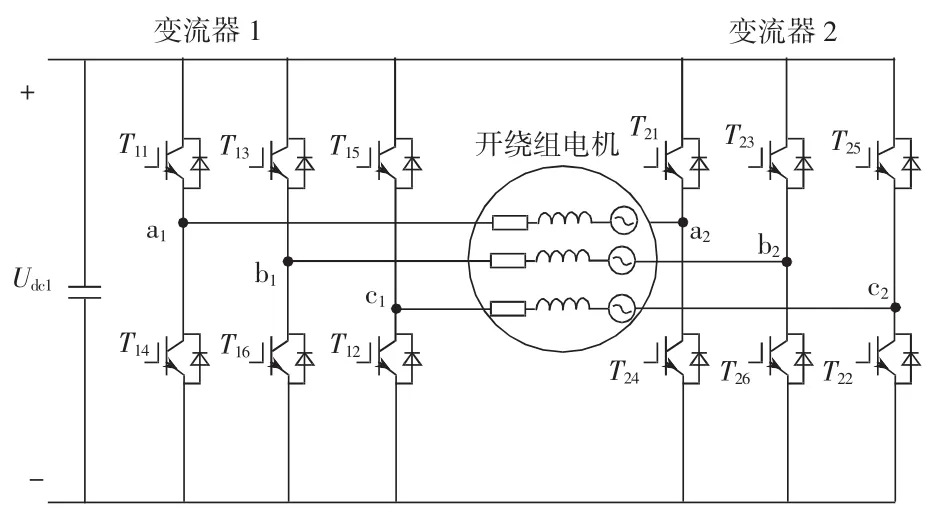
图3 基于共直流母线拓扑结构的开绕组电机
根据SVPWM控制策略从而得出双逆变器工作时系统存在26=64种有效开关组合,这些组合可以输出19种不同的电压矢量,即18个有效电压矢量和1个零电压矢量,通过对这些电压矢量进行整理,可以得到如图4中所示的位置分布。我们可以对单逆变器的工作状态进行拓展。在这里,以G(1-4’)为例,其中1代表了逆变器1输出的状态(001),带’的4’代表了逆变器2输出的开关状态(100)。
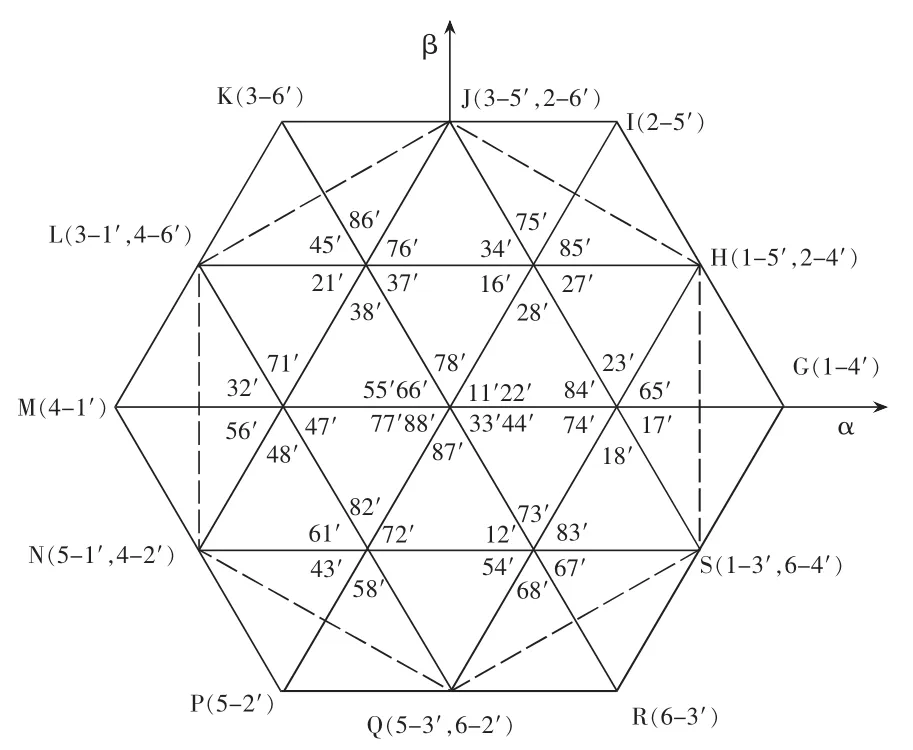
图4 电压空间矢量分布
当单个逆变器工作时,一般认为其输出的共模电压大小为[7]:

对式(7)进行拓展后,得到两个三相半桥逆变器共同作用产生共模电压的大小u0为[8]:

结合式(8)与图4,我们可以得到双逆变器状态下各开关组合与其对应系统输出共模电压的关系。
由表1能够看到当两个逆变器共同工作时系统产生±Udc,±2Udc/3,0和±Udc/3七种不同的共模电压值。在这些开关组合中,存在20种开关状态不会导致共模电压的产生,其中有效矢量有12种,零矢量有8种。