
双重积分器的二阶线性自抗扰控制:快速无超调阶跃响应
2021-10-10 08:42金辉宇兰维瑶
控制理论与应用 2021年9期
金辉宇,兰维瑶
(厦门大学航空航天学院,福建厦门 361102)
1 引言
双重积分器是一类重要的被控对象.它可以描述航天器的单轴转动[1–2],也常在多智能体控制的研究中作为动力学模型[3–5].双重积分器不易控制,比例–微分(proportional-derivative,PD)和比例–积分–微分(proportional-integral-derivative,PID)控制都难以实现其快速无超调阶跃响应[6].因此,双重积分器常被用于不同控制方法的检验和比较[7],并在控制理论教学中发挥重要作用[2,8].
本文研究双重积分器的自抗扰控制(active disturbance rejection control,ADRC).ADRC是韩京清研究员提出的一种通用控制方法[9–11].类似于PID控制,ADRC既能依据对象的数学模型设计参数,也能不依赖模型直接整定参数.由于这一特点,ADRC受到一线工程师们的欢迎,被广泛应用于化工、冶金、电力、机电、汽车、航空航天等领域[12–15],并被控制理论工作者们高度关注[16–24].
ADRC与双重积分器具有紧密的内在联系.ADRC的一个基本想法是把对象看作受扰的双重积分器.此处的扰动被称为“总扰动”,是对象和双重积分器间的全部动态差异,既包括外扰,也包括未知参数和未建模动态导致的“内扰”.ADRC建立扩张状态观测器(extended state observer,ESO)估计总扰动,并用反馈兑消,从而将不确定对象的控制问题简化为控制双重积分器.这一方法能有效处理各种内扰.但有趣的是,当内扰不存在时,上述方法是否有效却鲜有研究.例如,在近期的稳定性研究[25]中,就避开了双重积分器的情况.
本文用线性ADRC(linear ADRC,LADRC)[26]控制双重积分器.发现如果采用文献[27–28]建议的单参数结构,则可以任意设置回路传递函数的增益穿越频率,而保持相位裕度恒为31.9°.此时回路传递函数具有文献[2,29]建议的理想特性,而阶跃响应无超调.也就是说,在控制双重积分器时,LADRC可以实现快速无超调的阶跃响应,优于PD和PID控制.分析和算例还表明,二阶LADRC的抗低频外扰能力类似PID控制,能抑制低频外扰并完全抵消直流扰动,优于PD控制;而抗高频内扰能力则优于PD和PID控制.
2 双重积分器的二阶LADRC
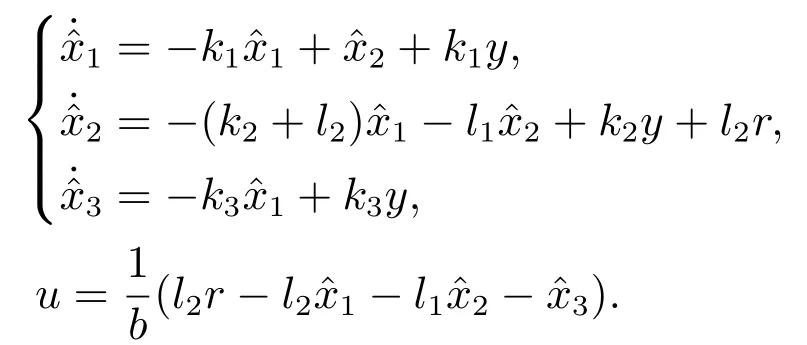
考虑双重积分器

其中:u,y和w分别是输入、输出和外扰信号,参数b>0精确已知,即系统不存在内扰.要求设计输出反馈控制器,保证y能跟踪参考输入r且具有满意的性能.
引入状态变量x1y,x2˙y,以及扩张状态x3w,则对象(1)可以重写为

然后为式(2)–(3)设计ESO

其中k1,k2,k3是待调参数,称作ESO增益.令l1和l2是另外两个待调参数,称作反馈增益.设计控制器

ESO(4)和控制器(5)就组成了LADRC,加上对象(1)构成整个LADRC系统.
本文采用文献[27–28]建议的单参数结构.它引入一个正参数ωo,称为“观测器带宽”,并根据式(6)–(7)生成l1,l2和k1,k2,k3,


3 主要结果
3.1 传递函数框图
将式(5)代入式(4),有
设U(s),Y(s)和R(s)分别是信号u,y和r的拉式变换,则有传递函数

利用式(6)–(7),并令

再考虑到对象有传递函数

则整个二阶LADRC系统有图1所示的框图.

