基于毫米波雷达的复合翼构型无人机避障系统研究
2021-09-26 07:34程子啸
机电工程技术 2021年8期
程子啸
(亿航智能设备(广州)有限公司技术部, 广州 510663)
0 引言
近年来,随着无人机技术的发展与应用需求的不断升级,人们对行业应用级无人机的要求也逐渐提升[1]。在此背景下,同时具备自主飞行、垂直起降、长航程、长航时等优点的复合翼构型飞行器受到了国内外科研高校、科技公司、军方等组织的青睐[2]。随着该项技术的发展与成熟,复合翼无人机现已开始应用于地理测绘、电力巡检、森火探测等场景[3-5]。预期在不久的将来,此类无人机因其优势,占据市场的龙头地位[6]。
在这些应用场景下,飞行器因其超视距操控、飞行速度快等特点,存在撞击山体或高层建筑的隐患。为规避这种风险,一般的作法是由操作员在进行航线规划的时候,基于地理信息系统GIS(Geographic Information System)来规划各航点的高度,使无人机飞行高度高于系统提供的地形高度[4]。同时辅以影像系统,地面操作员根据机载摄像头回传的图像信息,人为判断和干预飞行器的飞行来进行回避。但受制于地图可能存在的信息不全、滞后、精度不足等情形,以及回传图像信息的滞后或失联等情况,飞行器仍存在与地形发生碰撞损毁的隐患。为更好解决此避障问题,本文提出了一种应用于低空多轴固定翼复合构型无人机的机载避障预警系统。
该系统以长测距毫米波雷达作为探测设备,辅以与之相配合的对准随动装置,和对应的装置对准算法,可以准确获取飞行器相对于飞行方向路径上的障碍物距离,而不受飞行器飞行姿态的影响。同时系统的预警-避障算法,将根据获取到的障碍物距离数据与设定的阈值条件进行匹配,执行相应的警示、减速或刹停策略,实现预期效果。
1 避障系统总体设计
1.1 系统框架
避障系统如图1 所示,虚线框体表示内建于飞控中的主要软件组成部分,实线框体表示安装于机体上与飞控存在数据交互的硬件部分。按功能亦可区分为观测部分和决策部分。观测部分中,对准装置与探测装置配合工作,由对准装置根据相应控制算法的指令,控制探测装置朝向飞行速度矢量在水平面投影的方向,而探测装置负责其探测范围内与障碍物的相对距离,从而实现对飞行路径前方障碍物的观测。决策部分主要为一套设定的预警避障控制方案,通过实时根据观测到的障碍物距离,进行报警和干预原飞行动作实现。

图1 避障系统框架
1.2 探测装置选型
对常见的无人机避障装置及其特点进行调研,整理如表1所示[8-11]。对应用场景、成本等进行综合考虑,该系统选取毫米波雷达作为探测仪器。
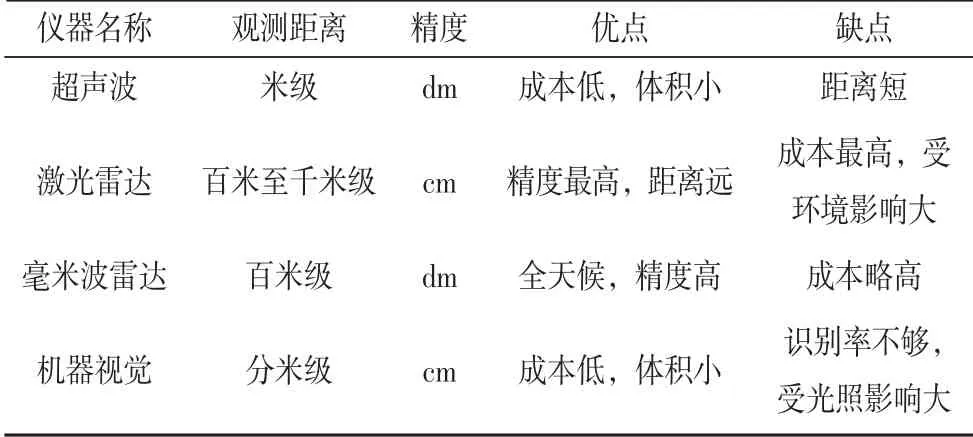
表1 障碍物观测硬件特点
市面上的毫米波雷达产品各有特点,观测距离、波速宽度、更新率等各有千秋,需进行进一步筛选。在该系统所针对的避障场景中,毫米波雷达的测距距离要较远,波束宽度需适中不宜过宽。故选用市面上一款满足需求的毫米波雷达产品,并作定制化调整,其主要参数如表2所示。

