无人艇航向控制策略综述
2021-09-29 14:45江汉大学智能制造学院罗志刚钱同惠
电子世界 2021年14期
江汉大学智能制造学院 罗志刚 叶 曦 钱同惠
江汉大学人工智能学院 黄佳慧
随着无人驾驶技术快速发展,无人水面艇近年来受到越来越多国内外专家学者的关注,无人艇在在军事侦察、水域监测和代替人工执行特殊任务等方面有重要应用,因此引起全球各国的普遍重视。无人艇行进中受干扰因素较多,极易受到风、浪、流等外部因素的影响,研究无人艇的航向保持和跟踪问题是目前的重点与难点,是研究无人艇航迹跟踪、自动避障、多艇协同等关键技术问题的基础。本文着重对无人艇航向控制近五年来的研究成果进行分析与归类,总结国内外专家学者在无人艇航向控制方面取得的进展,以及各类研究方法的主要研究成果及其主要特点,并分析其存在的主要问题,最后对无人艇航向控制的未来发展进行了展望。
随着人工智能、信息技术的高速发展,无人驾驶领域的研究已逐步走向成熟,并展现出巨大的应用前景。在无人驾驶领域,主要包括无人机、无人车、无人艇(unmanned surface vessel,USV)等,相较于无人机和无人车,无人艇的研究还处于探索阶段。无人艇作为一种具有自主规划、自主航向能力,并可自主完成环境监测、目标检测及警戒巡逻等作业任务的小型水面平台,具备着小型轻便、隐蔽性好、生存能力强、成本低可集群使用、模块化和无人员伤亡等特点。在无人艇的研发和使用领域中,美国和以色列一直处于领先地位,并且多用于反水雷作战、反潜艇作战、支持海上拦截作战等军事用途。中国USV研究虽起步较晚,但技术进步迅速,业已走向世界前列。2020年,央视公布了共计56艘中国军民两用无人艇组成“鲨群”协同演练的宏大场面,这标志着中国海上无人系统的发展达到了新高度,将在各种常规作战、非常规作战领域得到广泛地应用。
在复杂多变的水域环境中,无人艇在水面运行时,无人艇的运动是非线性的,所受干扰具有不确定性。由此无人艇航向控制技术显得尤为重要,无人艇航向控制最主要是对无人艇舵机进行控制,当实际航向与给定航向发生偏差时,无人艇会根据航向控制器算法反馈舵角指令通过伺服机构控制舵机工作,操作无人艇调整舵角,进而达到控制无人艇航向的目的。控制原理图如图1所示,该系统为双反馈闭环稳定系统,外部的闭环是航向比较环节,通过实际航向与给定航向进行对比得出航向偏差量,进而反馈给航向控制器部分,通过航向控制器算法计算出舵角偏移量,然后传递给伺服机构控制舵角偏移。内部的闭环是舵角比较环节,通过给定实际舵角值与给定舵角值进行比较,通过舵角反馈装置控制伺服机构继续工作,直到实际舵角值与给定舵角值无偏差,此时外部的实际航向与给定航向的偏差量为零,则该无人艇航向控制系统处于平衡状态。
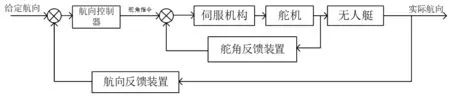
图1 无人艇航向控制系统原理图
由于存在风、浪、流等复杂的环境干扰因素,并且随着航速的变化,系统存在着较强的不确定性和时变性。为了解决无人艇航向偏离的问题,实现无人艇自主性、稳定性的航向控制显得尤为重要。下面对国内外在无人艇航向控制研究现状进行综述和分析。
1 无人艇的航向控制策略
在无人艇的运动控制中,航向控制是该领域的热点,最早关于无人艇航向控制,应用最广泛的是Minorsky提出的PID控制器,但由于单一的PID控制效果较差,无法满足无人艇在复杂环境中的应用需求,因此研究更为智能的无人艇航向控制算法是科技发展的需求。目前无人艇航向控制方法主要包括改进后的PID控制、模糊自适应控制技术以及模糊控制结合神经网络、支持向量机、遗传算法、Lyapunov直接法控制器等多种智能控制技术。并且随着计算机技术的发展,很多改进后的智能算法已经得到推广,并在特定的场景下都发挥着优越的控制效果。
1.1 智能PID航向控制策略
杨俊成等基于改进粒子群控制算法,同时结合PID自适应控制技术,设计和开发了USV的航向稳定性控制系统,提高了无人艇航向控制的稳定性、鲁棒性和精确性。Fan提出了一种模糊自适应PID无人艇航向控制算法,给出了模糊参数调节规则,实现了控制器参数的在线调节和跟踪控制,不足之处是要在复杂度和逼近精度之间进行折中。王亮等为了解决非线性无人艇动力学模型在航向控制时PID控制参数整定的问题,提出了基于非线性模型和遗传算法寻优的无人艇航向PID控制算法,对无人艇操舵平稳,舵角输出未发生振荡有一定改善。詹勇将模糊支持向量机引入到无人艇的航向控制中,针对非线性PID的不足,通过采集无无人艇航行过程中的大量数据进行训练,并且考虑到模糊支持向量机在参数寻优和模型过大方面的缺陷,采用了粒子群算法和权重剪枝算法对其改进,以此提升了系统运行时间和减小模型大小。周健等将RBF(radical basis function)神经网络与PID算法相结合,利用RBF神经网络的自学习能力实现对PID控制器参数的整定,结果表明基于RBF-PID算法的无人艇航向控制器的超调量为零、稳态时间最短,同时能够及时有效地纠正随机扰动的影响,保障无人艇的航向稳定性。仲伟波等针对双向驱动无人艇的航向控制,对比分析了单航向PID控制方法和航向、转向速度双PID控制方法,结果表明航向、转向角速度双PID控制方法在双桨驱动无人艇运动控制中具有良好的可靠性和稳定性。