
面向复杂电磁环境的自主天文测量计时器研究
2021-10-15 04:06刘梓豪王天阳程志博李西旸李崇辉
无线电工程 2021年10期
刘梓豪,张 超,王天阳,程志博,李西旸,李崇辉
(信息工程大学 地理空间信息学院,河南 郑州 450001)
0 引言
卫星导航系统已经在测量领域取得了广泛应用,但是其信号易受干扰或欺骗[1],尤其是在复杂电磁环境下,卫星导航系统难以获得高精度并且可靠的位置和时间信息。天文测量是根据天文方法观测自然天体的位置来确定地面点的经纬度和某一方向的方位角的方法,具备不受电磁干扰、误差不随时间累积等优点。在复杂电磁环境下,天文测量也能获得高精度的定位定向结果[2]。
由于地球的运动和恒星自身位置的不断变化,天体和测站间的相对位置时刻都在发生着变化,因此天文测量需要在记录天体位置的同时记录相应的观测时刻[3]。测时的精确程度直接影响天文测量的精度,一个时秒的时间记录误差将导致15角秒的观测结果误差,定位误差最大可达到450 m[4]。由此可见,测时在天文测量中是一项十分重要的工作。目前,天文测量计时方法主要是接收全球导航卫星系统(Global Navigation Satellite System,GNSS)播发的高精度协调世界时(Coordinated Universal Time,UTC)作为标准时间,通过将外界标准UTC和计算机晶振时间进行时间对比,使得计算机晶振短时间内能够维持高精度的UTC。由于计算机晶振的频率高,恒星位置的时刻能被准确地记录下来[5]。利用该方法,计算机时间可以在短期内满足一等天文测量外业预计算的精度要求。
然而在面对复杂电磁环境时,卫星导航信号的完好性无法得到保证,这必然会影响到天文测量计时工作,极大地限制了天文测量的自主性。针对这一局限性,天文测量计时器需要一个频率稳定度高、体积和功耗小、长期守时精度高的频率源来维持UTC。文献[4]提出利用较高频率稳定度的数字温补晶振与嵌入式系统结合构建天文计时器来保证长时间的天文测量计时工作,实验证明该计时器在20天内的守时精度为±4 ms,可以满足一等天文测量需求,但无法满足更长时间的应用需求。
原子钟因其高频率稳定度适合作为天文测量计时器,但是传统原子钟的体积大、重量大和功耗大等原因无法满足天文测量计时器的便携性和低功耗要求,因此原子钟一直未被用于天文测量领域。
近年来,原子钟技术的迅速发展使得原子钟的体积、功耗等问题得到解决[6]。2011年,美国Symmetricom公司发布了第一款芯片原子钟商业化产品,该产品体积为17 cm3,功耗110 mW[7];2014年,中科院武汉物数所研制出芯片原子钟的样机,体积小于20 cm3,功耗小于220 mW;同年,成都天奥电子有限公司研制出体积小于24 cm3,功耗小于0.6 W,百秒频率稳定度为5×10-11的芯片原子钟样机;2015年,航天科工203所研制出功耗为3 W的第一代样机,随后又研制出体积小于20 cm3、功耗小于1 W的芯片原子钟[8]。芯片原子钟技术的成熟为其作为新一代天文测量计时器提供了可能。本文以芯片原子钟为基础,构建了一种小型化高精度的天文测量计时器,并进行了短期和长期时间比对实验,分析了计时器的授时性能以及长时间的守时性能。
