
一种单目视觉里程计/UWB 组合室内定位方法
2021-10-13 08:43徐爱功闫可新
导航定位学报 2021年5期
徐爱功,闫可新,高 嵩,宋 帅,隋 心
(1. 辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000;2. 广州南方测绘科技股份有限公司 南方高铁研发中心,广州 510000)
0 引言
随着人们对定位服务需求的提高,室内定位技术成为研究热点[1]。在室内环境下,由于信号的遮挡,全球卫星导航系统(global navigation satellite system,GNSS)及与其相关的组合定位系统无法进行有效定位[2]。在此环境下,视觉传感器作为无源传感器,是定位常用的一类传感器,具有成本低廉、轻巧便携、安装简单、无需先验信息且数据信息丰富等优点,因此可以在弱GNSS 信号环境下进行定位[3]。文献[4]首先提出了视觉里程计(visual odometry,VO)一词,指通过连续的图像作为输入估计自身的运动,是同时定位与地图构建(simultaneous localization and mapping,SLAM)技术的重要组成部分。按照相机的种类,VO 可分为单目VO 和立体VO。相比于立体VO,单目VO计算量小且标定简单,应用更加广泛[5]。按照实现方法可分为基于特征点法的VO 和直接法的VO[6]。相比于直接法VO,基于特征点法的VO 对光照变化和动态场景鲁棒性强,不易受到光照和噪声的影响。因此本文选用基于特征点法的VO 进行单目视觉的定位。然而单目VO 算法属于相对定位方式,本身无法估计绝对尺度,在特征单一的场景下,其定位精度较低,容易跟踪失败且误差随时间累积。超宽带(ultra-wide band,UWB)[7-8]没有场景纹理特征限制且没有误差累积问题,在视距(line of sight,LOS)环境下,能达到厘米级甚至毫米级的测距定位精度。UWB 有多种定位方式,其中基于往返时间(round trip time,RTT)方法,通过对时间的测量间接计算出UWB 基准站与流动站之间的距离,不需要增加其他硬件,没有时间同步误差[9]。因此本文选择RTT 方法进行UWB 的定位。但是UWB 属于有源定位方法,在非视距(non line of sight,NLOS)环境下,由于障碍物的遮挡,信号无法直线传输,会产生折射、反射或透射现象,使UWB 定位精度和可靠性大幅降低[10-12]。
综合上述分析,认为在复杂室内环境下单独采用单目视觉传感器或UWB 进行定位很难得到可靠、高精度的定位结果,因此本文采用二者组合方式进行定位[13]。文献[14]提出将单目视觉ORB-SLAM算法输出的位置信息与UWB 解算的定位信息作为量测信息,通过扩展卡尔曼滤波(extended Kalman filter,EKF)进行数据融合来实现室内定位,但该文没有对UWB 的NLOS 误差进行鉴别与剔除。文献[15]提出了一种基于EKF 的单目视觉与UWB 融合定位的算法,利用UWB 流动站的平面坐标实现了单目视觉尺度因子的实时计算,适用于纹理稀疏、光亮度变化频繁的室内环境中的行人定位,两类传感器数据组合方式为松组合。文献[16]提出了一种通过单目视觉SLAM 增强UWB进行无人机室内导航的方法,实现无线定位未覆盖区域的自主飞行,在这种方法中,VO 被用来估计高度,然而飞行区域图是多次飞行建立的。文献[17]提出了一种利用惯性传感器、单目视觉和UWB,通过EKF 进行定位的方法,该方法用UWB 来辅助视觉惯性同步定位和制图,以获得改进的无漂移全局6 个自由度位姿估计,虽然结果精度较高,但使用3 个传感器增加了成本和融合的复杂度。基于以上分析,本文建立一种单目VO/UWB 组合的定位方法,将单目VO 的位移增量和UWB 的测距信息作为量测值,利用EKF 算法进行参数解算。该组合定位方法利用单目VO 推算的距离信息剔除UWB 的NLOS 误差,利用UWB 恢复单目VO尺度,在其中一种传感器定位精度降低或无法定位时仍能保证定位的精度。
1 单目VO/UWB 组合定位方法
在室内定位中,由于平面定位的需求多于高程定位[18],且高程定位所需基站多,成本高,不适用于实际应用,所以本文采用平面定位。
在单目VO/UWB 组合定位方法中,以UWB坐标系作为组合系统的坐标系,将单目VO 量测的位移增量经过空间变换转换到UWB 坐标系下。
1.1 单目VO 尺度因子估计
由于单目VO 无法直接测量尺度,在利用开始的前几帧图像进行初始化后,只能得到一个相对的尺度。因此,本文利用UWB 在这几帧运动过程中获得的绝对位置信息,推算得到的帧间绝对距离值,通过最小二乘算法对单目VO 进行绝对尺度因子的估计。
在组合移动平台初始运动阶段,平台从静止状态开始以较低的速度匀速向前行进,单目相机和UWB 按照设置的频率采集数据,单目相机得到一组等时间间隔的图像并进行初始化,在VO 中处理后得到相机在两帧之间的相对距离估计值dc,同时UWB 通过得到两帧之间的绝对距离值dr,则单目VO 的尺度因子s可表示为
上述过程存在UWB 的观测误差和单目相机的图像特征匹配误差,整体误差近似服从高斯分布,通过增加观测数据量的方式可以减小误差的影响。因此,本文用n组观测数据对单目VO 的尺度因子进行估计,分别计算每组数据的尺度因子,取平均值作为最终的尺度因子,具体表示为

