基于机器人摇杆齿轮式的设计与平衡探讨
2021-10-12 11:05徐滨
红河学院学报 2021年5期
徐 滨
(合肥职业技术学院,合肥 238000)
煤炭开采过程中,矿难惨剧难免发生,因此需要移动机器人进行登陆探测与救援工作[1]。为解决复杂地形的高效率勘探问题,机器人的行走与平衡机构成为现阶段的研究热点[2]。高进可等[3]人利用圆锥齿轮啮合型差动机构实现了摇杆式四轮煤矿探测机器人的复杂地形勘探,并通过虚拟仿真技术进行样机的实地试验。然而,差动平衡机构对于齿轮的弯曲强度的要求较高,否则会出现齿轮滚动,机器人行走不均衡的情况。程志红等[4]人提出一种对称的空间连杆式差动平衡机构,具有较大的摇臂摆角范围和良好的线平均性,能够很好解决机器人行走的不均衡问题。本文以四轮摇杆式机器人为主体设计了摇杆齿轮式差动平衡机构,着重分析了差动轮系、摇臂轴、壳体的选择依据,为摇杆齿轮式机器人的实际应用提供参考依据。
一 机器人摇杆齿轮式差动平衡机构总体设计
(一)总体设计要求
本设计为机器人摇杆齿轮式差动平衡机构,如图1所示,主要参照四轮摇杆式机器人移动系统中的平衡机构进行设计,包含了机器人摇杆差动机构、车体两侧摇杆悬架和独立驱动轮四个部分。其中,机器人摇杆差动平衡机构装置的左右两半轴连接车体两侧的左右摇杆,左右摇杆悬架再与车体的四个驱动轮连接。同时,左右两侧移动系统采用摇臂悬架式共同组成悬架系统,能应对复杂的地形。此外,为了确保机器人能够顺利地越过障碍,行走在不平的路面上,这就要求机器人的底盘距地面要有一定的距离。
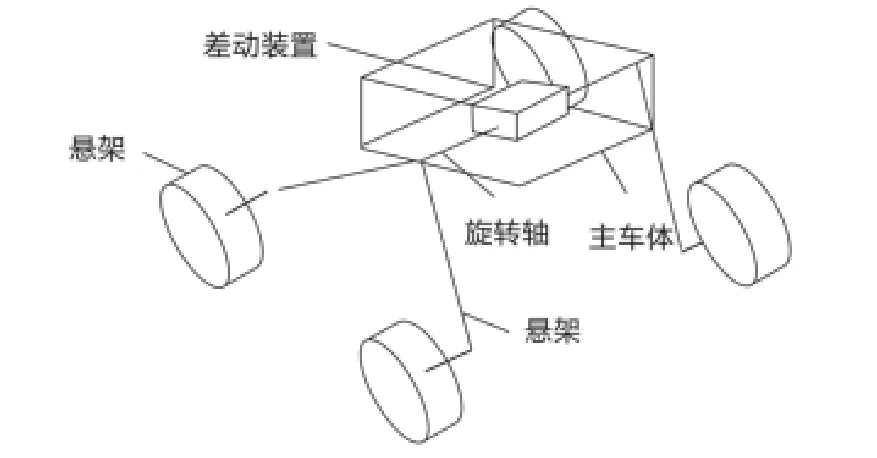
图1 摇杆式四轮机器人的移动系统简图
(二)平衡机构总体设计方案
机器人摇杆齿轮式差动平衡机构的差动机构形式采用对称式行星锥齿轮差速机构。这种差速机构通常被应用在汽车驱动桥上,是一种典型的差速机构。对称式行星锥齿轮差速机构的差动轮系由左右两侧中心锥齿轮和中间若干行星锥齿轮组成,通常行星锥齿轮数选取2或4个[5]。差速器壳体转角()和左右两侧摇杆转角关系:

图2 机器人摇杆差动平衡机构原理图
为了便于后期维护、保养,将机器人摇杆齿轮式差动平衡机构装置要被设计相对独立的部件。机器人摇杆齿轮式差动平衡机构的壳体或底座连接机器人的载物平台和主体,该装置的两侧半轴可视为摇臂轴,用连接部件连接着左右两摇杆悬架。平衡装置的壳体设计采用中空机构。壳体的空间大小要求,能够容下差动轮系,还要保证差动轮系在工作的时候,不受壳体干扰。综上所述,机器人摇杆齿轮式差动平衡机构的总体设计,如图3所示。

