
改进GSO与二维OTSU融合的红外图像多阈值分割方法
2021-09-23 08:53刘沛津
应用光学 2021年4期
刘沛津,王 曦,贺 宁
(西安建筑科技大学 机电工程学院,陕西 西安 710055)
引言
电气设备的正常运行不仅对电网供电稳定性具有重要影响,而且是操作人员及实验设备安全的基础。据统计电力系统事故中90%是由电气设备故障引起,而出现故障的电气设备中约50%会在早期阶段表现出不正常的发热症状[1]。红外诊断技术作为故障诊断的一种有效手段,能够有效地对电力设备运行中的过热缺陷进行检测和诊断[2]。但是,由于热辐射现象普遍,红外图像在接收目标设备的红外信号时,无法避免大量未检测目标热辐射信息的干扰,因此红外图像必然存在不相关背景噪声、对比度低的问题[3]。对于运行中的电气设备红外图像情况更为复杂,除无关背景干扰之外,电气设备不同部位发热情况也不同,导致红外图像信息量更多,增加了电气设备红外图像分割的难度。文献[4]采用基于加权切比雪夫距离的K-means 算法对变电站设备红外图像进行分割,能够较好地将目标区域完整的分割出来;文献[5]采用了一种基于粒子群优化方法的 Niblack 电气设备红外图像分割算法,能较好地将电气设备轮廓分割,同时提高了分割效率;文献[6] 提出一种基于红外可见光图像配准的电气设备分割方法,实现了电气设备的分割,以便于进行故障检测。但文献[4]~[6]中的方法都有一个共同的缺陷,只能将背景与电气设备轮廓分割,但当电气设备内部故障程度不同时,单单只分割出设备的轮廓远远不够,对其故障区域分类就显得非常重要,尤其是突出温度最高区域,为了将不同温度区域分割开,进行多阈值分割是非常必要的。在多阈值分割过程中,最大类间方差法(Nobuyuki OTSU,OTSU)是最常用的分割方法之一[7],但是一维OTSU 算法没有考虑到周围像素点对中心像素点的影响,不能很好地处理图像中的噪声,二维OTSU 算法在图像分割效果上虽取得了很大的改善,但仍存在耗时多、图像分割精度低、图像误分割等不足,进而影响计算效率[8]。2005年,Krishnanand 和 Ghose 提出了一种新的基于萤火虫行为的智能算法(glowworm swarm optimization,GSO)[5],它的灵感来源于萤火虫之间的趋光性寻优[9],不仅成功应用于群体机器人的协同运作,还用于图像的多阈值分割。
基于此,针对传统的GSO 与二维OTSU 算法融合时,GSO 容易陷入局部最优的缺陷[10],对GSO算法进行了优化改进。其中在萤火虫的移动过程中引入非线性递减步长以及新的移动策略,并将局部寻优扩展到全局寻优。实验结果表明:本文融合算法在分割速度和精度上均显著优于二维OTSU 及未改进GSO与二维OTSU融合算法,可高效准确分割运行的电气设备红外图像的异常区域。
1 改进的萤火虫优化算法
在基本的萤火虫算法中,所有萤火虫都会被荧光强度大于自身荧光强度的群体所吸引。各萤火虫通过不断地寻找周围最亮群体,最终形成几个最优群体[11]。在整个寻优过程中包含荧光素更新、邻居的选择、移动概率计算、位置及决策半径的更新[12]。本节就基本的GSO 寻优过程中存在的部分缺陷进行分析并作了相应改进。
1.1 GSO 算法位置更新方程收敛性能分析
根据萤火虫个体移动的可能性,基本的GSO更新策略如(1)式所示:

式中:xi(t)表示第i个体在t时刻的位置;||xj(t)-xi(t)||为两者之间的欧氏距离;s为步长。
分析GSO 算法的位置更新(1)式,可以推算(2)式:

式中:萤火虫个体开始位置为xi(0);在t时刻,萤火虫的位置由xi(0)、步长s和矢量xj(m)-xi(m)的方向决定,为确保萤火虫能够全局收敛,GSO 算法的收敛性将由步长s和矢量xj(m)-xi(m)的方向决定,因而至为重要。
1.2 非线性递减步长
基本的GSO 算法寻优过程中,步长被设置为一个固定值,并被要求小于一个极小值ε,因而导致算法的收敛速度很慢[13]。在实际应用中,GSO 算法需要动态优化步长,步长是与迭代次数有关的函数,且两者不是线性关系[14]。也就是说在搜索初期,萤火虫个体与最优解之间的距离较远,步长较大,收敛速度较快;后期又要逐步减小步长,为了保证收敛精度,步长又不宜过大[12];另外空间维数越高,步长越大。本文根据迭代次数及搜索维数提出一种非线性减小的自适应步长s,如(3)式所示:

式中:Smax表示最大步长;Smin表示最小步长;最大迭代次数Niter_max取值为100;c为空间维数;a为调节参数。
分析(3)式可知,当t=0 时,步长取最大。随着时间增加,该函数类似于指数函数,且底数(smin/smax)小于1,则随着时间增加,步长s将非线性减小,在同一时刻下,维数越多,其步长也满足越大的原则。
1.3 移动策略改进
在基本的GSO 算法中,当邻域集内萤火虫j比萤火虫i的荧光素值大时,则萤火虫向邻域j运动,但都仅仅是局部寻找最亮邻域,为了使得各萤火虫具有全局搜索能力,即在每次迭代过程中引入了全局信息,使得各萤火虫都能在全局寻找到适合自己的最优位置。移动策略如(4)式所示:

式中:xi(t)表示第i个体在t时刻的位置;||xj(t)-xi(t)||为两者之间的欧氏距离;s为步长;cg为全局最优吸引常数;g(t)为全局最优位置。
图1 给出了萤火虫算法寻优过程的模型图,其中黑色的星型小物体代表萤火虫,其个体在空间随机分布,蓝色的区域表示亮度较小的区域,黄色的区域代表亮度较大的区域。寻优后的结果如图2所示。从图2 可以发现,在寻优结束后萤火虫在较亮的黄色区域形成了几个最优群体。

图1 萤火虫初始分布图Fig.1 Initial distribution diagram of glowworm swarm

图2 萤火虫收敛后群体分布Fig.2 Population distribution of glowworm swarm after convergence
2 二维OTSU 结合IGSO 图像分割算法步骤
在红外电气设备图像分割过程中,将OTSU 与IGSO 进行融合,IGSO 算法的目标函数为OTSU 的最大累间方差函数。从而把红外图像最佳阈值的确定问题转化为目标函数的最优值问题。根据种群荧光更新、邻域选择、位置更新以及第1 节中确定的决策范围,完成萤火虫种群的全局迭代,得到最优解。具体分割步骤如图3所示。

图3 电气设备红外图像分割流程图Fig.3 Flow chart of infrared image segmentation for electrical equipment
图3 流程图中,目标函数的值用二维最大累间方差公式来表示,步长采用本文改进的自适应递减步长(3)式代替传统的步长,位置的更新采用(4)式的全局移动策略。通过100 次迭代寻优,形成几个最亮萤火虫群体,该群体对应的位置将是萤火虫几个群体的最优适应度值,进而可以确定出几组最优的分割阈值,实现对电气设备红外图像的多阈值分割,以将不同故障区域分割出来,并重点突出故障区域最高温度区域。
为了确保改进后的IGSO 算法能够找到图像分割的全局最优阈值,感知范围覆盖图像整个空间,感知半径取255,其中萤火虫的最大步长smax=3,最小步长设置为0.01。
算法中各个参数的值如表1所示,分别给出了GSO 以及IGSO 寻优过程中必要参数的值,具体的参数可参考文献[15]。

表1 萤火虫算法参数设置Table 1 Parameter setting of glowworm swarm optimization algorithm
3 实验结果与分析
基于不同波段红外成像原理,为了准确捕获运行设备实际温度变化,本文采用FLIR Systems 公司生产的T360 长波非制冷焦平面红外热成像仪拍摄运行电机红外图像,并对图像进行分析。该仪器热成像像素为160×120,光学镜头焦距25 cm,发射率0.95。
图4(a)为电机过载红外图像,电机温度最高区域在方框内呈现,最高温度达到了47.7 ℃,十字光标处即点温度为46.3 ℃。图5(a)为通电线管图,其中线路管道方框内最高温度为37.4 ℃,点温度为37.3 ℃。为了更清楚地判断温度较高区域,将不同温度区域进行划分,对图像进行多个阈值的分割,在分割过程中发现本文实验图像分割阈值超过5 个以后,分割效果变得不理想,且随阈值增加,迭代时间变长,因此实验时分割阈值最多取5。双阈值到五阈值分割的实验结果如图4、图5所示。

