
船舶柴油机调速器有限转角力矩电机优化控制
2021-10-12 01:57谭慧萍周探洲王宇松
船电技术 2021年9期
周 力,唐 庆,谭慧萍,周探洲,王 欣,王宇松,陈 辉
应用研究
船舶柴油机调速器有限转角力矩电机优化控制
周 力1,唐 庆1,谭慧萍2,周探洲1,王 欣1,王宇松3,陈 辉3
(1.中国航发贵州红林航空动力控制科技有限公司,贵阳 550000;2.空军装备部驻贵阳地区第二军事代表室,贵阳 550000;3.武汉理工大学高性能船舶技术教育部重点实验室,武汉 430063)
本文针对新型的船舶柴油机调速器有限转角力矩电机控制系统优化与稳定性问题,在Matlab/Simulink中基于电枢回路方程与力矩方程搭建有限转角力矩电机动态系统模型。通过数据拟合方法构建电机非线性模型,基于线性控制理论对串级PID控制系统进行稳定性分析,最后使用遗传算法对PID参数进行优化设计。研究成果可为该电机用于柴油机电子调速执行机构提供优化及控制参考。
有限转角力矩电机 串级PID控制 非线性模型 调速器执行机构
0 引言

本文以一种新型的船舶柴油机调速执行机构有限转角力矩电机为研究对象,分析了其运行机理,基于实际数据使用Matlab/Simulink软件建立了有限转角电机的控制系统仿真模型。对电机控制系统进行了稳定性分析,并对控制系统的参数进行了优化设计。
1 有限转角力矩电机
电机结构简图如图1所示,基本结构参数如表1所示。有限转角力矩电机组件主要由旋转变压器转子(1)、旋转变压器定子(2)、球轴承(3)、前圆盘壳体(4)、爪极法兰盘(5)、圆柱形磁轭(6)、圆环形永磁体(7)、电枢绕组(8)、电枢绕组法兰盘(9)、后圆盘壳体(10)、角轴承(11)、角轴承保护套(12)、转轴伺服阀门(13)、伺服活门座(14)和预紧弹簧(15)组成,它们串联装配在转轴伺服阀门(13)之上。电机的基本结构参数如表1、表2所示。

图1 有限转角电机结构简图
进行频域响应分析所采用的数据均来自于电机实测数据。具体如下所示:
1)反电动势:15.7 V/krpm
2)电机效率:不小于80%
3)黏性阻尼系数:3.6e-3 Nm/rpm
4)电磁转距:0.1 Nm/A
5)电机时间常数:7 ms
6)电机角速度:16.7 rad/s
7)电机总的堵转转距:1.5 Nm
8)控制器动态响应:上升时间160 ms、延迟时间15 ms、调整时间85 ms;

表2 电机材料属性
2 电机控制系统建模
2.1 电机线性系统模型
伺服系统的执行元件为有限转角力矩电机,有限转角力矩电机的数学模型与调速电动机无本质区别,假定气隙磁通恒定,则直流伺服电动机的电学方程和运动学方程为:
电枢回路方程:

力矩平衡方程:
电磁转矩方程:

反电动势方程:
对式(1)、(2)做Laplace变换,得出关系
电压平衡方程:

力平衡方程:


建立出电机本体的线性系统模型如图2所示。
图2 电机本体模型
2.2 电机非线性特性分析
电机的非线性特性主要体现在刚度扭矩(stiffness torque)与转角(shaft deflection)的关系,表示为:


式(9)的非线性特性如图3所示:
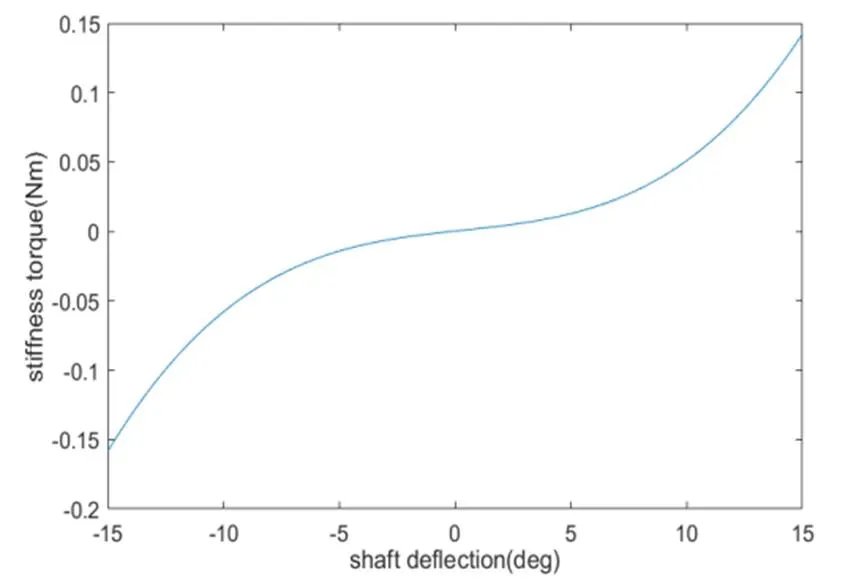
图3 非线性特性拟合

2.3 串级PID控制器设计
串级控制是多个控制回路的相互作用,串级控制利用主回路的输出值来操作副回路的设定点。在串级控制里,主副回路都是闭环的。为了适当的操作,副回路必须比主回路响应速度快。所以内环的带宽必须大于外环。
具体的控制器采用离散PID串级三闭环控制,三环PID控制分别为角度(位置)控制环,速度控制环,电流控制环。其中速度环的输入为位置环的输出,电流环的输入为角度环的输出。具体控制框图4所示:

图4 三闭环串级控制框图
图中APR是位置调节器,ASR是转速调节器,ACR是电流调节器,BQ是光电传感器,DSP是数字转速信号形成环节。依据从内环到外环的原则,首先对电流环进行分析与设计:
电流控制器的主要作用不仅是电流环快速的跟踪电流给定信号和防止电流过大烧坏电机情况的发生,还得确保电流环稳定的运行,其中跟随电流给定信号的要求主要有快速性、超调量和稳定性等指标。
考虑到电流采样和滤波电路对电流环的影响,电流采样和滤波环节可以视为一节惯性环节。

工程中电流控制器一般选用PI控制器,其传递函数表示式为:


从图2电机本体模型中可以看到,电机反电动势的存在会与电流环的电流反馈相互作用,这将给设计工作带来困难。在一般情况下,系统的电气时间常数远小于机械时间常数,电机转速的变化往往比电流变化慢很多。对于电流环来说,反电动势可视作变化较慢的扰动,在电流瞬变的过程,可以考虑反电动势基本不变。
首先对电流环进行频域分析,控制框图如图5所示:

图5 电流环控制框图
电流环开环传递函数经过整理为:

电流环的控制对象是两个时间常数大小相差较大的双惯性型系统,用PI控制器消除控制对象中较大的时间常数极点,并将其校正为I型系统,令


工程中通常对电流环高阶系统进行降阶近似处理,忽略高次项,将其校正为I型系统,等效后的电流闭环传递函数为式(16)所示:
然后对速度环进行设计。速度环对永磁同步电机整个位置伺服控制系统的影响主要体现在电机的响应速度和运动时间。工程上ASR一般采用PI调节器并把速度环设计成Ⅱ型系统。
速度环的控制结构框图如图6所示:

图6 速度环的控制结构框图
速度控制器的传递函数表达式为:

速度环开环传递函数表达式为:
速度环开环传递函数的表达式为:

闭环传递函数表达式为:
最后对位置环进行分析与设计。位置环是电机位置伺服控制系统的最外环,也是保证达到最后的跟踪精度指标的重要环节。与其他环节类似,位置环控制器通常采用PI 控制器,工程上有时为了参数整定方便也常使用P 控制器。其控制结构框图如图7:

图7 位置环控制结构框图
3 电机驱动系统组成
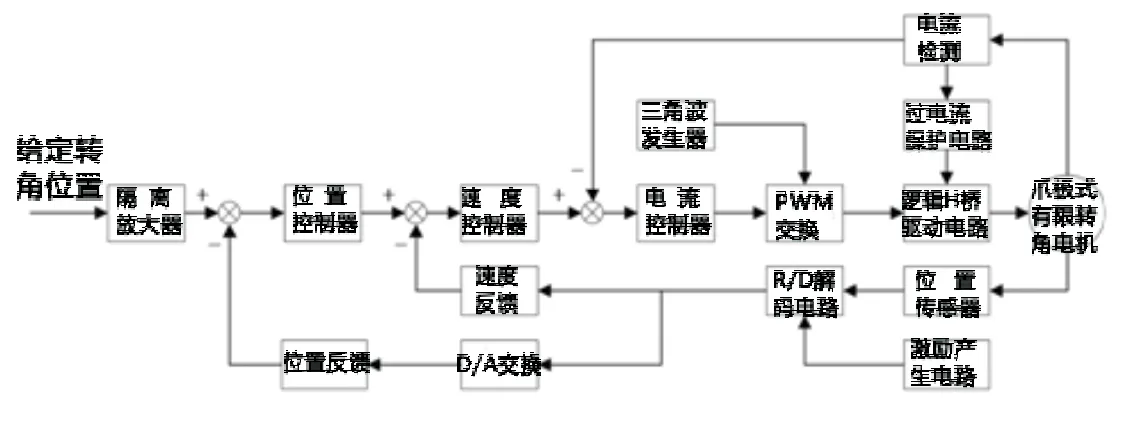
图8 电机驱动系统框图
如图8所示,电机控制器主要由位置指令信号输入电路、位置反馈信号输出电路、激励产生电路、控制器电路(位置环PID、速度PI、电流环PI)、R/D解码电路、逻辑H桥驱动电路、三角波及PWM产生电路、功率放大电路、母线电压检测电路、电流检测电路、故障输出电路、系统电源电路、其他辅助电路、电源母线、印制电路板等结构组成。主要功能是接受中央控制器的输入直流电(4-20)mA控制信号,将其转换为脉宽调制控制信号,并经过驱动放大输送给有限转角电机,产生电机的转矩输出;同时电机向位置传感器输入激励信号,驱动位置传感器检测电机转动方向和转角位置,并反馈回电机控制器,形成闭环控制,实时有效的控制电机的运转以及对电机转角位置的控制。
4 基于遗传算法的PID参数优化