结合图4可以看出,这12种开关组合方式输出的矢量恰好可以组成一个正六边形,即由ON,OQ,OS,OH,OJ,OL构成的顶点为NQSHJL的区域,如图4中虚线所围成的图形。因此,对于采用共直流母线拓扑结构的系统,如果进行控制的时候可以始终在这个六边形中进行调制,就可以避免系统产生共模电压。
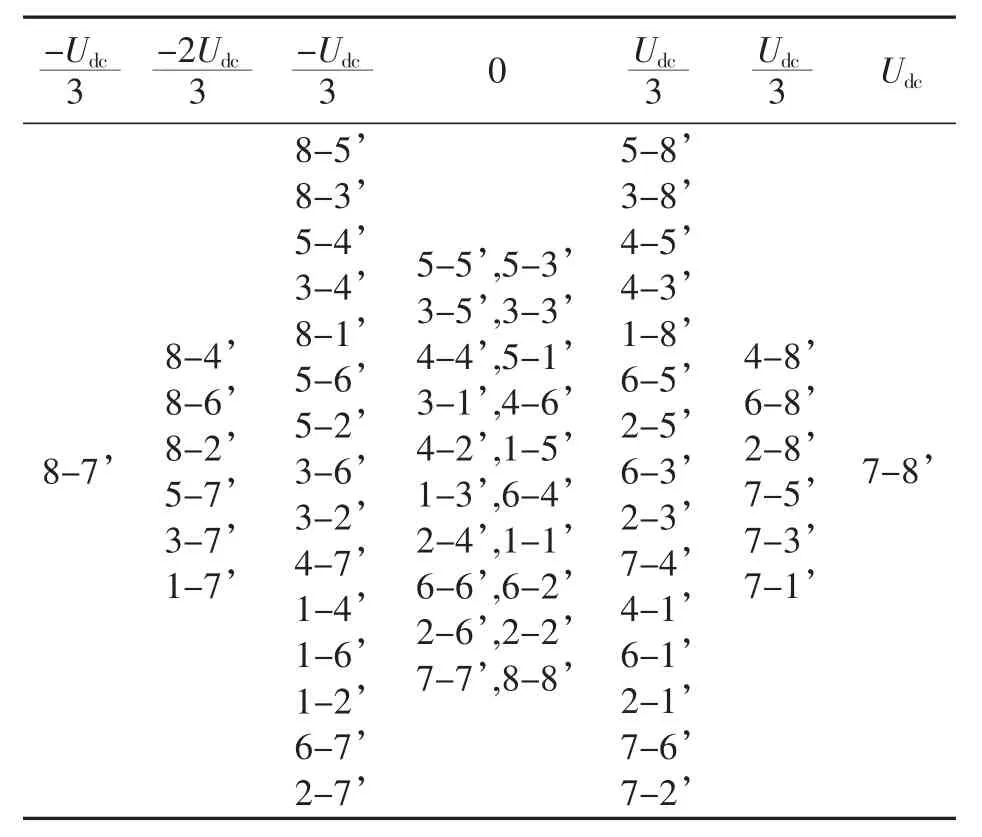
表1 开关组合与输出共模电压对应关系
2.2 开绕组永磁同步电机容错控制策略研究
对于开绕组永磁同步电机的容错控制,传统的解决方案都从硬件入手,这不仅增加了控制难度,还提高了制造成本。因此本文从控制策略的角度入手,来实现开绕组永磁同步电机的容错控制。
对于共直流母线双逆变器系统所能输出的全部电压矢量来说,仅有个别矢量如OP,OR,OG,OK,OM和OI的输出方式比较单一,不存在其他组合方式,其余电压空间矢量均呈现一个矢量可以由多种开关方式输出的情况,如图4所示。因此,对于开绕组永磁电机驱动系统来说,当单个功率器件发生故障时,可以利用剩余的开关状态来实现故障的重构。