图3 机器人摇杆齿轮式差动平衡机构总体设计模型
二 平衡机构设计方案分析
(一)平衡机构差动轮系设计
1.平衡机构的齿轮参数选择
行星齿轮数n:取值大小依据于差动平衡装置的承载能力。对于车类来说,轿车n取值为2,货车和越野车等承载能力大的,n取值为4[5],考虑四轮摇杆机器人工作情况,负载能力不是特别大,所以行星齿轮数n的取值为:n=2。
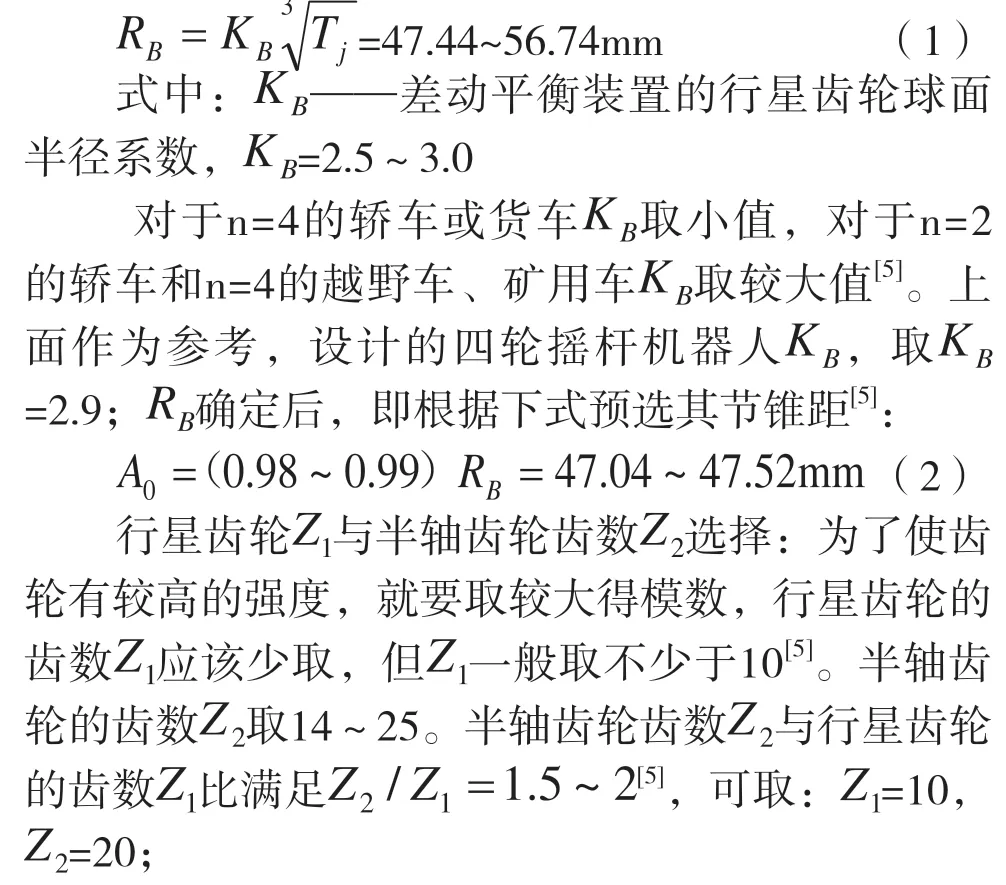
对于任何对称圆锥行星齿轮式差速器中,为了使两个或四个行星齿轮与左、右两半轴齿轮啮合,这就要求两半轴齿轮齿数和必须被行星齿轮轮数整除,达不到这一个条件行星齿轮和半轴齿轮就不能装配。设左半轴齿轮数,右半轴齿轮数,满足公式[5]:


2.平衡机构圆锥齿轮的齿轮强度计算
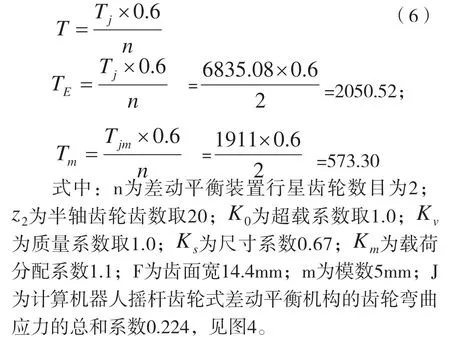
差动平衡装置的齿轮需要进行弯曲强度计算,而齿轮的疲劳寿命可以不用考虑,主要原因器人摇杆差动平衡装置的行星齿轮在正常运转中只作为等臂推力杆使用,当左摇杆悬架转的角速度与右悬架速度不一样,则差动平衡装置半轴中心锥齿轮和行星锥齿轮才会产生滚动。机器人摇杆齿轮式差动平衡机构齿轮的弯曲应力为[6]:

式中:T表示差动平衡装置的行星齿轮对半轴齿轮的转矩大小,其单位为:
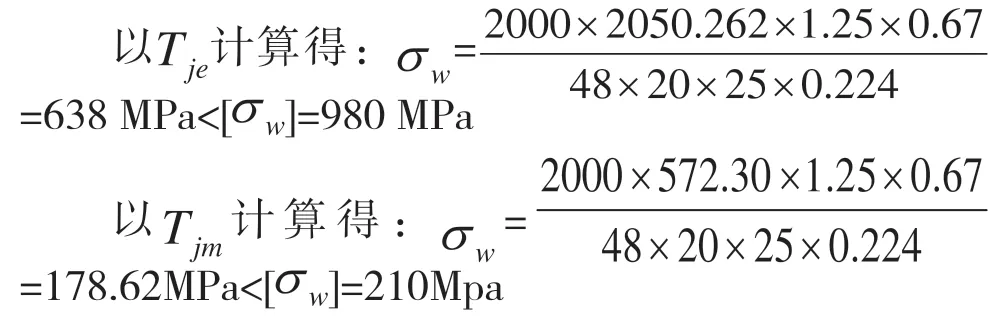
所以所述机器人摇杆差动平衡机构的齿轮强度满足要求。
(二)全浮式摇臂轴的设计
借鉴汽车驱动桥的半轴设计机器人摇杆齿轮式差动平衡机构的摇臂轴系。如图5(a)、(b)是摇臂轴的非浮式和浮式结构。通过比较可以发现:在图5(b)中一个轴套被加在摇臂轴上摇臂轴,添加的轴套可以和摇臂轴共同旋转,底座支承形式是通过轴承连接轴套,区别图5(a)直接作用在摇臂轴上。从设计原理上,图5(b)弯矩不会在中心摇臂轴上产生。但是在实际中,加工工艺、部件装配的精度、支撑做的刚度等影响,会产生弯矩,弯矩应为5~70MPa[3]。在四轮摇杆式机器人差动平衡机构中采用浮式摇臂轴。若采取这种结构,对设计的差动平衡机构的半轴有不少优点,第一中心摇臂轴受到弯矩减小,进而弯矩变形也会明显变轻,最终确保传动系统存在适当的间隙,机构运动的灵活性得到保证。在设计时若传动部件受到弯曲变形过大,会对机构的特性产生不好的干扰,情形严重的会使机构卡死,造成机器故障。第二,中心摇臂轴受力简单,只会受到扭转应力。在设计时设计者会根据实际情况把所许用应力改高,从而使中心摇臂轴(半轴)的半径变小。第三,差动平衡装置的半轴(中心摇臂轴)上不会安装过多的零件,结构简单,工作安全可靠。第四,套轴部分只受弯矩作用而不会受到扭矩作用,轴套不会扭转而形变,轴套又与半轴连接,造成半轴不会受到扭矩。采用浮式摇臂轴的结构的不足之处是摇臂轴侧与底座支承部分的结构不简单,安装时候不方便。比较优缺点,浮式摇臂轴的设计采用优点大于缺点。