根据ITAE准则,目标函数选取时间与误差绝对值的积分,式(22)能有效描述系统动态性能指标:
本次研究使用的遗传算法程序流程如图9所示:
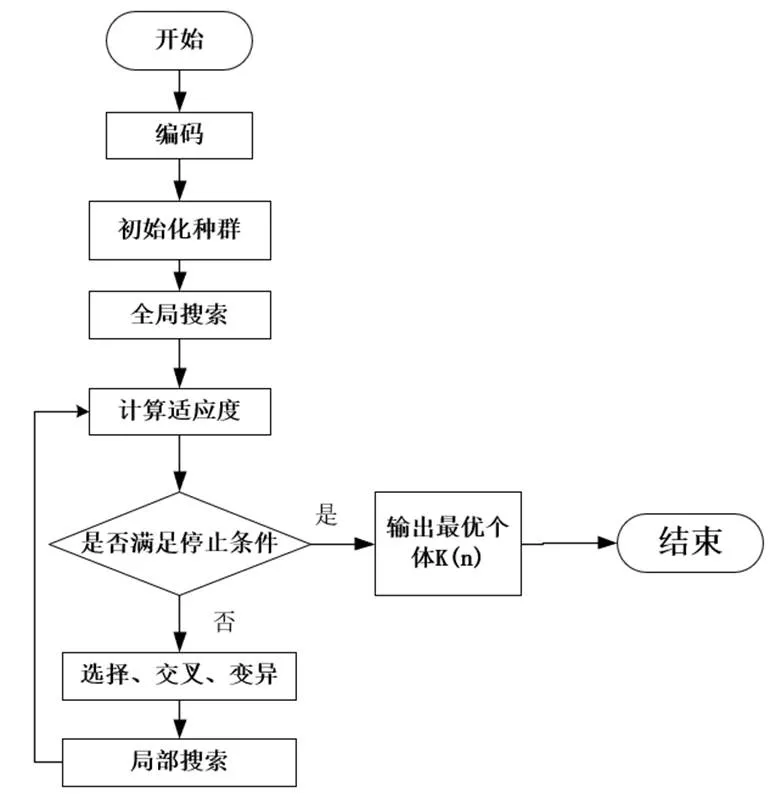
图9 遗传算法流程图

优化结果为:

5 Simulink仿真分析
已知电机转角范围为(-0.35rad , 0.35rad),转角超过范围电机进入堵转状态。与设计控制器思路相同,从内到外依次对各环的电流响应进行测试。首先画出最内环电流环的Bode如图10所示:

图10 电流环Bode图

图11 速度环Bode图
从电流环的(开环闭环)bode图可以看出系统是稳定的。开环截止频率大,电流环带宽为3 kHz,相角裕度28.9°,符合串级控制中内环带宽大,响应速度快的要求,电流环的设计较为合理。