以图3中A相的功率开关器件T11损坏时出现的故障为例,此时输出Sa1=0,当系统检测到开绕组电机A相存在异常时,需要对A相有关的功率器件的PWM驱动信号进行封锁,故障情况下需要对双逆变器驱动系统进行重构。图5为其中一相开路,其余两相工作的重构拓扑示意图。
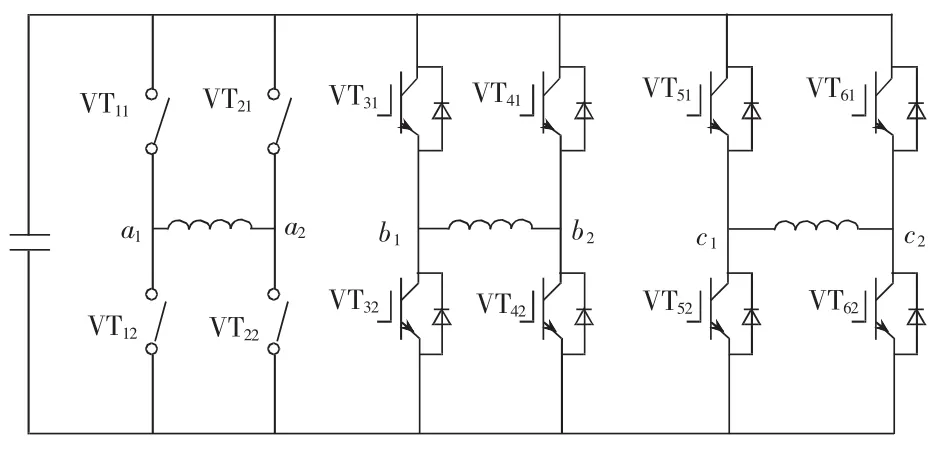
图5 两相重构拓扑结构图
以图5所示拓扑结构中的开关器件VT11发生故障时为例,分析此时双逆变器输出电压空间矢量的状况。
正常情况下,电压空间矢量OA可由(101001)、(100111)、(100000)、(111011)、(000011) 以 及(110010)来进行输出。当VT11发生故障不能导通时,此时只有(000011)这一开关组合能够正常输出OA矢量,而其他开关组合均不能正常输出OA电压空间矢量。同理,可以分析出VT11故障时对其他开关组合产生的影响。VT11故障后输出电压矢量的情况和开关状态如表2所示。
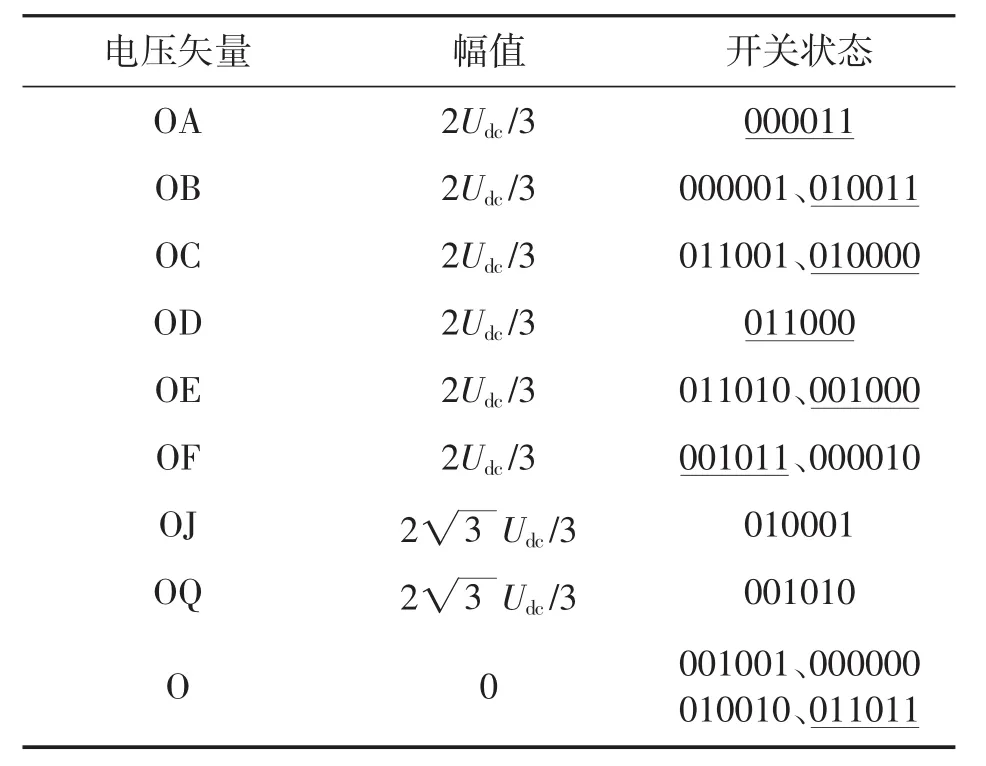
表2 单相开路故障下系统输出矢量情况表