表2 选用毫米波雷达参数
1.3 对准装置设计
当飞行器以固定翼方式平飞巡航时,不可避免存在有侧风的场景。在机载飞控系统的控制作用下,飞行器为保持航行方向,会使机头偏向侧风方向,形成侧滑角θ(下文有对侧滑角的数学定义)。对准装置的主要任务是使雷达探测朝向尽可能与飞行器速度方向保持一致。在安全飞行风况下,此偏角的角度绝对值一般不超过30°,极限条件下亦不会超过45°。同时考虑飞行时俯仰横滚存在变化,姿态不长期维持水平的一般性,可采用一组双舵机二自由度机构作为对准装置(图2)。舵机的控制量为脉冲宽度1000~2000 μs 的PWM 波,线性对应0°~180°。安装时使各舵机初始处于1500 μs/90°的物理中位,则控制目标期望角度A与控制量S的线性映射关系为:


图2 系统硬件结构示意及运动学表达
2 系统工作原理
2.1 自动对准装置控制算法
2.1.1 建立坐标系
(1)机体坐标系Cp。原点Op取在飞机质心处,Xp轴指向机头,Yp轴指向机身右方,Zp指向机身下方。
(2)相对位置坐标系Cm。原点Om同取在飞机质心处,Xm轴指向地理北方向,Ym轴指向地理东方向,Zm轴指向地心。
(3)欧拉角E(α,β,γ)表示从Cm到Cp的三维旋转关系。俯仰角α,机体轴与地平面(水平面)之间的夹角,飞机抬头为正;横滚角β,飞机对称面绕机体轴转过的角度,右滚为正;偏航角γ,机体轴在水平面上的投影与地轴之间的夹角,以机头右偏为正。
(4)飞行器速度V(Vx,Vy,Vz)遵循坐标系Cm。
(5)定义侧滑角θ。飞行器飞行速度矢量V与其纵向对称平面(Xp-Zp平面)之间的夹角[12]。
2.1.2 控制目标推导
飞行器速度V可从飞控中获取,为已知量。提取其水平分量设为Vxy(Vx,Vy,0)。考虑实际场景及数学约束,约定以下限制条件。
(1)条件A。飞行器的横滚角绝对值不超过25°,俯仰角绝对值不超过25°:

(2)条件B。飞行器速度的水平分量模长|Vxy|大于设定值Vmin:

限制条件下,根据飞行器水平速度得单位列向量U(Ux,Uy,0):

根据飞行器偏航角得另一单位列向量H:

则侧滑角θ可由U及H求得:

建立右手坐标系Cv,使其Xv轴指向U,Zv轴指向地心,Yz轴指向Zv×Xv方向。从Cv到Cp的旋转可用一组欧拉角Ev(α,β,θ)表示。设对准装置的需偏转弧度为θT,需俯仰弧度为ηT,则探测装置的朝向在机体坐标系下可表示为列向量Tp:

由Ev求旋转矩阵Rv(a1,a2,a3;b1,b2,b3;c1,c2,c3)(下方表达式中用c表示cos,用s表示sin):

则探测装置朝向在Cv坐标系下可表示为列向量Tv(Tvx,Tvy,Tvz):

为使Tv与Xv重合,建立方程:

求出对准装置控制目标:

将(11)所得数值换算成角度,分别代入(1)中,即可得给各舵机的PWM控制量。
2.2 预警避障控制方案
设观测距离为d,定义4个判断阈值e1、e2、e3、e4且需满足:

定义4 个状态等级,在条件A 与条件B 皆为真的前提下,其功能和触发条件如下。
(1)提示预警状态下的功能。向地面站发送1 级预警信息。触发条件为:

(2)减速警示状态下的功能。向地面站发送2 级预警信息,同时将飞行器速度降至固定翼飞行状态下不失速的最低值v1。触发条件为:

(3)预回避状态下的功能。向地面站发送3 级预警信息,同时将飞行器速度降至比更低的速度v2且启动多旋翼部分辅助控制飞行器姿态。触发条件为:

(4)紧急回避状态下的功能。向地面站发送4 级预警信息,将飞行器完全切换至多旋翼部分进行悬停控制。触发条件为:

此4 组应对策略设计为递进式关系,考虑了飞行器相对于障碍物由远及近的过程,且执行方式对过渡的平滑也进行考虑。
3 飞行验证实验
为了验证系统的可靠性有效性,设计了如下避障飞行实验。首先选取实验平台为自研的一台四轴-倒V 尾翼-复合翼构型无人机,长1735 mm、宽4302 mm、高593 mm,其固定翼飞行模式下的安全巡航空速为18~25 m/s。将本文提出的避障系统硬件设备安装于机头下方,软件部分内嵌于飞控代码内部。
同时对避障系统软件部分的相关参数进行设置,设置时需对考虑实验平台(无人机)的巡航空速。结果如表3所示。
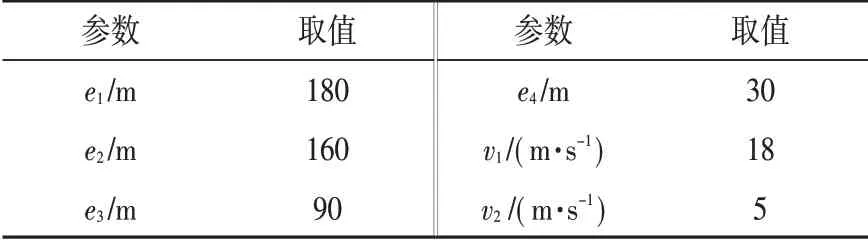
表3 避障控制相关参数设定