1 自主天文计时器设计
1.1 天文测量系统概况
天文测量系统由全站仪、计算机、卫星天文计时器、相应附属设备及其软件系统组成,如图1所示。系统进行测量前,计算机通过串口线连接全站仪和卫星天文计时器[9]。天文测量的第一项工作就是使用计时器与计算机进行时间比对;其次,使用全站仪观测天体,采集水平角和高度角等测量数据,并将数据回传计算机,同时计算机要记录观测数据到达时刻,并自动改正到观测瞬间时刻;最后,通过概略测站坐标、天体的水平角、高度角和观测瞬间的时刻等信息求得天文经纬度或天文方位角。

图1 天文测量系统主设备Fig.1 Main equipment of astronomic measurement system
在天文测量系统中,计时器是用来完成计算机时间比对工作的主要设备。自主天文计时器是为了在不依靠外部信号条件下,利用自身的频率标准来完成守时和授时。原子钟的高频率稳定度、不依靠外界信息等优点,使其适合作为自主天文计时器的核心部件。考虑到兼容性,自主天文计时器可以提供2种数据格式的输出:一种是自定义二进制格式输出;另一种是NMEA-0183字符串格式输出,用户可以根据自己的需求选择输出相应的格式类型[9]。自主天文计时器不仅提供标准UTC,而且还同时提供秒脉冲(Pulse Per Second,PPS)输出。因此,可使用串口通信协议与计算机进行通信,通过将秒脉冲搭载到串口线路来完成时间的传递工作。基于原子钟的高频率稳定度,原子钟在完成驯服后断开天线也可长期维持天文测量时间基准。
1.2 时间比对实现
时间比对要求计算机和计时器设备有信息传递,通常使用串行接口来完成二者之间的信息传递[10]。串行接口的通信方式是一条信息的数据被逐位按顺序传送的通信方式,但时间比对还需要实现PPS传递,所以需要对串行接口针脚的使用进行针对性设计。考虑到通用性,使用的串行接口标准一般是RS232C接口标准,接口使用DB9,其针脚各功能如表1所示。
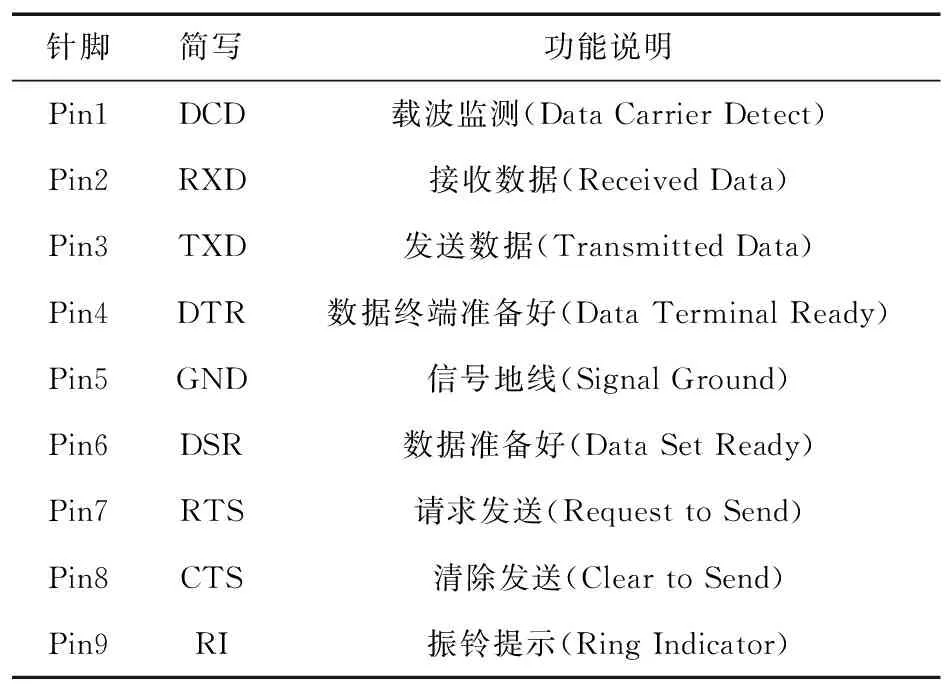
表1 串口针脚功能Tab.1 Serial port stitching function
对计算机最重要的是使用串口接收来自天文计时器的时间信息和PPS。PPS可以通过电位变化来表达,时间信息可以通过第2针RXD针进行接收。在串口通信中,能用于判断电位变化的针脚有:1针DCD针、6针DSR针、8针CTS针和9针RI针。因此,PPS的变化可以转化为串口中某针的电位变化,计算机通过识别串口中对应针脚的电位变化即可识别PPS的变化,从而达到时间比对的目的。通常,PPS被搭载在第8针CTS针上,用高电平代表PPS,低电平代表无信号输出[9]。