利用上述方法可以消除一定的随机误差,特别在前后两组估计出的尺度因子相差较大时,UWB的观测误差还是会对结果造成影响。因此,本文利用最小二乘方法进行单目VO 尺度因子的估计,当误差最小时,认为估计出的尺度因子为正确值。
根据n组观测数据及式(1)得

通过该方法可以估计出单目VO 的尺度因子,这样既解决了误差的影响,又为其恢复了绝对尺度。在实际应用中,如果初始化时间较短,可以采用等权的方式进行最小二乘解算;如果初始化时间较长,同时考虑单目VO 本身的尺度漂移影响,应对不同的观测数据采用不同的权值,然后利用最小二乘算法进行尺度估计。
1.2 UWB 非视距误差鉴别
当UWB 定位出现NLOS 误差时,RTT 测距值会发生较大变化,如果不对NLOS 误差进行处理,会大幅降低单目VO/UWB 组合定位系统的精度及稳定性。单目VO 通过对图像序列进行预处理、初始化、位姿估计、跟踪局部地图等操作,得到相机每个关键帧的位姿。当在运动过程中,相机速度过快或在特征单一、光照不均匀、景深变化明显的环境下定位时,可能会发生跟踪失败的现象,此时单目VO 的尺度因子会发生大幅变化,根据前后历元的位移增量可以很容易对其鉴别。在跟踪正常情况下,单目VO 的位移增量是相对准确的,因此本文借助单目VO 的位移增量,对UWB 的RTT 测距值进行NLOS 误差鉴别。
根据单目VO 的坐标增量以及组合系统上一历元的坐标,计算当前历元组合系统的坐标,进而推算出组合系统与UWB 基准站间的距离,即

1.3 单目VO/UWB 组合定位算法
由于单目VO/UWB 组合是非线性系统,本文采用处理非线性系统的EKF 算法进行数据融合。
1.3.1 状态方程
单目VO/UWB 组合的状态方程为