图1 LADRC系统的框图Fig.1 Block diagram of the LADRC system
3.2 快速无超调阶跃响应
由于前置滤波器C1(s)的存在,二阶LADRC系统可以实现无超调的阶跃响应.
定理1如果外扰w0且

则对任意ωo>0,二阶LADRC系统阶跃响应无超调.
证从R(s)到Y(s)的传递函数为

代入式(8)–(9)后有

于是单位阶跃响应为

其中L−1是Laplace逆变换.计算可得

于是单调上升无超调.再由LADRC系统的线性特性,所有阶跃响应都无超调. 证毕.
在上述证明中,未约定ωo的取值范围.而由式(13)可知,ωo越大则阶跃响应越快.于是,选择足够大的ωo就能实现双重积分器的快速无超调阶跃响应.
注1由于重极点的存在,式(11)–(12)不满足时如何用本文方法保证无超调仍需进一步的研究.
注2定理1假设下,ESO的误差恒为0.令i1,2,3.由式(2)(4)和w0,

3.3 频域特性
单参数二阶LADRC用于双重积分器后,频域性质也优良.现考虑图1中的回路传递函数


图2 L(s)的Bode图Fig.2 Bode diagram of L(s)
定理2对任意ωo>0,L(s)有增益穿越频率ωgcωo和相位裕度31.9°.
证由图2知L(s)有唯一的增益穿越频率ωgc.而计算可知|L(jωo)|1,于是ωgcωo.再计算得
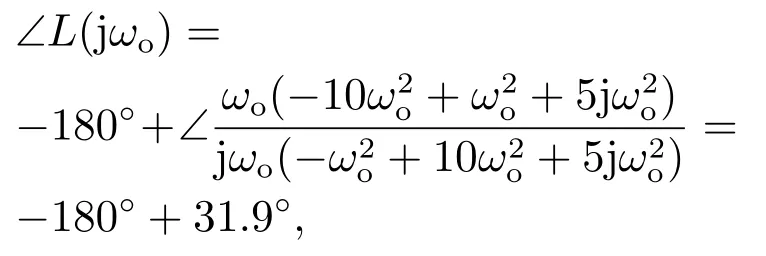
于是相位裕度31.9°. 证毕.
定理2是一个非常有趣的性质.它表明,使用单参数整定式(6)–(7)可以任意设置L(s)的增益穿越频率,同时却保持相位裕度不变.其他频域设计方法尚未有类似性质的报道.
相位裕度31.9°在单位负反馈中不能保证阶跃响应无超调.二阶LADRC能实现无超调阶跃响应,有赖于C1(s)的前置滤波作用,这一点可以从频域理解.先作C1(s)的Bode图如图3中红线.从中可以看出,幅频特性曲线在ωωo附近有一个凹陷,能削弱这一段频率的信号.再作的Bode图如图3中蓝线.其中幅频特性曲线存在一个峰,因此如果C(s)单独用作单位负反馈控制器,系统的阶跃响应将存在超调.再作C1(s)的Bode图如图3中黑线.由于C1(s)的滤波作用,幅频特性曲线的峰消失了,于是阶跃响应无超调.
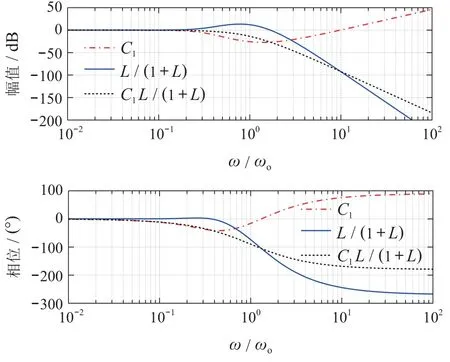
图3 C1(s)的Bode图Fig.3 Bode diagram of C1(s),
注3回路传递函数L(s)有增益裕度±11.6 dB.
注4双重积分器的无超调快速阶跃响应可以用文献[30]的全阶观测器法或者文献[31]的直接二自由度设计实现.但这两种方法都未产生类似式(14)的理想回路传递函数.
4 算例与比较
本节通过数值算例说明二阶LADRC在控制双重积分器时的优越性,并与PD,PID控制进行比较.
4.1 无扰动情况
例1设有双重积分器

采用ESO(4)和反馈控制(5),且有

令ωo分别取1,3,10,然后按式(6)–(7)生成参数,再分别用MATLAB进行数值仿真,计算单位阶跃响应,结果如图4所示.从图中可以看出,3种情况都没有发生超调.而随着ωo的增大,响应越来越快.

图4 双重积分器的无超调阶跃响应Fig.4 Nonovershooting step response of the double integrator
下面将二阶LADRC与PD和PID控制进行比较.
例2控制器取

采用图5的单位负反馈结构.回路传递函数KPD(s)P(s)和KPID(s)P(s)的Bode图如图2中黑线和红色点划线所示.由图和计算可知,两者都有增益穿越频率ω3,同时分别有相位裕度84.3°和71.1°.

