基于Ansys Workbench的齿轮副有限元分析
2021-09-10 07:22王园
内燃机与配件 2021年7期
关键词:有限元分析
王园





摘要:摆线针轮减速器作为重要的机械传动部件具有体积小、重量轻、传动效率高、传动比大、承载能力强和使用寿命长等优点,广泛应用于现代工业诸多领域中。本文针对变桨减速器技术要求,通过典型摆线针轮减速器的传动原理及结构特点分析,建立齿轮、摆线轮等关键零部件的计算模型,并进行静力学有限元分析,其中对代表性的齿轮副进行了有限元模型的建立,并在Ansys Workbench中进行分析,包括一对外啮合齿轮副、摆线轮与针齿接触副,最后将有限元分析结果与解析法结果相比较。
Abstract: The cycloidal pin-wheel reducer is one of the most important transmission components of the pumping unit by its small volume, light weight, high efficiency, large transmission ratio, large load capacity and long effective life, and has been widely used in many fields of modern industry. According to the reducer technical requirements, analyze the representative gear pair of finite element model,through the typical of cycloidal pinwheel reducer transmission principle and structure characteristics analysis,including an external meshing gears, needle cycloid gear with tooth contact pair.
关键词:齿轮副;静力学分析;有限元分析
Key words: gear pair;the statics analysis;finite element analysis