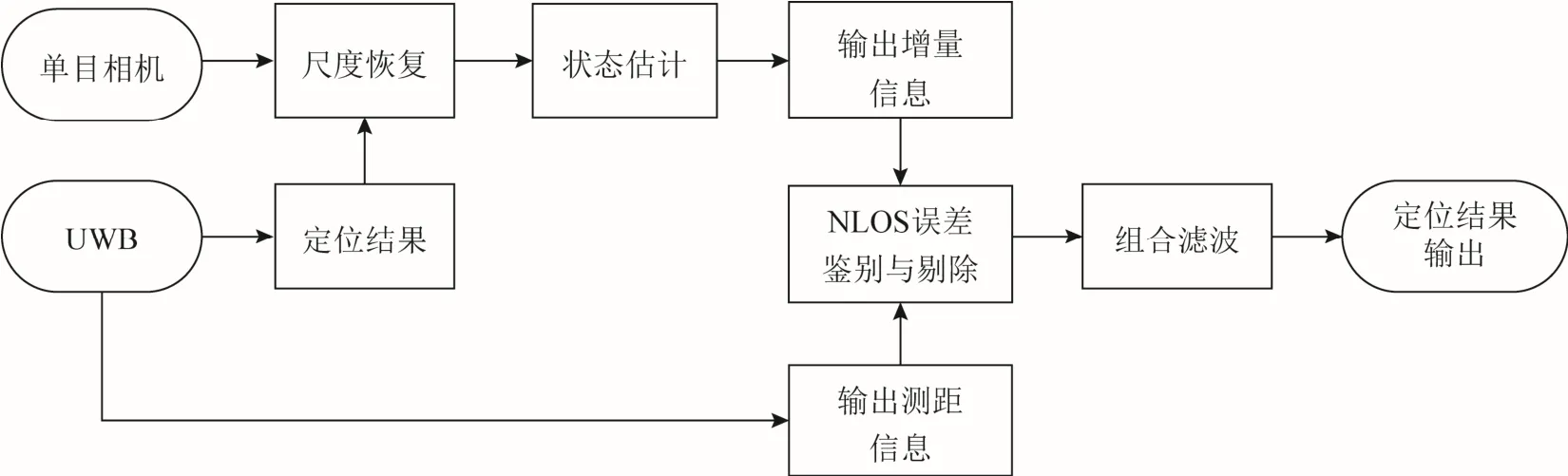
图1 单目VO/UWB 组合定位流程
2 实验与分析
2.1 实验说明
在本次室内实验中,组合移动平台使用的相机是德国巴斯勒(Basler)公司生产的Aca2500-20gc型号工业单目相机,曝光时间设置为20 ms,光圈大小设置为F2.8,图片分辨率设置为648×512。组合移动平台中使用的 UWB 是美国泰姆·多曼(Time Domain)公司生产的PulsON440 测距模块,其带宽为3.1~4.8 GHz。实验场景为教学楼内某会议室,如图2 所示。

图2 室内实验场景
实验前首先将相机和UWB 固定在移动平台上,通过标定外参数完成空间坐标系统统一,然后利用计算机对二者添加时间标签,进行时间同步。实验过程中设置相机和 UWB 的采样频率同为2 Hz,相机通过吉格·埃(GigE)接口、UWB 通过USB 接口同时向计算机传输数据。将徕卡(Leica)棱镜通过基座固定在移动平台上,组合定位实验平台如图3 所示。

图3 单目相机/UWB 组合定位实验平台
实验前将5 个UWB 基站安装在三脚架上,分布于室内各个角落,利用全站仪自动跟踪棱镜确定其真实坐标,利用7 个移动电源为1 个单目相机和6 个UWB 设备供电。设计好行进轨迹,实验时移动平台按照线路顺时针由静止开始匀速前进,利用全站仪自动跟踪观测移动平台的位置作为参考轨迹,本次实验轨迹总长度为31 m,实验时长为5 min,实验设计示意图如图4 所示。

图4 实验设计示意
2.2 实验结果与分析
对实验过程中单目VO 解算的结果与参考轨迹进行对比,结果如图5 所示。

图5 单目VO 解算轨迹与参考轨迹对比
从图5 可以看出,整体轨迹与真实轨迹较为接近,然而由于在转弯处相机景深和光照强度变化较大,导致单目VO 定位出现较大误差;由于单目VO 定位存在累积误差,导致定位误差逐渐增大,且最终无法回到起点,最大定位误差为35.6 cm。
对实验过程UWB 解算的结果与参考轨迹进行对比,结果如图6 所示。