图5 单位负反馈的PD或PID控制Fig.5 Unity feedback PD or PID control
计算上述PD和PID控制的单位阶跃响应,结果如图6所示.从图中可以看出,两个控制器都产生了超调,尽管其相位裕度明显大于ωo3的二阶LADRC.这一结果与文献[6]的断言一致.

图6 PD和PID控制的阶跃响应Fig.6 Step response of PD and PID control
4.2 低频外扰和高频内扰的影响
前面的研究中假设内外扰均为0.但实际控制系统中,负载或环境因素的波动会导致低频外扰,对象高频段的未建模动态又会构成高频内扰.这两个因素会限制二阶LADRC中参数ωo的取值范围.
图1中,从外扰w到输出y有传递函数

将式(8)和式(10)代入并令

则有

在ω ≈0的低频段,有

于是幅频特性曲线以20 dB/十倍频的速率上升,低频外扰被抑制.特别地,由于

直流外扰将被完全抵消.ωo3时Gyw(s)的Bode图如图7中蓝线所示.

图7 传递函数Gyw(s)的Bode图Fig.7 The Bode diagram of transfer function Gyw(s)
另一方面,由图3和计算可知,在ω >的高频段,C(s)P(s)的幅频特性曲线以大约−60 dB/十倍频的速率衰减,形成所谓“高频滚降(high-frequency roll-off)”.有利于抑制高频内扰.后面将用一个算例说明这一点.
综上所述,有低频外扰或高频内扰存在时,ωo的选择要考虑抗扰的需要.较大的ωo有利于抗低频外扰,而较小的ωo有利于高频内扰.如果内、外扰同时存在,则应统筹兼顾.
用式(16)–(17)替换式(18)中的C(s),可以分析PD和PID控制的抗低频外扰能力.其Bode图分别如图7中黑线和红点划线所示.可以看出,PID控制的抗低频外扰能力类似LADRC,能完全抵消直流外扰.PD控制则没有上述能力.而由图3,由于微分作用,PD和PID控制在高频段都以大约−20 dB/十倍频的速率衰减,不存在高频滚降,抑制高频内扰的能力不如二阶LADRC.
下面的算例比较3种控制方法的在内、外扰均存在时的控制能力.
例3设对象P为

其中外扰w是幅值0.1的直流信号.易知从u到y有传递函数

其Bode图如图8中绿线所示,幅频特性在ω40处有一个谐振峰.

图8 C(s)P(s),KPD(s)P(s)和KPID(s)P(s)的Bode图Fig.8 Bode diagram of C(s)P(s), KPD(s)P(s) and KPID(s)P(s)
假设由于经济和工期的原因,在ω >10的频段未建模,该对象被当做双重积分器(15).现分别使用ω3的单参数二阶LADRC、PD控制(16)和PID控制(17).
先比较回路传递函数C(s)P(s),KPD(s)P(s)和KPID(s)P(s)的Bode图,分别如图8中蓝线、黑线和红点划线所示.从图中可以看出,3种方法都将回路的增益穿越频率提高到了ω3附近,作为代价,ω40处的谐振峰都被抬升.PD和PID控制的谐振峰接近0 dB,而由于高频滚降的作用,二阶LADRC的谐振峰要低得多.
其次计算3者的单位阶跃响应.Matlab仿真结果如图9所示.从图中可以看出,二阶LADRC的输出和内、外扰都不存在的情况接近,表现了良好的抗扰能力.而PD和PID控制的暂态响应中都存在明显的高频分量,这和其谐振峰接近0 dB的事实一致,表明抗高频内扰能力不如LADRC.PD控制还出现了稳态误差,这是外扰的结果,表明PD控制不能完全抵消直流外扰,抗低频外扰不如二阶LADRC和PID控制.

图9 二阶LADRC、PD和PID控制的单位阶跃响应Fig.9 Unity step responses of second-order LADRC,PD and PID control
5 结论
本文发现用二阶LADRC控制双重积分器,在时域可以实现快速无超调阶跃响应,在频域可以实现理想的回路传递函数,任意配置增益穿越频率并有恒定相位裕度31.9°,还具有良好的抗低频外扰和高频内扰能力.表明在控制双重积分器时,LADRC优于PD和PID控制.这一结果有利于进一步深入理解LADRC的机理,发展出新的参数整定方法,为LADRC的更广泛应用提供指导.
猜你喜欢
农业工程学报(2022年13期)2022-10-09
电气电子教学学报(2022年3期)2022-07-30
灌溉排水学报(2022年6期)2022-07-13
宁夏电力(2022年1期)2022-04-29
中国舰船研究(2022年1期)2022-03-19
中国科技纵横(2021年22期)2022-01-08
汽车维修与保养(2021年11期)2021-03-11
科学导报·科学工程与电力(2019年22期)2019-10-21
演艺科技(2017年1期)2017-03-09
中文信息(2016年7期)2016-05-14