图12 位置环Bode图
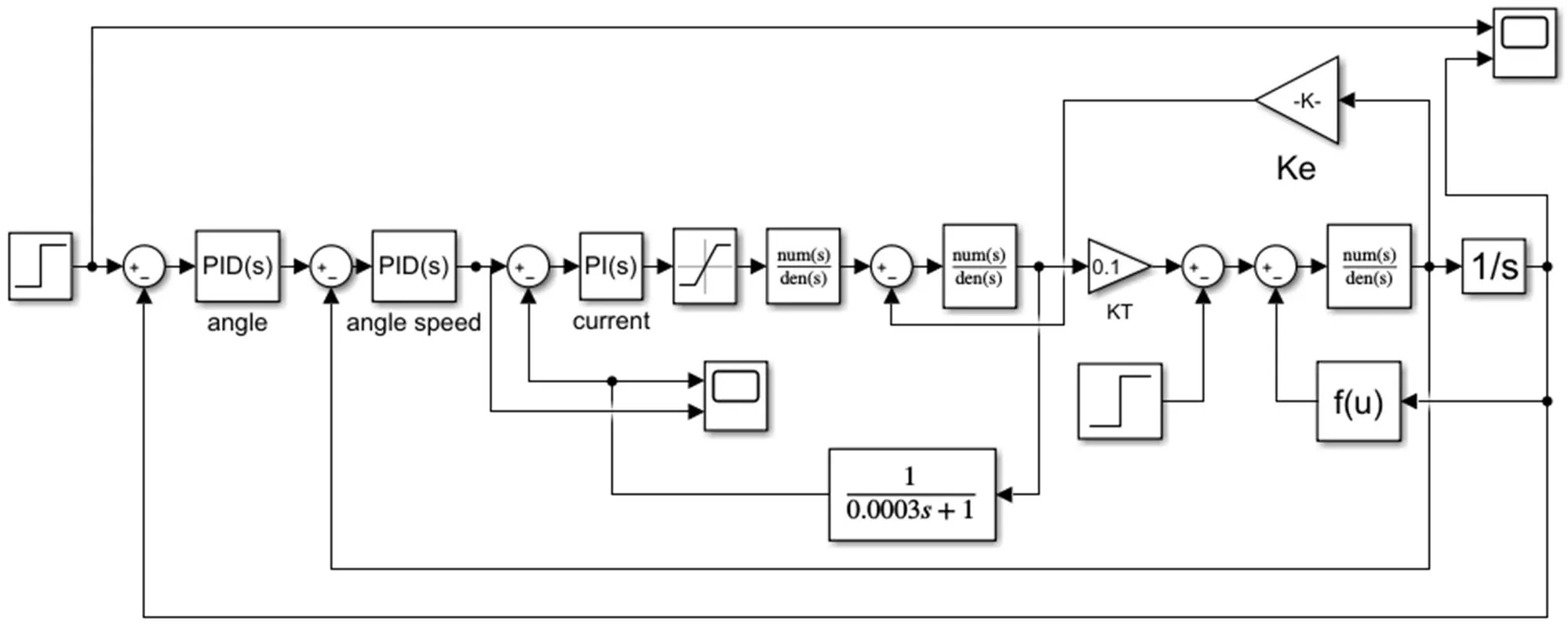
图13 Simulink仿真模型

根据上述分析,在Simulink中搭建有限转角电机的串级控制模型如图13所示,同时考虑式(9)中非线性部分,作用为负载转矩:

图14 位置环阶跃响应测试
分析位置环的阶跃响应,上升时间约为80 ms左右。如图14所示,跟踪给定信号响应速度较快,超调量小,满足伺服系统稳定性、准确性、快速性的要求。
模拟有限转角电机在平衡点来回摆动的工况,测试控制系统对低频正弦信号输入的响应情况。当给定位置信号为幅值0.1 rad,频率为10 Hz的正弦波信号时,电机位置变化如图15所示。可看出在低频段,电机位置跟踪输入值的效果较好,相位滞后较小。
当给定位置信号为幅值0.1 rad,频率为30 Hz的正弦波信号时,电机位置变化如图16所示。可看出电机位置跟踪输入值的效果变差,幅值衰减到原80%,相位滞后明显。通过以上分析发现电机具有低通特性,对高频位置输入信号响应结果较差,具体使用时还应合理设置滤波器参数对输入信号进行处理。
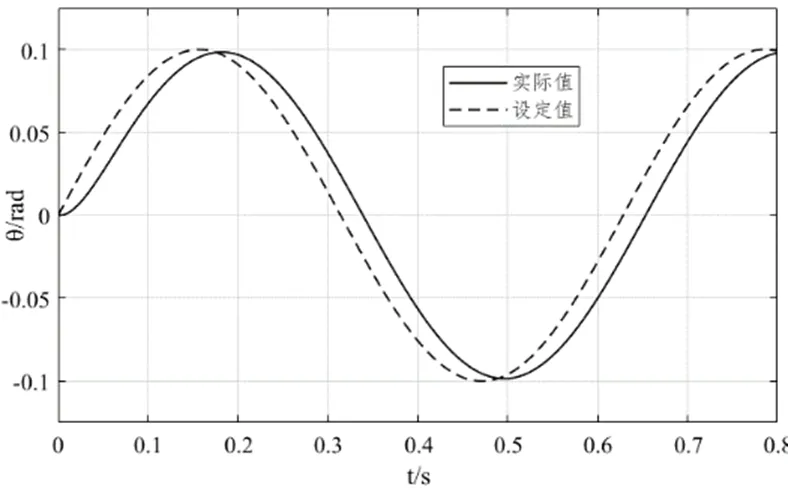
图15 位置环10 Hz正弦信号响应测试