图4 过载电机图及不同阈值分割图像Fig.4 Overload motor diagram and segmentation images with different thresholds

图5 通电线管图及不同阈值分割图像Fig.5 Energized pipeline diagram and segmentation images with different thresholds
图4、图5 分别为电流过载的电机图,通电线管图以及多阈值分割后的结果。图4 和图5 中的(c)、(d)分别为双阈值、三阈值分割的结果,图4(c)、4(d)中能将电机发热区域轮廓分割出来、图5(c)、5(d)中能将通电线管轮廓分割出来,但是达不到对不同温度区域进行划分。图4 和图5中的(e)、(f)分别为四阈值、五阈值分割后的结果,图4(e)、4(f)中可以将电机温度不同的部位分割出来,图5(e)、5(f)中亦能将线路管道不同温度区域加以区分。但是从图4、图5 的(e)、(f)分割效果来看,每幅图中四阈值分割后的图像干扰较多,而经过五阈值分割后的图像既能排除周围区域的干扰,又能将最高温度区域突出,因而对故障区域的检测有良好的效果。
为了进一步论证本文改进算法分割结果的优越性与高效性,选取图4(b),分别采用二维OTSU阈值法、OTSU 结合GSO 分割法进行五阈值分割,并将结果与本文改进算法分割结果进行对比,如图6所示。
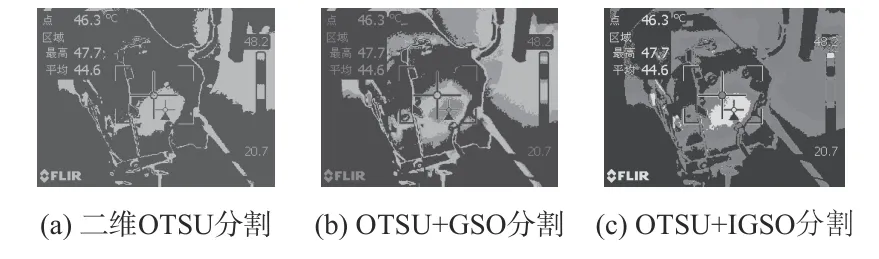
图6 各算法阈值分割结果Fig.6 Threshold segmentation results of each algorithm
从图6 各算法阈值分割结果图可以发现,图6(a)所示的二维OTSU 分割结果,其温度最高区域与其他温度区域已融为一体,分割效果不符合预期且耗时最长;图6(b)中OTSU 结合GSO 虽然可以将不同温度区域进行区分,但是温度最高区域分割效果不突出;图6(c)为本文改进的GSO 结合OTSU 分割结果,其温度最高区域被很好地分割且分割效果突出,其余温度区域及电机轮廓也被很好地分割出来。
图7、图8 和图9 分别为采用IGSO 结合OTSU的迭代次数和适应度值关系图、迭代次数和收敛值关系图、像素和停止规则关系图。
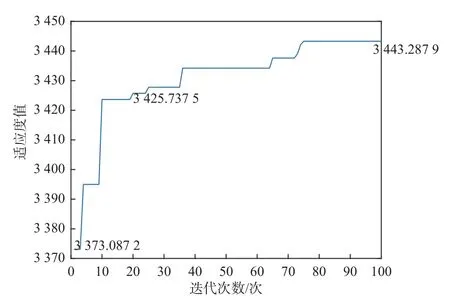
图7 迭代次数和适应度值关系图Fig.7 Relationship between iterations and fitness value