针对串口通信,微软公司推出了MSComm的ActiveX控件,使用MSComm控件可以达到计算机对串口某针的电位监测[9]。其中的OnComm事件就是实现时间比对的关键,利用OnComm事件对指定函数进行绑定,即可在串口某针信号产生变化时执行指定函数。通过属性设定可以调整为仅CTS线变化才产生OnComm事件。OnComm事件的变化有2种,其属性值由Ture变False对应PPS的下降沿,False变True对应PPS的上升沿。搭载PPS的针脚可以使用相应的属性值变化对其进行判断,对于搭载在第8针CTS针上的PPS信号,可以使用CTSHolding属性的True和False来进行判断,True对应高电平,False对应低电平,通常PPS检测为其上升沿的到来,即CTSHolding属性为False变为True的时刻。PPS、计算机计时器和CTSHolding属性关系如图2所示,其中计算机晶振的分辨率高于1 μs,因此计算机晶振和PPS的对齐精度高于1 μs。
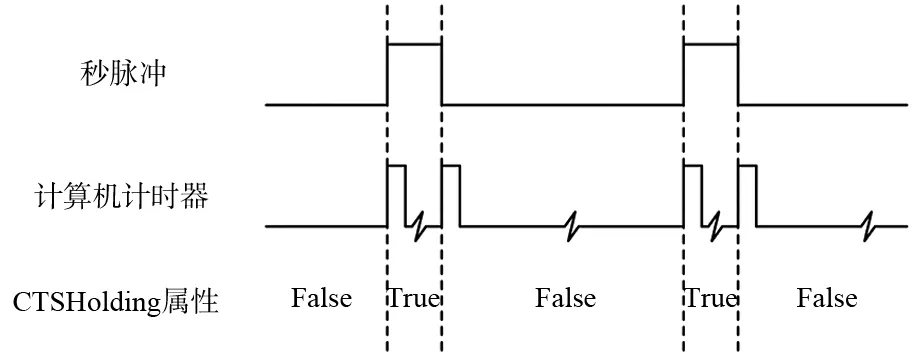
图2 PPS、计算机计时器和CTSHolding属性关系Fig.2 PPS,computer timer and CTSHolding property relationships
计算机时间主要使用64位高分辨率计数器来得到,计数器有计数值和计数频率2个指标,对应的API函数为QueryPerformanceCounter()和QueryPerformanceFrequency()[11]。计数器的计数值由计算机计时芯片的晶振提供,每次开机从零开始计数,关机之后归零,所以使用计数值除以计数频率,即可得到计算机开机持续工作的时间。计数频率是指计数值每秒增加的量,该值在开机之后不会改变,但晶振实际频率通常在该值附近波动。计数频率通常大于10 MHz,因此其分辨率至少为1 μs。但是,因为Windows操作系统为抢占式多任务操作系统[12],程序在PPS到来时难以做到及时地读取计数器的计数值[13]。文献[9]的实验证明,计算机的计数值读取精度可优于10 μs,且计算机CPU速度越快,精度越高,同时利用10台计算机也证明了计算机时间的钟速稳定性24 h内可以满足一等天文测量对时间的要求。
在计算机和计时器完成连接后,利用程序读取PPS到达瞬间的计算机内部计时器的计数值,并经过相应数据解算后即可实现时间比对。考虑到计算机的操作系统为抢占式多任务操作系统,程序可以设定为连续授时几分钟。根据最小二乘原理结合抗差理论可以在尽可能地减小粗差的情况下计算出钟差和钟速[14-15]。
2 时间比对方法
钟差是指某一时刻时钟的钟面时与正确时的差值,通常用u表示[16]。假设钟面时时刻为t,同一时刻对应的标准时时刻为T,则此钟的钟差可以表示为:
u=T-t,
(1)
式中,u为正,表示钟面时走的比标准时慢u值;u为负,表示钟面时走的比标准时快u值。
钟速指的是单位时间内钟差的变化值,通常用ω表示。若使用u1,u2分别表示钟面时t1和t2瞬间的钟差。令t2>t1,则在t1和t2期间的钟速表示为:
(2)
式中,ω的正负表示此钟运行的快慢,为正表示钟越走越慢,为负表示钟越走越快。
评判一个钟的质量优劣是通过钟速稳定性来评判的,而钟速稳定性通常是由时钟频率源的频率稳定度决定。一等天文测量对钟速的要求为:10 h内钟速的最大互差不超过5 ms;二等天文测量对钟速的要求为:10 h内钟速的最大互差不超过10 ms[17]。