图16 位置环30 Hz正弦信号响应测试
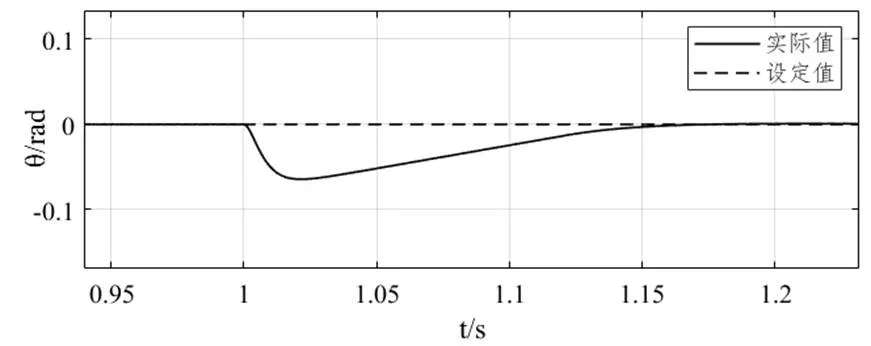
图17 位置环突加负载响应测试
7 结论

[1] 禹国栋. 集中绕组有限转角力矩电机及其特性的研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.
[2] 牟俊超. 柴油机调速用大工作能力直流力矩电机执行器控制技术研究[D]. 哈尔滨工程大学, 2017.
[3] 刘均喜. 磁阻反应式有限转角电机特性分析[D]. 天津: 天津大学, 2016.
[4] 苏宇, 张涛, 王相阳, 王金波. 有限转角直流无刷电机的建模与实现[J].计算机仿真, 2013, 30(04): 257-261.
[5] 杨小青, 王永嘉, 王佳. 点火器用有限转角电动机设计与仿真[J]. 微特电机, 2019, 47(09): 35-37.
[6] 宋恩哲, 姚崇, 孙军, 赵华伟. 有限转角直流力矩电机作为柴油机调速执行机构的控制策略研究[J]. 内燃机工程, 2009, 30(01): 45-50.
[7] 宋恩哲, 赵华伟, 孙军, 姚崇, 李金华. 有限转角力矩电机作为柴油机调速执行机构的设计研究[J]. 哈尔滨工程大学学报, 2008(08): 809-813+824.
[8] 田荣军. 数字化有限转角直流无刷力矩电机伺服控制系统[D]. 西安, 西北工业大学, 2003.
[9] Patrascoiu N. Modeling and simulation of the DC motor using Matlab and LabVIEW[J]. International Journal of Engineering Education, 2005, 21(1): 49-5.
[10]Zhang Y. High performance DSP-based servo drive control for a limited-angle torque motor[D]. Loughborough University, 1997.
Optimal Control of Limited Angle Torque Motor for Governor of Marine Diesel Engine
Zhou Li1, Tang Qing1, Tan Huiping2, Zhou Tanzhou1, Wang Xin1, Wang Yusong3, Chen Hui3
(1.Air China Guizhou Honglin Aviation Power Control Technology Co. Ltd., Guiyang 550000, China; 2.The Second Military Representative Office of the Air Force Armament Department in Guiyang, Guiyang 550000, China; 3. Key Laboratory of High Performance Ship Technology of Ministry of Education, Wuhan University of Technology, Wuhan 430063, China)
TM359.6
A
1003-4862(2021)09-0001-06
2021-06-24
国家自然科学基金(5190909200)资助。
周力(1970-),男,高级工程师。研究方向:航空电机与控制。E-mail:zhouli_1@msn.com
陈辉(1962-),男,博士,教授。研究方向:船舶机电设备控制。E-mail:hchen@whut.edu.cn
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
汽车维修技师(2019年7期)2020-01-16
测控技术(2018年7期)2018-12-09
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
制造业自动化(2017年2期)2017-03-20
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年4期)2016-11-07
装备制造技术(2016年7期)2016-09-26
制造技术与机床(2016年3期)2016-08-31