中图分类号:O312.3 文獻标识码:A 文章编号:1674-957X(2021)07-0052-04
0 引言
摆线针轮行星减速器是机械装备中相当重要的传动装置。摆线针轮行星传动的行星齿轮齿廓曲线不是渐开线,而是变幅外摆线的内侧等距曲线,一般采用短幅外摆线的等距曲线。
目前,国内外许多专家学者在结构设计等方面做了大量系统深入的研究,建立了诸多的设计理论及分析方法。韩双江等基于摆线成形原理及设计要求对摆线行星减速器的摆线轮齿廓形状复杂、难加工等问题进行了SolidWorks运动仿真,探讨了准确绘制摆线轮齿廓形状的方法[1]。陈兵奎等提出了齿间具有双接触线的新型摆线传动,它是在摆线针轮行星传动中采用双包络啮合理论产生的,通过理论分析和数值算例研究了其啮合特点,并对物理样机进行了试制及测试了传动误差,表明双包络理论可以应用于摆线针轮行星传动[2]。
风电变桨减速器主要采用行星轮系2K-H类NGW型,此外也有摆线针轮变桨减速器,如吴声震申请的专利:风电单级变桨双摆线减速器[3]、风电双摆线变桨减速器[4]、风电三片摆线变桨减速器[5]。本文在现有风电变桨减速器的基础上,合理的设计风电变桨减速器结构,提高减速器的承载能力、传递效率和使用寿命,并对在实际应用中易受损的齿轮副进行静力学有限元分析。
1 齿轮参数设计
1.1 齿轮材料选择
RV传动包括直齿圆柱齿轮行星传动和摆线针轮行星传动,其中直齿圆柱齿轮副z1-z2根据齿面接触强度初步确定齿轮副主要参数,然后进行齿面接触疲劳强度和齿根弯曲疲劳强度验算,最后确定该齿轮副的几何尺寸。为减少传动件尺寸,摆线轮、针齿均应用选用轴承钢GCr15,表面硬度为58~62HRC,许用接触应力[σH]=1500MPa。
1.2 齿轮参数设计
本文所研究的摆线轮的齿数和针齿齿数分别为zc=z4=49,zp=z5=50,输出力矩Tb=Tv=4911.55N·m。在RV传动中,输出力矩Tv为摆线轮啮合力力矩T4及输入力矩Ta的合力矩,但Tb远小于啮合力矩,且确保摆线轮安全可靠,按Tv设计计算并校核摆线轮。摆线轮和针齿齿面的失效形式主要是疲劳点蚀和胶合,这里只校核其齿面接触强度。
①短幅系数K1,初步选取K1=0.8。
②针径系数K2,初步选取K2=1.35。
根据插值法取Y1max=1.95。代入数据计算得:σH=1368.42MPa。σH<[σH]=1500MPa,接触强度满足要求。