然后根据飞行实验场地情况,设计如图3 所示的飞行实验航线,其中箭头图标位置为无人机初始摆放位置,飞行器大致朝向1号点,1号点、2号点、3号点高度皆为50 m。实际障碍物在2号点与3号点之间,2号点与障碍物的距离约250 m。
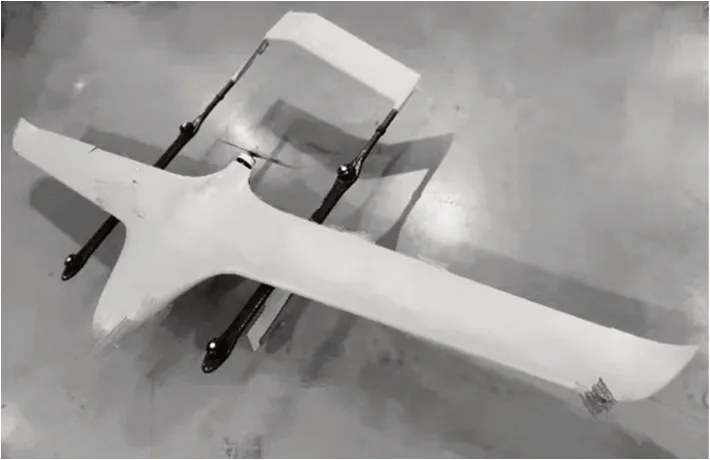
图3 复合翼无人机实验平台
在设计的飞行实验过程中,无人机将以多旋翼方式起飞至50 m,后朝着1 号点加速前飞(尾部电机加速,多旋翼电机与固定翼舵面混合控制)。待巡航空速到达设定值后切换至纯固定翼飞行方式(此时还未到达1 号点),而后按1-2-3 的顺序飞行。预期在避障系统的作用下,无人机将在第2 点到第3 点之间会接连触发4个等级的应对策略,逐步减速并悬停。最后人为控制调转机头并返航至起飞点降落,完成一次飞行实验。
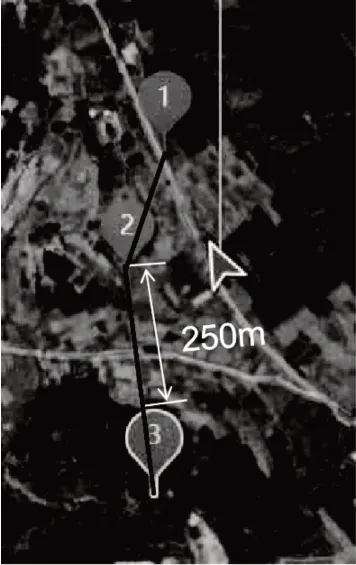
图4 飞行实验航线
实验共进行了6 次,无人机的避障表现皆符合预期,记录数据如表4所示。
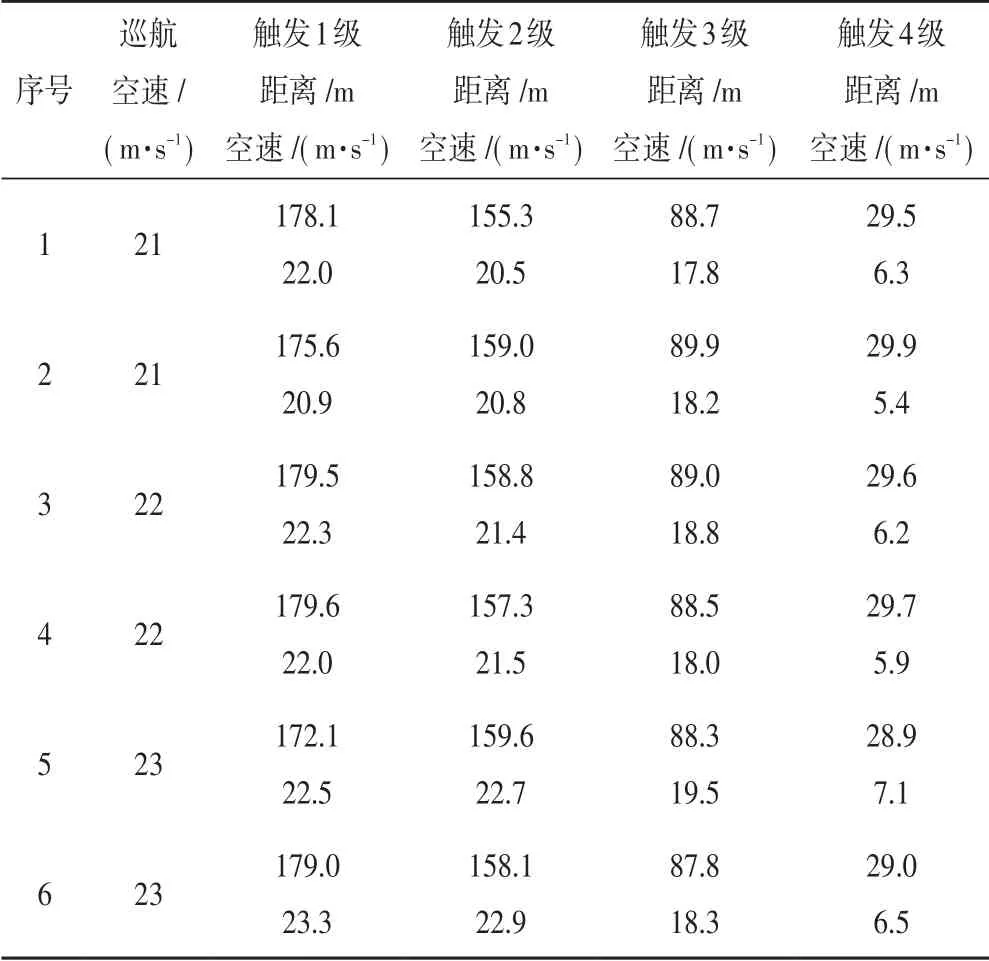
表4 避障实验数据记录
飞行实验航线如图3所示,将飞控中所记录的第1次实验飞行数据进行下载,截取避障关键部分的主要关注数据绘制如图5~6所示,数据帧率为30 Hz。