对A相发生故障时其余相所能输出的电压空间矢量分布,可以得到新的电压空间矢量图如图6所示。虽然故障情况下空间矢量调制的范围是一个菱形,但是在工程领域,为了尽可能输出圆形旋转磁场以保证系统的稳定运行,六边形ABCDEF更适合作为矢量调制区域,因此可选择表2中带有下划线部分的开关组合去驱动电机的容错运行。
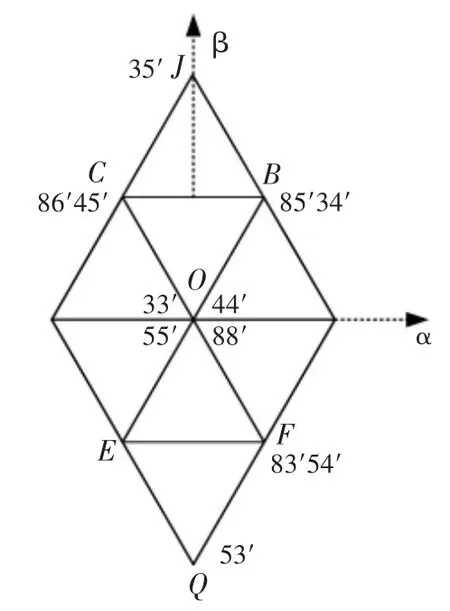
图6 单相故障下电压空间矢量分布
在实际应用中,为了保证容错运行时电机能在一定负载下维持原有的转速不变,在直流侧电压不变的情况下,功率开关器件上通过的电流将将随之改变。由于本文在闭环控制时仍然采用了id=0的控制方式,因此三相定子电流中只含有交轴分量,由电压极限圆和电流极限圆公式得到电机的最大转矩输出能力为[12]:

3 开绕组永磁同步电机仿真实验分析
仿真过程中一些必要的参数设定为:直流侧电压给定311V,额定负载TL=7N·m,额定转速大小为1000r/min,PWM频率设置为10kHz,系统仿真共运行0.3s。
3.1 正常运行状态下系统仿真实验
图7为电机启动后转速的波形,通过转速波形可以看出电机在0.05s后进入额定转速,整个启动过程中转速超调仅有3%,稳态误差0.5%。
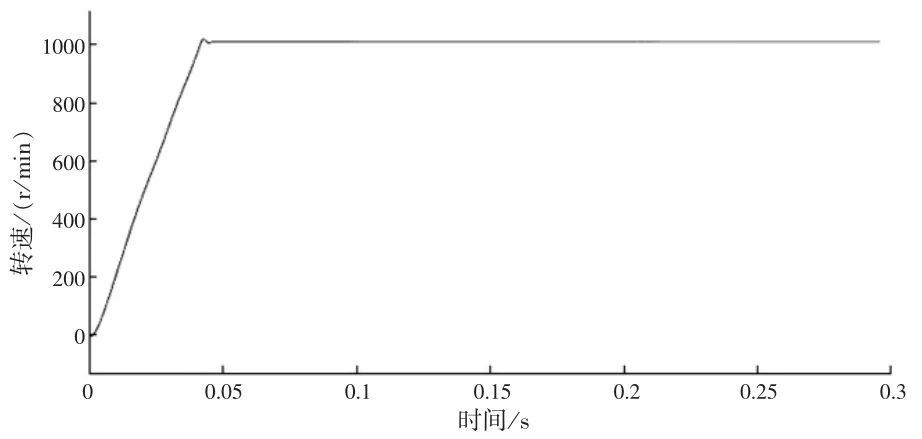
图7 电机转速波形