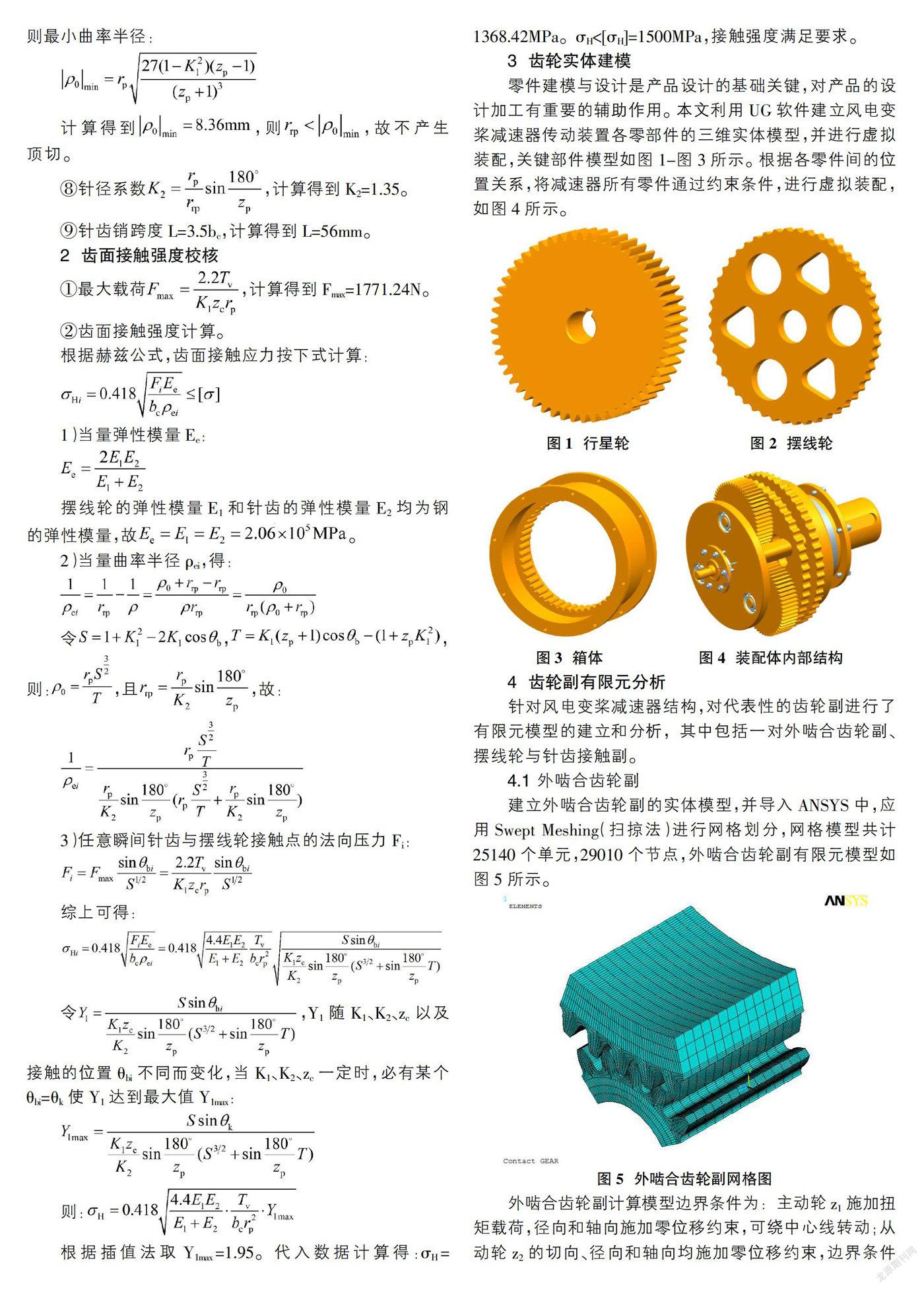
3 齿轮实体建模
零件建模与设计是产品设计的基础关键,对产品的设计加工有重要的辅助作用。本文利用UG软件建立风电变桨减速器传动装置各零部件的三维实体模型,并进行虚拟装配,关键部件模型如图1-图3所示。根据各零件间的位置关系,将减速器所有零件通过约束条件,进行虚拟装配,如图4所示。
4 齿轮副有限元分析
针对风电变桨减速器结构,对代表性的齿轮副进行了有限元模型的建立和分析,其中包括一对外啮合齿轮副、摆线轮与针齿接触副。
4.1 外啮合齿轮副
建立外啮合齿轮副的实体模型,并导入ANSYS中,应用Swept Meshing(扫掠法)进行网格划分,网格模型共计25140个单元,29010个节点,外啮合齿轮副有限元模型如图5所示。
外啮合齿轮副计算模型边界条件为:主动轮z1施加扭矩载荷,径向和轴向施加零位移约束,可绕中心线转动;从动轮z2的切向、径向和轴向均施加零位移约束,边界条件如图6所示。
4.2 摆线轮与针齿接触副
将建立的实体模型导入ANSYS Workbench中,建立摆线轮与针齿接触副有限元模型,应用Hex Dominat法进行网格划分,共计116254个单元,455334个节点,网格模型如图7所示。
摆线轮与针齿接触副有限元模型分析边界条件为:针齿外圈切向、径向和轴向均施加零位移约束;摆线轮三个分布的轴承孔面径向和轴向施加零位移约束,并施加轴承载荷,如图8所示。
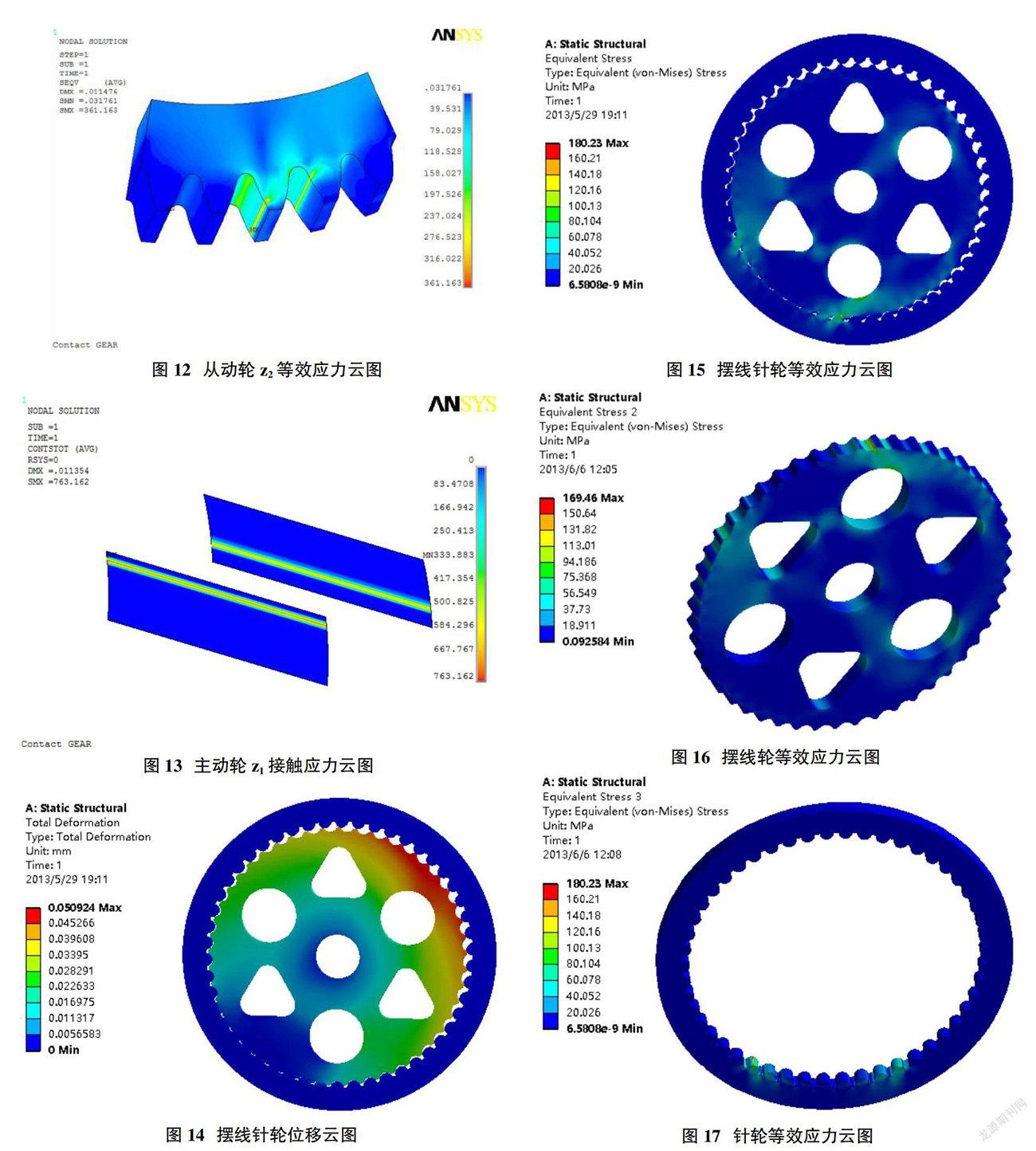
4.3 啮合齿轮副有限元计算结果
针对前面建立的有限元模型,对啮合齿轮副进行有限元求解,得出齿轮副的综合位移、等效应力及接触应力云图,如图9~图13所示。由图可知,齿轮副综合位移为0.021952mm,等效应力为433.6MPa(其中主动轮等效应力为433.6MPa,从动轮等效应力为361.2MPa),接觸应力为763.2MPa。与前文解析法计算结果相比,由于有限元分析时未考虑使用系数,计算结果相对偏小。
摆线轮与针齿接触副的有限元计算结果如图14~图17所示。由图可知,综合位移为0.050924mm,摆线针轮等效应力为180.23MPa(其中摆线轮等效应力为169.46MPa,针齿等效应力为180.23MPa)。
5 总结