由钟速公式变形即可得任意时刻的钟差为:
u=u0+ω(t-t0)。
(3)
若已知某钟面时t0和对应瞬间的钟差u0,以及t0到t之间的钟速ω,则可计算得到钟面时t时刻对应的钟差u。
使用计算机与卫星天文计时器进行时间比对,卫星天文计时器时间为从GNSS信号中提取的UTC时间,因此利用式(3)得到:
(4)

(5)
使用最小二乘理论[18]得:
(6)
式中,P为权阵。同理,使用计算机与原子钟进行时间比对,利用式(3)可以建立以下关系:
(7)

3 实验及精度分析
为证明原子钟作为自主天文计时器的可行性,本文使用芯片铷原子钟进行时间比对。由于目前计算机普遍不再具备串行接口,因此计算机选择使用工控机。测试实验中,原子钟具备用于驯服原子钟的GNSS天线,GNSS信号正常的情况下,接上天线10 s内可完成驯服。驯服后原子钟时间与UTC北京时间同步,输出的1PPS精度优于100 ns,1PPS抖动小于200 ns,1PPS上升时间小于5 ns,脉宽200 ms。10 MHz频率基准信号输出波形为正弦,幅度≥0.5 V,功率≥7 dBm,频率稳定度≤5×10-11,开机特性≤5×10-10。时间信息通过航插转DB9接口,电平为5 V,输出时间信息为NMEA0183中的GPRMC格式,时间比对程序使用C#完成。
原子钟的精度和稳定性可通过原子钟时与标准UTC的钟差、钟速以及残差中误差来描述。一等天文大地测量要求10 h内钟速的最大互差不超过5 ms/h,一等天文经度测量要求中误差不超过20 ms/h[17],因此实验以10 h钟速最大互差和授时残差中误差作为评价芯片原子钟短期授时性能的指标,以与标准UTC的钟差作为评价芯片原子钟长期守时性能的指标。
3.1 芯片原子钟短期授时性能测试及分析
为验证原子钟是否能替换传统的卫星天文计时器用于天文大地测量,将芯片原子钟与卫星天文计时器同时连接在同一工控机上进行时间比对。实验中,在原子钟完成驯服后即断开GNSS天线,由于原子钟不再接收任何外界信息,只需正常供电就可以自主维持时间基准,所以可以摆脱对外界信号的依赖,提高天文测量系统的自主性。
首先,为测试不同授时间隔所对应的最大钟速互差,将10 h连续时间比对数据分别以1,2,5,10和20 min为间隔,使用抗差估计进行钟差钟速计算,实验结果如表2所示。由结果可以看出,无论采用多长时间间隔进行计算,芯片原子钟和卫星计时器的钟速最大互差均相差不大,说明二者与计算机进行时间比对的性能相当。此外,二者都需要使用至少5 min的时间间隔才能达到一等天文测量的要求,即最大钟速互差不超过5 ms/h。
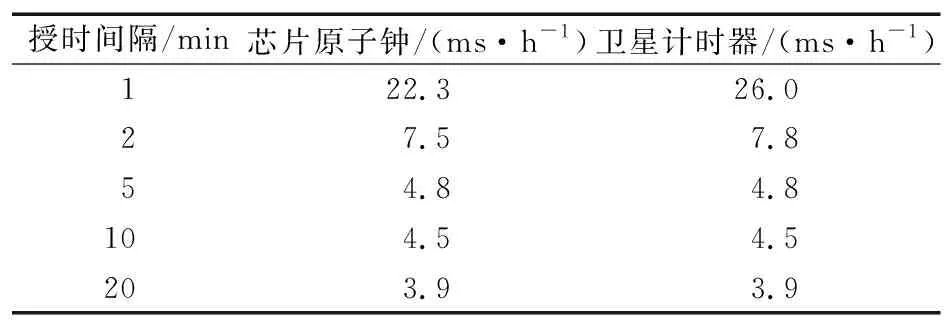
表2 钟速最大互差统计值Tab.2 Statistics of maximum clock speed difference