赵东明等针对常规PID控制器在无人艇航向控制系统中表现出抗干扰能力弱、控制精度低等问题,提出了一种应用模糊神经网络算法的航向控制器设计方法,改善了航向控制的控制精度和鲁棒性,提高了无人艇在复杂环境中的适应能力。谭西都针对PID航向控制器存在的不足,提出了基于航速与抛筒状态变化的自整定PD控制器和基于角速度闭环的自整定PID控制器,结合两者的优势融合出一种综合航向控制器。张金越研究实现了无人艇变论域模糊自整定PID航向控制算法,对传统PID航向控制算法、模糊自整定PID航向控制算法和变论域模糊自整定PID航向控制算法进行比较,结果表明变论域自整定PID航向控制算法较其它两种控制算法的航向控制性能最佳。
1.2 非线性优化航向控制策略
李小毛等提出了一种基于常增益滤波器的无人艇航向角滤波处理方法,解决了滤波中过程噪声估计、运动建模和航向角边界不连续的问题,使得航向角抖动严重难以控制的问题得到改善。白一鸣等针对无人艇航行中的动态环境特征,提出了一种基于动态面控制技术的高效控制算法,引入动态面控制技术来解决控制系统的非线性特性,以确保系统的全局稳定性,达到精确的航向控制效果。龚波等设计了一种基于P系统的航线非线性控制器,并在P系统的基础上设计了粒子群优化细胞型膜算法,避免粒子群算法容易陷入局部最优的问题,该方法较之传统PID控制方法具有抗干扰能力强、响应速度快、超调量小的特点。左旋针对线性Nomoto船舶运动模型,运用动态矩阵控制(Dynamic Matrix Control,DMC)来实现无人艇航向的控制,动态矩阵控制较之传统PID超调少,控制具有更好的鲁棒性。胡俊祥等引入了线性自抗扰控制,比较得出线性自抗扰控制器比传统的自抗扰控制器,系统需要整定的参数大大减少,且系统的动态性能与静态性能几乎一致。温景松针对风、浪、流干扰导致航向控制精度下降的问题,提出无人艇航向控制系统中引入自抗扰(ADRC)控制,自抗扰控制器较PID控制器在航向保持方面具有较强的稳定性,航向变更超调量较小。陈丽丽等针对航向控制过程中存在的网络时延以及数据丢包等网络影响导致航向控制系统稳定性降低,提出了一种无人艇航向控制准则,采用Lyapunov稳定性原理和凸分析方法,对能使网络环境下基于观测器的无人水面艇航向控制系统渐进稳定的控制准则进行推导,实验结果表明所提出方法以及设计的控制器、观测器具有较好的性能。包涛基于改进了趋化、游动和迁徙操作的细菌觅食算法和广义动态模糊神经网络并结合无人艇参考模型设计了一种鲁棒自适应模糊神经网络控制器用于无人艇的航向控制,之后使用Lyapunov稳定性理论证明了控制器的稳定性。Kim将遗传算法引入到航向控制中,利用遗传算法优化有环境干扰情况下无人艇的航向控制问题,包括到达目标点和最小化航向时间。
滑模控制具有较强的鲁棒性,对于经典的滑模控制而言,ZAK.M提出了终端吸引子的概念,MAN.Z.H在此基础上发展出终端滑模控制方法。Edoardo采用非线性比例导数的反推滑模反馈控制器来控制无人艇的航向问题,然而仅仅考虑到了风对无人艇的影响,忽略了浪和流对无人艇航向控制的影响伊戈等出了一种改进的终端滑模控制方法,解决了传统滑模控制状态跟踪误差不会在有限时间内收敛为零的问题,并且具备更好的鲁棒性。张晨等针对传统滑模控制方法和传统滑模趋近律在喷水推进型水面无人艇的航线控制中存在收敛速度慢、耗时长和抖振严重等缺点,提出了一种基于新型幂次趋近律的终端滑膜控制方法,结合终端滑模控制理论和新型趋近律的思想设计了新型Terminal滑模控制器,仿真结果表明,设计的新控制器与传统幂次趋近律、指数趋近律相比,具有更快的收敛速度和更好地运动品质。武颖等针对欠驱动水面无人艇航向运动提出了一种优化的反演滑模控制方法,提高无人艇航向控制系统的稳定性。慕东东等提出了一种具有较快收敛速度的快速非奇异终端滑膜(Fast Non Singular Terminal Sliding Mode,FNTSM)航向保持策略,达到了在干扰较小的情况下有着较快的收敛速度和较强的鲁棒性。于乐等围绕前驱动运动系统的航向控制展开研究,分别基于反步法和反步自适应滑膜设计航向控制器,分析表明后者具有航向追踪能力快、且合力矩幅度变化小,能耗小。
2 结语
在无人水面艇航向控制方面,单一的控制技术难以适用于复杂的水域环境,将多种智能控制技术和智能算法融合起来设计的无人艇航向控制器才能保证在不同的场景下都发挥着优越的控制效果,这也是未来无人艇航向控制研究的发展方向。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
民用飞机设计与研究(2019年4期)2019-05-21
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
制造技术与机床(2017年6期)2018-01-19
电子制作(2017年24期)2017-02-02
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01