本文根据各部件的受力分析,利用解析公式对齿轮等关键零部件进行了静力计算和强度校核,建立了关键零部件的简化模型,在ANSYS/Workbench 14中对简化模型创建材料、进行网格划分、施加边界条件和载荷,从而得到了关键零部件的有限元分析模型;而后进行有限元分析,得到了各关键零部件的综合位移及等效应力云图,对有限元分析结果进行了分析和比较,得出各关键零部件均满足强度要求。
参考文献:
[1]韩双江,孙传祝.COSMOSMotion在摆线轮设计中的应用[J].机械设计,2008,25(10):5-7.
[2]Chen Bingkui, Zhong Hui, Liu Jingya, et al. Generation and investigation of a new cycloid drive with double contact[J]. Mechanism and Machine Theory, 2012, 49: 270-283.
[3]吴声震.风力发电单级变桨双摆线减速器[P].中国专利, 201010174474.X.
[4]吴声震.风力发电双摆线变桨减速器[P].中国专利, 201010174514.0.
[5]吴声震.风力发电三片摆线变桨减速器[P].中国专利, 201010174499.X.
[6]机械设计手册编委会.机械设计手册(单行本)轮系[M].北京:机械工业出版社,2007.
[7]何卫东,李力行.RV传动的研究[J].大连铁道学院学报, 1993,14(3):104-107.
[8]董向阳,邓建一,陈建平.RV传动机构的受力分析[J].上海交通大学学报,1996,30(5):65-70,84.
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
企业技术开发·下旬刊(2016年11期)2016-12-27
现代商贸工业(2016年25期)2016-12-26
演艺科技(2016年11期)2016-12-24
山东工业技术(2016年23期)2016-12-23
山东工业技术(2016年23期)2016-12-23
文艺生活·中旬刊(2016年11期)2016-12-13
航空兵器(2016年4期)2016-11-28
科学与财富(2016年15期)2016-11-24
科技视界(2016年18期)2016-11-03