
基于GNSS-IR技术高精度水库水位监测研究
2021-10-15 04:06宋敏峰何秀凤
无线电工程 2021年10期
宋敏峰,何秀凤
(河海大学 地球科学与工程学院,江苏 南京 211100)
0 引言
近年来,基于全球导航卫星系统(Global Navigation Satellite System,GNSS)反射信号的遥感技术持续受到关注,由于GNSS信号具有免费和信号源丰富等特点,促使该技术在天、空、地3个维度全面发展[1-2]。基于地面GNSS观测站的干涉测量(GNSS Interferometry Reflectometry,GNSS-IR)技术为近地表环境(土壤湿度、雪深、雪水当量、植被、潮汐等)的监测提供了更多可能[3-4],其中基于该技术利用沿海GNSS测站为海平面长期监测提供了一种新的低成本手段。已有多位研究学者基于传统的监测站验证了GNSS-IR潮位监测的可行性和有效性[5-7],且监测精度均可达到10 cm,相关系数均可达到0.97[5],但该技术应用于内陆水域的水位变化监测较少。许多大型调蓄水库等储水基础工程为保障水库大坝安全均安装了GNSS大坝形变监测系统,同时也设立了专门的水位监测以确保水资源的优化调度。而GNSS-IR技术可以充分利用该测站进行水位的监测以节省大量的人力物力,但目前该方法还未有效推广。针对于此,本文在经典潮位反演方法的基础上,给出了基于GNSS-IR技术的内陆水库低成本、高精度的水位监测方法。
1 方法与原理
多路径的产生非常复杂,GNSS-IR技术可以充分利用被摈弃的低仰角数据实现高度变化反演,如水位的变化、雪深的监测[8]等。GNSS-IR水位监测如图1所示,沿海测站天线接收到的是由直射信号和经由水面反射的信号干涉合成的GNSS多路径信号。
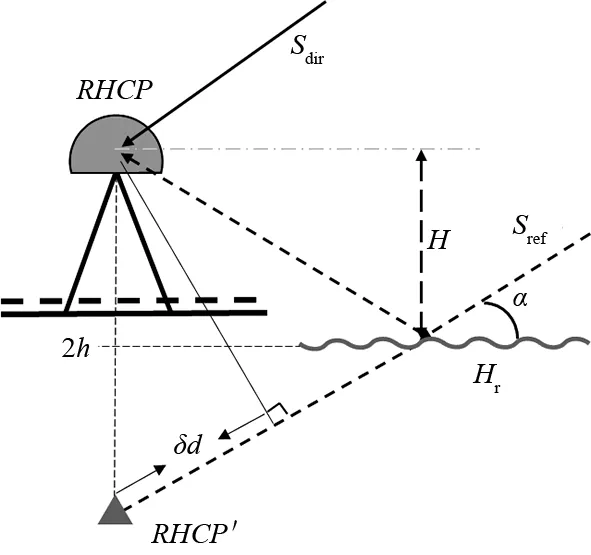
图1 GNSS-IR水位监测Fig.1 GNSS-IR water level monitroing
图1中,h为天线相位中心距离水面的距离,由于地基的监测范围小,且反射点与测站的距离相对于卫星至接收机的距离很小,可认为水面反射点处至卫星的高度角与接收机处相等,因此基于图1所示的几何条件,可得到直射信号与反射信号之间的传播路径差 ∂为:
∂=2hsinθ,
(1)
式中,θ为天线相位中心处的卫星高度角;h为天线相位中心距离水面的距离。由式(1)可知,天线距离水面的高度以及高度角的变化会影响反射信号与直射信号传播的路径差,且直射信号与反射信号同时到达接收机处时会产生干涉效应,该干涉效应并不需要直接测量,而GNSS 观测文件中的信噪比(SNR)可以体现。基于多路径干涉信号仿真软件MPSIM可以仿真不同地表环境和不同天线高度等多参数控制的SNR[9],如图2 所示。