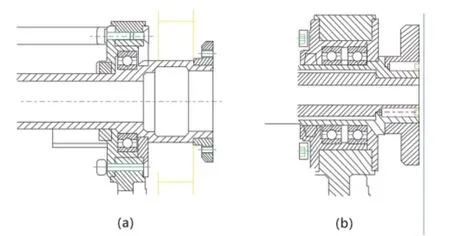
图5 非浮式和全浮氏摇臂轴连接
(三)平衡机构底座及壳体的设计
支承座架是机器人摇杆差动平衡装置中主体部件之一,它要承受整个机器人主体的重力,并要向机器人摇杆差动平衡机构传递对应扭矩和弯矩。考虑底座的受力情况,底座可用LC4铝合金作为材料。此材料常常用在承载力大的零件,所以用在四轮机器人摇杆齿轮式差动平衡装置的底座和壳体是满足条件的。四轮摇杆式机器人的摇杆差动平衡机构的支承底座的结构设计时,应该包括以下几个主要的部分:一是应该包含载物平台;二是主车体的中心部分及差动平衡装置的底座中间部分安装一个壳体,壳体是为装中心锥齿轮和行星齿轮而存在的,及为该平衡装置的差动锥齿轮系提供正常的工作空间,相当于行星架;三是底座两侧服务于摇臂轴两个侧支承,它们相对底座中心点对称;这一组测支撑作用向左摇杆右摇杆传递载荷。以上三部分为该设计的底座及壳体。同时,把底座及壳体结构设计为组合式结构。又因功能不同,把底座和壳体分开来设计,最终再把两者组装起来。
三 结论
本文参照传统的汽车对称式齿轮差动平衡装置的设计方法,确定了四轮机器人的摇杆齿轮式差动平衡机构的总体设计方案,主体采用对称式圆锥行星齿轮差动平衡装置和摇臂轴采用全浮式摇臂轴结构。该设计的差动平衡装置的支撑座设计为底座和壳体两大部分,差动平衡装置的结构合理,机器人摇杆齿轮式差动平衡机构的部件设计满足零件的互换性,满足机器人移动系统受外部环境需要。
猜你喜欢
橡塑技术与装备(2022年6期)2022-06-02
汽车实用技术(2022年9期)2022-05-20
一重技术(2021年5期)2022-01-18
——对2018年广州市一道中考题的研究
中学数学研究(广东)(2021年6期)2021-04-20
南方农机(2021年3期)2021-02-07
湖北农机化(2020年17期)2020-11-02
数码世界(2017年12期)2017-12-28
军民两用技术与产品(2017年13期)2017-12-18
汽车之友(2017年18期)2017-10-31
军民两用技术与产品(2017年11期)2017-08-16