图6 UWB 解算轨迹与参考轨迹对比
从图6 可以看出,在视距良好的情况下,UWB的定位精度能够达到厘米级,解算轨迹与参考轨迹无较大偏差。在有2 个柱体或人为遮挡的时候,非视距情况的出现导致定位结果存在较大误差,最大定位误差为29.5 cm。
将本文提出的单目VO/UWB 组合算法解算的轨迹与参考轨迹进行对比,结果如图7 所示。

图7 单目VO/UWB 组合解算轨迹与参考轨迹对比
从图7 可以看出,在有障碍物遮挡时,由于利用单目 VO 的位移增量鉴别并剔除了 UWB 的NLOS 误差,轨迹贴近参考轨迹;由于UWB 测距信息的加入,减小了单目VO 的误差累积。最大定位误差为11.4 cm。相比较于单一传感器,可以看出单目VO/UWB 组合定位方法解算的结果良好,有效地减弱了UWB 的非视距误差对定位结果的影响,减小了单目VO 的轨迹漂移。组合方法的定位轨迹更加接近参考轨迹,可靠性强。
单目VO 定位、UWB 定位以及单目VO/UWB组合定位方法在x和y方向上的误差如图8 所示。

图8 单目VO,UWB 和单目VO/UWB 组合三者误差
分析图8 可知,误差在各个方向上的趋势具有一致性。当出现非视距情况时,UWB 定位出现较大误差,误差的幅度大于单目VO 定位方法和单目VO/UWB 组合定位方法;在视距良好时,单目VO定位误差的幅度大于 UWB 定位方法和单目VO/UWB 组合方法。在整个实验过程中,单目VO/UWB 组合定位误差的幅度均小于单目VO 定位方法和UWB 定位方法。
表1 给出了在室内场景下,单目VO、UWB 以及单目VO/UWB 组合这3 种定位方法的结果在x和y方向上的误差统计。表1 中:RMSE 为均方根误差;MAX 为误差最大值。

表1 三种定位方法结果误差统计 单位:m
从表1 可以看出:1)单目VO 的定位精度相对较差,x方向的平均误差为10.3 cm,y方向的平均误差为6.6 cm,x方向最大误差为33.9 cm,y方向最大误差为13.8 cm;2)UWB 的定位精度相对较高,x方向的平均误差为4.1 cm,y方向的平均误差为4.7 cm,但易受到非视距的影响,x方向最大误差为29.3 cm,y方向最大误差为9.9 cm;3)单目VO/UWB 组合定位方法x方向的平均误差为3.6 cm,y方向的平均误差为3.5 cm,x方向最大误差为9.5 cm,y方向最大误差为8.4 cm,定位精度能稳定维持在8 cm 左右,相较于单一传感器鲁棒性更好,定位精度更高,可靠性更强。
本次实验结果表明,本文所设计的组合定位方法是切实可行的,该方法可以有效解决单目VO 定位中的误差累积问题,提高了VO 算法的稳定性,并解决了UWB 的NLOS 误差问题,提高了UWB定位结果的鲁棒性,组合定位精度可达亚分米级。
3 结束语
针对室内环境下单目VO 定位缺少绝对尺度且存在误差累积、UWB 定位受NLOS 误差影响的等问题,本文提出了一种基于 EKF 的单目VO/UWB 组合的室内定位方法,将单目VO 的位移增量和UWB 的测距信息作为量测值,通过EKF算法进行数据融合并进行了室内实测实验。实验结果表明,单目VO/UWB 组合方法减小了单目VO的误差累积,消除了UWB 的NLOS 影响,相较于单一传感器提高了整体定位的精度及鲁棒性。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
社会科学战线(2022年7期)2022-08-26
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
中国信息化周报(2015年1期)2015-04-09
时代英语·高三(2014年5期)2014-08-26