图2 天线距离反射面高度为2 m的SNR仿真示意Fig.2 Simulations of the SNR of the antenna at a height of 2 m from the reflector
由图2可以看出,在低高度角条件下,信噪比数据呈现周期振荡趋势,周期振荡随着高度角的增大,振荡振幅趋势逐渐减小。而造成该振幅减小的原因是多方面的,主要与3个因素有关:第一是天线的增益模式。由于GNSS为右旋圆极化信号,且GNSS天线也为右旋圆极化,从而避免左旋圆极化方式的信号。右旋圆极化GNSS信号经过地物反射会随着高度角的变化呈现不同的左右旋圆极化比,在低高度角单次反射时,反射信号以右旋圆极化占主导,高度角越高,天线能接收到的反射信号中右旋圆极化成分越少,从而信噪比不再具有振荡效应。第二,天线增益随着入射信号从俯视入射到仰视入射逐渐减小,在低高度角时,为反射信号相对于直射信号强度最大的时刻,这也是大地测量型应用中需要设置截止高度角的原因。第三,受到反射面的影响,根据瑞利准则,高度角越低,反射面相对于入射电磁波越光滑,此时反射的信号强度也越大[10]。除了振荡趋势的衰减,该振荡的周期性与天线相位中心距离反射点的垂直高度相关[11],由图1和式(1)可知,高度越高,直射信号与反射信号之间的传播延迟差越大,在相同的时间内,延迟相位变化越快。因此,可以通过提取该振荡频率求解该距离差。对图2中SNR可认为主要由2部分组成[12]:
SNR=SNRd+dSNR,
(2)
式中,SNR为观测文件信噪比序列;SNRd为直射信号主导的信噪比主趋势;dSNR为有反射信号与直射信号干涉导致的残余SNR。一般可用对低高度角区间段SNR进行低阶多项式拟合的方式去除主趋势而得到残余信噪,对残余SNR进行频谱分析可得到其振荡频率f。dSNR可建模如下[13]:
(3)
式中,Pref为反射信号强度,该参数主要影响SNR周期振荡的振幅大小;h为天线距离反射面的垂直距离;ξ为残余SNR振幅衰减因子,其大小主要影响SNR振荡衰减快慢,与反射面的粗糙度、反射面介质和天线增益等相关;κ为载波波速;φ为随机误差相位值。由于SNR随高度角的变化为非均匀的,本文采用Lomb-Scagle 谱分析方法[14],另外也可使用其他分析方法[10]。得到频率f后,进一步可以得到天线相位中心至反射面的高度:
(4)


(a) 1.5 m
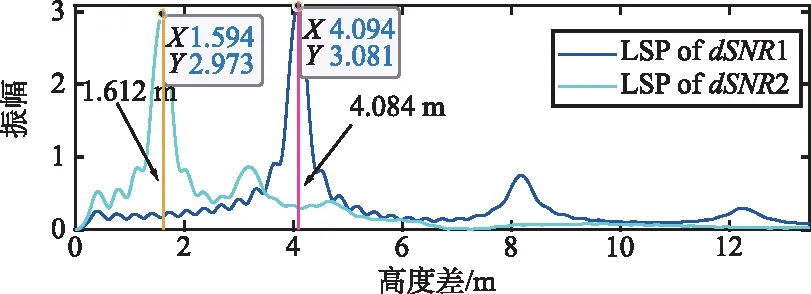
(b) 4 m图3 天线高度为1.5,4 m时SNR仿真及其频谱分析结果Fig.3 SNR simulation and spectrum analysis results for antenna heights of 1.5 m and 4 m

另外,由于该方法是基于反射面的高度在残余SNR时间段内不变的假设,因此需要进一步添加潮位动态改正,可以得到反射面的高度Href[15]:
(5)

2 数据集
为验证GNSS-IR方法在水库测站上的应用效果,选择双王城水库大坝稳定性监测系统的GNSS测站进行分析,测站分布如图4所示。

图4 双王城水库大坝GNSS形变监测系统测站Fig.4 GNSS deformation monitoring system stations at Shuangwangcheng reservoir dam
双王城水库位于山东潍坊寿光市,水库大坝轴线总长达到9.636 km,坝高12.5 m,最大库容量达到6 150万立方米,是南水北调东线胶东干线工程的重要调蓄水库。为了监测水库大坝的稳定性,在大坝周围建立了3个监测站和1个基准站,其中SW43点为基准站,距离大坝约300 m,SW50,SW51,SW52均为监测站,通过观测墩方式安装于大坝坝顶水库内侧。位于SW50监测点附近有1个人工读尺方式的水位监测站,记录每日的水位,可作为交叉验证数据进行精度评定。实验收集了2017年7月1日—12月31日SW51监测站的观测数据以及对应时期水位监测站的水库日实测水位数据。GNSS接收机的观测数据采样间隔为15 s,且可以观测到GPS和BDS卫星多频观测数据。测站位置的水域方位角为130°~225°,高度角截取范围为5°~15°。
3 验证
如前所述,GNSS-IR技术监测水位的主要方式是通过获取天线至水面的垂直距离间接得到反射面的高度,而此时水位站的实测水位基准为该水库独立水位基准,且该基准与大地测量坐标不统一,未知天线相位中心在该水位高程基准的高度,所以此处通过最小二乘方式基于GPS SIC SNR的水位结果得到SW51测站天线相位中心在水位高程基准中的高度。
3.1 水位监测结果
对2个测站收集的GPS和BDS双系统的数据进行分析,并采用LSP谱分析方法提取主频率,2种系统的多个频率的结果如图5所示。