图8为OW-PMSM在运行过程中输出电磁转矩的情况,通过输出转矩波形可以看出电机启动时启动转矩较大,达到额定转速后,电磁转矩跟随负载转矩并保持定值。
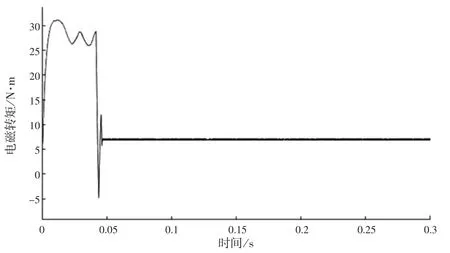
图8 电磁转矩波形
图9为定子侧三相电流波形,电机启动过程中电流幅值较大,转速稳定后电流波形呈正弦且最大幅值在26.5A左右。

图9 三相电流波形
如图10所示,当采用Id=0的控制方式后,系统dq轴电流出现了不同的状态,直轴电流在电机运行稳定后保持0值不变,即直轴是不贡献转矩的,电机所有的电流全部来源于q轴,并为系统提供电磁转矩。

图10 dq轴电流波形
采用抑制共模电压的控制策略后,经过仿真得到系统输出共模电压的波形如图11所示,可以看出系统产生的共模电压基本为零。

图11 共模电压波形
3.2 容错运行状态下系统仿真实验
根据图12和图13所示的内容可以得到,当采用容错控制策略时,电机在额定负载下可以输出正常的转速与转矩。电机在启动后转速迅速上升且略有超调,最终在0.12秒达到额定转速并保持稳定运行,电机在启动过程中输出的电磁转矩较大,达到额定转速后,电磁转矩最终稳定在7N·m。