图5 实验1中观测距离、避障状态及相关速度数据
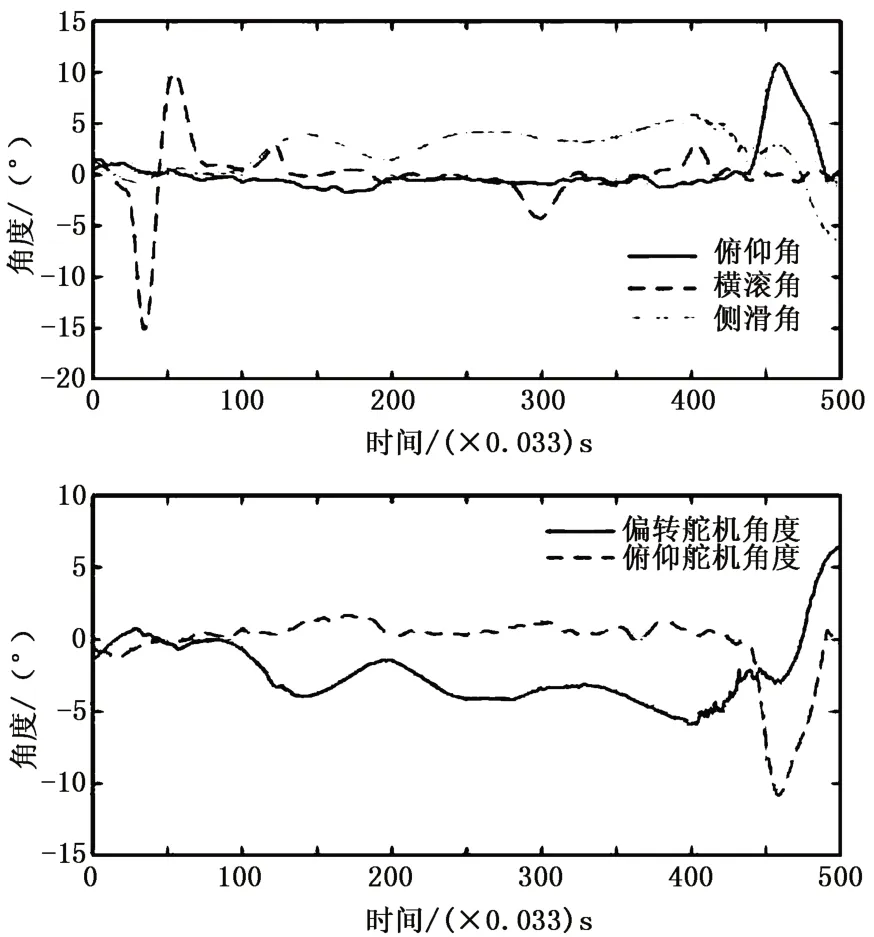
图6 实验1中飞行器姿态角与对准装置舵机目标角
可以看出,对准装置控制目标能准确跟随飞行器的姿态角及侧滑角变化,毫米波雷达可以探测到障碍物距离,预警避障控制方案能正确根据设定参数和障碍物距离,进行风险提示并让飞行器减速或刹停,避免了飞行器与障碍物的相撞。实验验证了该避障系统的有效性。
4 结束语
本文基于毫米波雷达及与之配合的二自由度对准装置,为复合翼无人机设计了一种预警避障系统。该系统的对准装置控制算法,考虑了飞行器飞行过程中姿态角与侧滑角的变化,减少了毫米波雷达的探测方向所受影响,提升了探测数据的有效性。该系统的预警避障控制方案,合理地细分了避障过程,规定了4个状态等级,使报警及避障干预功能具有层级性。
本文对此避障系统的功能效果进行了实验验证,实验数据及结果表明,本文设计的预警避障系统是一种有效的复合翼无人机避障问题解决方案。
猜你喜欢
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
当代陕西(2018年12期)2018-08-04
传媒评论(2017年8期)2017-11-08
中国惯性技术学报(2017年1期)2017-06-09
探测与控制学报(2015年4期)2015-12-15
郑州大学学报(理学版)(2014年4期)2014-03-01
城市道桥与防洪(2014年5期)2014-02-27