(a) SW51测站,基于GPS系统 S1C,S2L和S5Q信噪比数据得到的水位结果

(b) SW51测站,基于GPS系统 BDS系统S1I ,S7I和S6I图5 基于GPS和BDS系统6个频段数据的水位监测结果Fig.5 Water level monitoring results based on six frequency bands of GPS and BDS systems
为了便于评估精度,对GNSS-IR方法反演的水位进行平均滤波处理得到日平均水位结果。由图5可以看出,基于GPS和BDS系统的不同类型SNR数据均可以通过GNSS-IR方法有效且准确地监测水位变化。与实测水位相比,总体趋势几乎一致,经过统计分析,不同频段的SNR数据得到的日平均水位精度约为3~4 cm,且相关系数均达到0.99以上,但同时也可以发现,不同频段数据之间存在较小的系统偏差,使得在同一水位基准下不同频段数据的结果出现整体偏移现象,需要进一步分析和改正。
3.2 多频间偏差分析及改正
基于同一测站的天线和接收机之间存在不同大小的系统性偏差,该偏差包含了天线接收不同频率的相位中心间距以及其他未知误差。经过进一步分析,除了系统偏差外还存在随高度变化的线性误差,如图6所示。
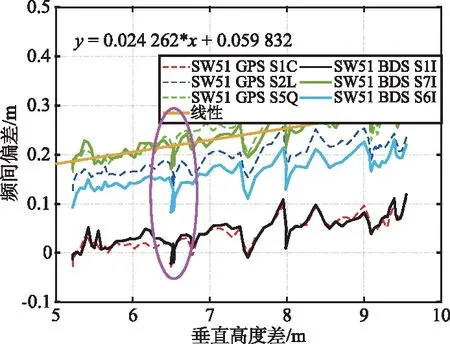
图6 多频段数据水位反演结果的系统偏差及线性误差Fig.6 System deviationand linear error of water level inversion results of multi-band data
由图6可以看出,在不同高度差的条件下,GNSS-IR方法存在一个随高度差变化的系统误差,可根据图中椭圆区域的水位变化分析确定。在该区间内,不同频段的结果均存在聚集现象,该结果与图5中年积日为330~340之间的水位对应。由于此时的水位几乎未发生改变,因此表明在不同的高度差情况中,该偏差与高度差有关,与文献[15]得到的结论相一致。通过拟合的方式进行系统偏差和线性偏差改正可以进一步提高水位监测结果的精度:
(6)

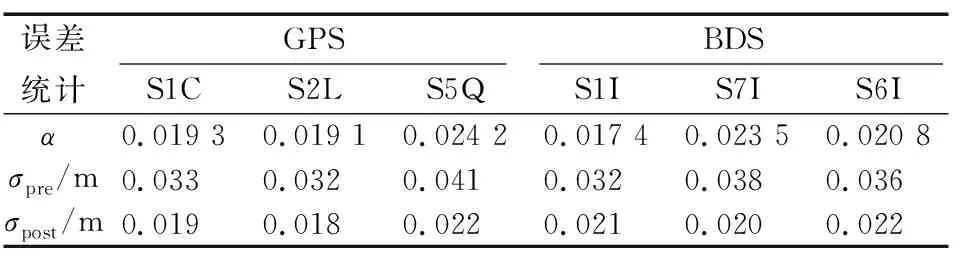
表1 SW51 测站基于GNSS-IR方法的水位监测结果统计Tab.1 Statistics of water level monitoring results based on GNSS-IR method at SW51 station
表1中,σpre为线性误差改正前的精度,σpost为线性误差改正后的水位反演精度,不同系统的不同频段误差系数较小,基本在0.017~0.024,这表明1 m的高差可能会导致1.7~2.4 cm的线性误差,如果在基于该方法监测水位变化范围较大且要求精度较高的情况下,需要考虑此误差。经过多项误差改正后,多个频段的水位反演结果精度均达到了1.8~2.2 cm,该精度基本上已经达到了水库水位监测需求。
4 结束语
GNSS-IR高度差反演方法为水库水位的监测提供了一种新的低成本手段。该方法不需要额外人工成本即可实现高时间分辨的水位监测,经过双王城水库数据的验证,表明该方法的监测精度可以达到2 cm,与人工监测相比,不仅可以降低人工成本,还可以通过多系统、多测站的方式获取高时间分辨率的水位结果,可以作为已建GNSS测站的内陆储水设施的水位监测备选手段。另外,通过进一步分析表明,同一测站之间的不同频率得到的水位结果存在系统偏差,且同时伴有随高度差变化的线性误差,需要在GNSS-IR技术用于传统潮位监测的方法添加线性误差和频系统误差改正。不同的频间线性误差系数也表明多频融合的方法不能忽略该误差对融合的影响。
猜你喜欢
地理空间信息(2022年11期)2022-11-26
中国测试(2022年5期)2022-06-10
测绘地理信息(2022年2期)2022-04-02
陕西水利(2021年5期)2021-06-21
航天制造技术(2020年5期)2020-11-10
天文学报(2020年5期)2020-09-28
科技视界(2020年19期)2020-07-30
中学生数理化·七年级数学人教版(2008年10期)2008-01-21