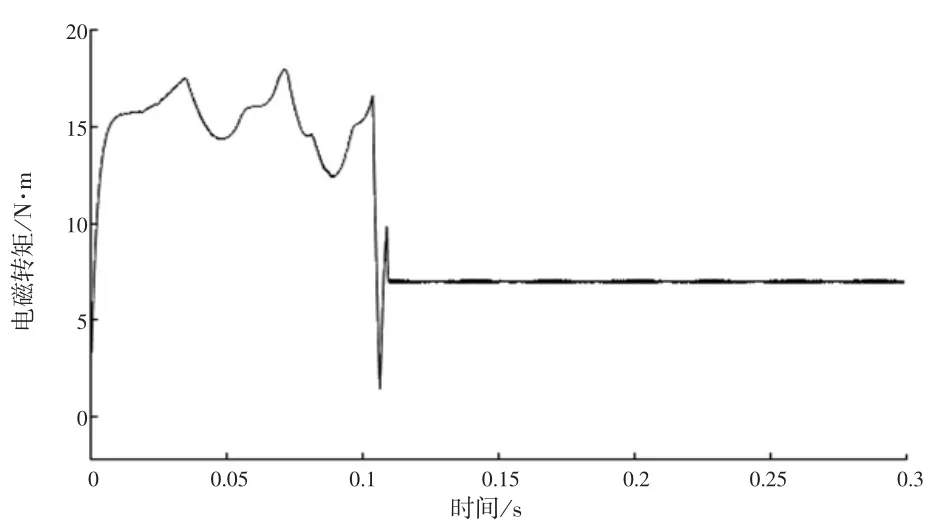
图12 电磁转矩波形
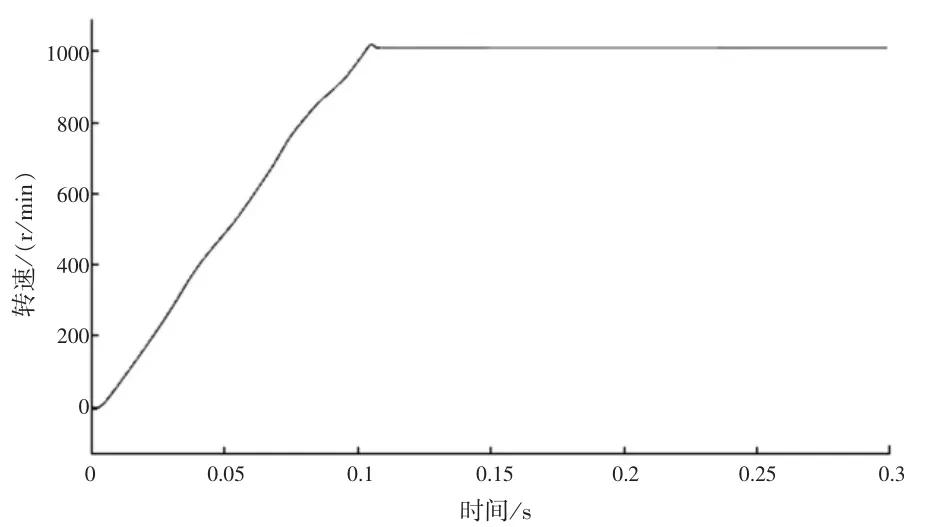
图13 电机转速波形
图14为电机三相电流波形,从图中可以看出,a相电压电流值始终为0,b、c两相电流呈正弦且相位互差60°,与正常运行时相比,电流最大值增加到46A左右以维持输出转矩不变,这与前文的理论分析相一致。
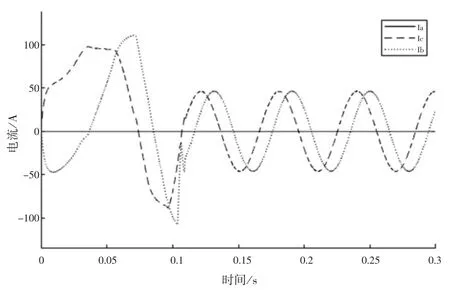
图14 容错状态下三相电流波形
图15为系统产生的共模电压波形,由于容错控制仅在六边形ABCDEF区域进行调制,结合表1可以看出,该区域中的各电压空间矢量都会产生较大的共模电压,因此,在进行容错驱动控制时,系统不可避免的出现了大量的共模电压和零序电流。
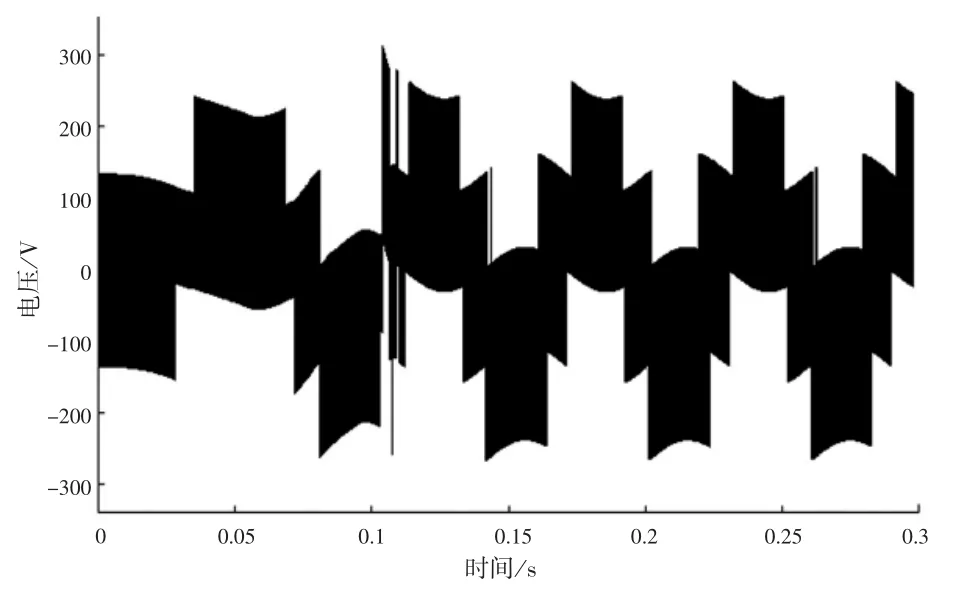
图15 容错运行时系统产生的共模电压
图16为d轴与q轴电流波形,可以看出,在容错控制策略下,Id=0的控制方式仍然有效,电机转速稳定后,d轴电流在0值上下波动。
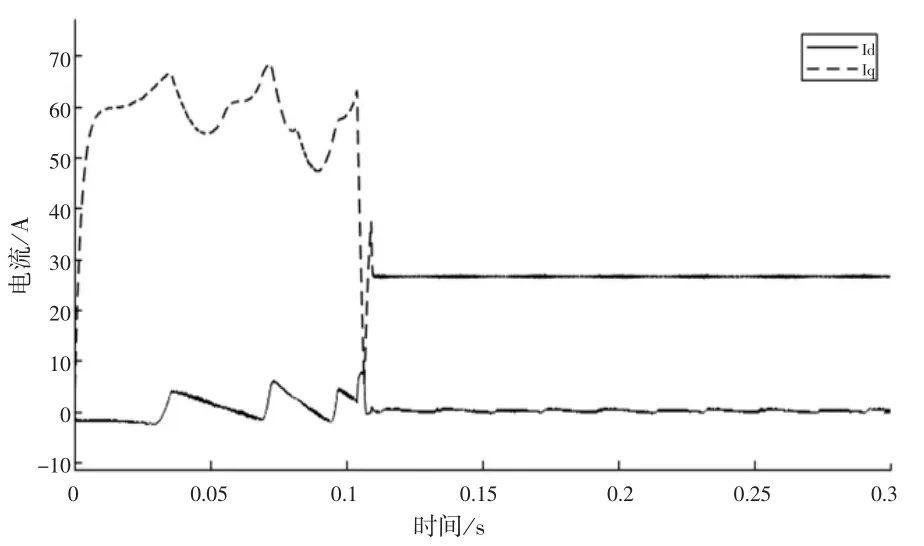
图16 dq轴电流波形
4 结论
本文对开绕组永磁同步电机的数学模型进行了研究,进而在Simulink仿真平台上搭建了开绕组永磁同步电机的控制模型。为实现对共直流母线拓扑结构所产生的零序电压的抑制,采用了一种消除共模电压的矢量调制方法,从而达到了对零序电流的抑制。针对开绕组电机常出现的单相开路故障,本文研究了开绕组电机发生单相故障时电压矢量的输出分布情况,对剩余开关器件的开通信号进行重新分配,从而驱动电机的容错运行。该研究为汽车电机的选择提供了新方案,开绕组永磁同步电机的应用可进一步提高电动汽车运行的可靠性。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
电源技术(2015年9期)2015-06-05
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年5期)2014-04-09
郑州大学学报(理学版)(2014年4期)2014-03-01
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
电子设计工程(2014年23期)2014-02-27