其次,为测试芯片原子钟和卫星天文计时器的授时残差中误差,将连续约31 h的时间比对数据分为5分钟/组,使用抗差估计计算每组的钟差、钟速和残差中误差,实验结果如图3所示。从图3可以分析得出,使用芯片原子钟和使用卫星计时器在残差中误差的变化上基本一致,最大的残差中误差值分别为49.1,48.4 μs,残差中误差平均值分别为16.6,16.8 μs。因此,使用芯片原子钟可以达到与使用卫星计时器同等精度的残差中误差,能够满足一等天文经度测量所要求的20 ms精度。

(a) 原子钟
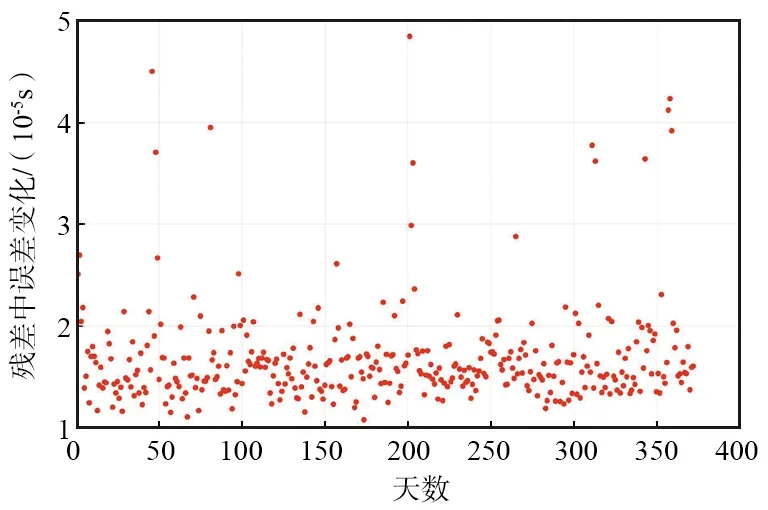
(b) 卫星计时器图3 残差中误差变化Fig.3 Changes in RMSE
3.2 长期守时精度分析
为了进一步分析在长期没有GNSS信号的条件下,基于芯片原子钟的天文计时器能否满足天文测量的需求,而原子钟时和标准UTC间的钟差可以体现长期守时精度,因此实验主要分析二者之间的钟差长期变化情况。实验使用高精度北斗驯服的铷原子频率标准作为标准UTC,每天使用计数器和示波器对原子钟时和标准UTC进行一次时间比对,并计算二者间的钟差,连续30天实验结果如图4所示。实验结果表明,芯片原子钟的钟差随时间逐渐增大,第30天的钟差变化为184.3 μs,远远小于天文经度测量要求的20 ms限差,证明芯片原子钟在不连接GNSS信号的条件下,至少可以在30天内达到一等天文测量对计时器的要求。
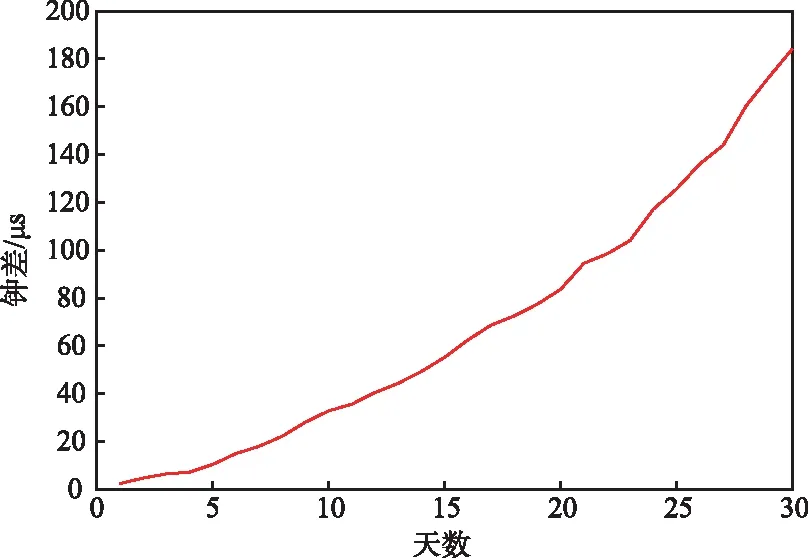
图4 原子钟时与UTC间钟差变化Fig.4 Variation of the time difference between UTC and atomic clock
4 结束语
本文提出了利用芯片原子钟替代卫星计时器作为天文测量时间比对设备的方法,并通过相关实验进行了验证。实验结果表明,芯片原子钟与卫星天文计时器的短期授时性能相当,采用5 min时间间隔时,其10 h的钟速变化最大互差为4.8 ms,满足一等天文测量对时钟要求的5 ms限差;时间比对残差中误差为16.6 μs,满足一等天文经度测量要求的20 ms限差;30天守时钟差为184.3 μs,满足一等天文经度测量要求的20 ms限差。因此,芯片原子钟在完成驯服后断开天线,只需正常供电就至少可以在30天内达到一等天文测量的要求。相较于卫星天文计时器,可以极大地减弱对GNSS信号的依赖,提高天文测量的自主性。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
作文周刊·小学一年级版(2022年12期)2022-03-19
海外星云(2021年9期)2021-10-14
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
导航定位学报(2018年3期)2018-09-03
中国军转民(2018年3期)2018-06-08
妈妈宝宝(2017年2期)2017-02-21
载人航天(2016年4期)2016-12-01
中小学实验与装备(2014年1期)2014-05-26
导航定位学报(2013年1期)2013-07-25