图8 迭代次数和收敛值关系图Fig.8 Relationship between iterations and convergence value

图9 像素和停止规则关系图Fig.9 Relationship between pixel and stop rule
从图7~图9 中可以发现,当迭代次数达到80 次后,适应度值基本保持不变,可以稳定在3 443.287 附近,即在80 次之后寻优过程基本稳定,最终确定收敛阈值,靠近该阈值区域范围的值将在这5 个阈值停止,最终完成寻优。表2 为选取图4(b)红外图像分别应用各算法进行双阈值到五阈值分割的运行时间及阈值。
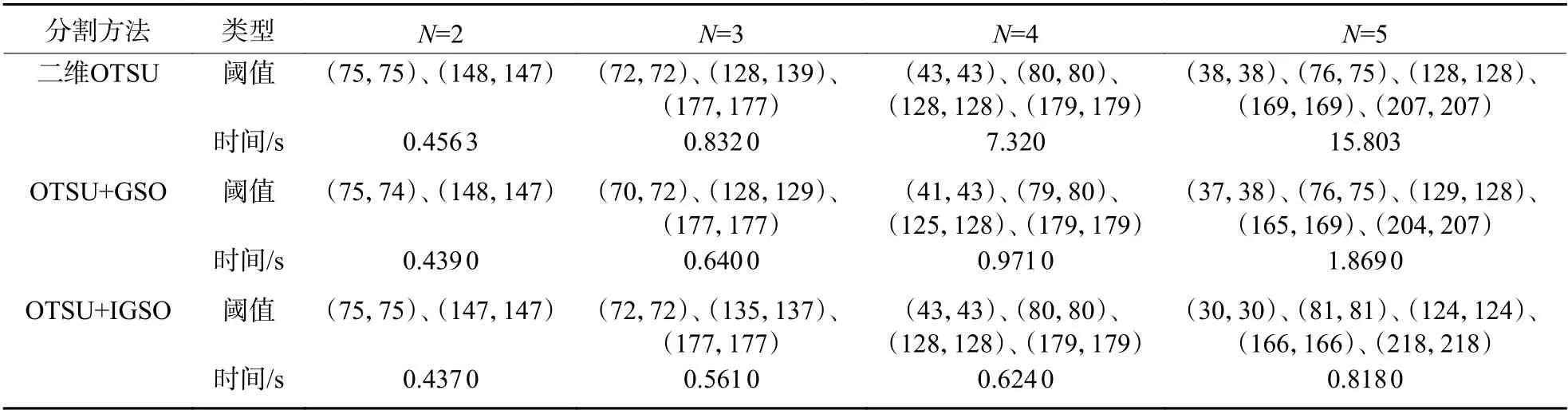
表2 各算法分割阈值及运行时间Table 2 Segmentation threshold and running time of each algorithm
对上述3 种分割方法的结果从阈值以及运行时间2 个参数进行性能分析,可以得出:只采用二维OTSU 分割方法随着维数的增加,运行最慢,在五阈值时已达到15.803 s,不符合分割的高效性;采用OTSU 与GSO 相结合的方法,在五阈值时分割时间为1.869 0 s;本文改进算法在五阈值分割时只需要0.818 0 s,分割速度分别提高19 倍、1.28 倍。实验结果表明,上本文算法较二维OTSU 及未改进GSO与二维OTSU融合算法更能准确分割运行电气设备图像异常区域,
4 结论
本文选取了过载电机、通电线管两类具有代表性的电气设备红外图像进行分割,在分割过程中,提出了一种改进的GSO 与二维OTSU 的融合算法来提高电气设备红外图像多阈值分割的实时性与准确度。实验结果表明,所提出的算法有效可行,且与OTSU 分割算法,普通的GSO 与OTSU融合算法相比,本文算法都能够得到较优的结果,并具有较快的处理速度。综上所述,本文算法不仅适用于单个设备内部发热故障区域的精确检测,同时也能从复杂的环境中分割出特定恒温设备,具体的分割阈值根据图像的复杂度进行调节,具有较大的普遍适用性,为红外图像早期故障的有效识别与定位奠定基础。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
成都信息工程大学学报(2021年5期)2021-12-30
金桥(2018年4期)2018-09-26
小天使·一年级语数英综合(2018年7期)2018-09-12
小天使·一年级语数英综合(2017年6期)2017-06-07
为了孩子(孕0~3岁)(2016年1期)2016-01-16
小天使·一年级语数英综合(2015年8期)2015-07-06
河北科技大学学报(2015年5期)2015-03-11
中国卫生(2014年5期)2014-11-10
