
基于负反馈的电机差速震荡抑制方法
2021-10-15 04:06李佳兴孟庆宇
无线电工程 2021年10期
孙 宇,李佳兴,赵 彧,孟庆宇
(1.中国人民解放军61112部队,黑龙江 牡丹江 157000;2.黑龙江省林业职业技术学院 信息工程系,黑龙江 牡丹江 157000)
0 引言
在双马达驱动系统中,天线俯仰或方位轴上的2台电机之间经常会出现以轴为节点,大小相等、相位相反和低频率的阻尼震荡。会叠加在2台电机的平均速度上,使电机产生不能自行消除的差速震荡,因此对于实现对2台电机在匀速状态下或加减速状态下的精准同步控制至关重要。在正常运转下,电机通过三环进行控制,且控制环路内2台电机的标称值相同,因此2台电机的输出速度应该一致。然而在电机设计出厂时,即使电机内部件参数相同,在实际应用中电机所表现出来的特性也会略有差别,导致同步控制效果出现差异,因此需通过更精准的控制环路控制电机同步运转[1]。
目前常用的天线伺服系统所采用的是和速反馈控制方法,由于和速反馈在双电机之间产生速度差时无法及时进行抑制,特别是在天线上电后快速置位、跟踪目标时的变速运动和归零前的反向减速过程中,伺服电机会产生振荡。因此,需对伺服环路进行优化改进,增加了负反馈的差速抑制电路,将电机产生的速度差经比较器进行差值比较,将差值信号反馈给数值小的速度调节器,从而调节该电机速度,使电流输入信号趋于相同,达到抑制目的[2]。
1 伺服电机震荡机理
在基于对天线设备跟踪任务过程中出现的振荡特点及双电机驱动和速反馈速度环引用的基础上,发现在自跟踪任务中电机运动时出现的振荡,与双电机驱动的速差有关系。通过对伺服电机环路进行测试,在天线高仰角过顶或其他非匀速转动时会产生幅值波动相对较小、低频率、低阻尼的谐振频率。当该谐振频率与俯仰、方位转动时的速度频率相互叠加时,在短时间内无法自动消除,这种特点的频率叠加状态称为差速震荡[3]。
伺服电机在变速运动的过程中出现振荡,主要在于主电机转速增大时,电机带动的负载力矩增大,从电机速度低于主电机,抑制主电机使其减速;当主电机和从电机速度相同时,从电机的负载力消失。如此反复变速,在S/X自跟踪、程跟时就会出现振荡,在控制界面上的引导曲线就会出现上下波动的锯齿现象。在传统的天饲馈系统中,通常增加偏置力矩来改善双电机驱动产生的齿轮消隙,使得双电机无速度差,减少差速震荡的发生几率,但因电机器件的特性差异,优化程度有限[4]。
2 传统双电机驱动消息方法
通常在工程上,为了避免伺服电机带动齿轮产生的差速震荡,在天线的3个轴体均使用同一厂家、同一型号的宽调速直流伺服电机,同时2台电机的摩擦离合器、减速箱内部的末级齿轮均与天线主轴的大齿轮匹配啮合;通过在2台电机间施加一个偏置电流,从而在同轴的2组减速齿轮组间形成一个偏置力矩,使天线伺服系统在预置、高速过顶或过顶后减、归零时消除空转回程,即双电机驱动消隙。从而避免了因机械结构产生的电机驱动消隙造成天线无法进行准确跟踪。其原理框图如图1所示。
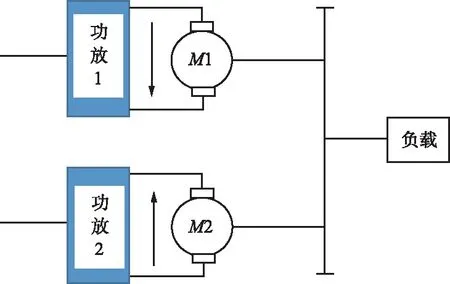
图1 双电机消隙原理框图Fig.1 Block diagram of backlash elimination principle of double motors
2.1 双电机消隙力矩偏置

图2 力矩偏置框图Fig.2 Torque offset block diagram
当Ug=0时,M2=-M1=M0,M0成为消隙(偏置)力矩值。
当Ug由0正向增加不太大时,保持M1,M2反向,仍能消隙,此时由2#电机拖动负载和1#电机前进。
当Ug正向增加到U0时,M1=0,1#电机在齿隙中游移。2#电机仍拖动负载,其齿轮箱不会出现齿隙,负载不会游移。
当Ug>U0时,1#电机穿过齿隙与2#电机共同推动负载,但M2>M1。
当Ug>U1时,偏置力矩开始减小。
要建立相应的管理制度,为人力资源优化配置提供政策依据和导向。深化干部人事制度改革,加快“三能”机制建设,建立干部交流工作制度,畅通企业之间的干部流通渠道。制定各类企业机构编制标准,特别是未来发现方向的分散式新能源、分布式能源的管理模式,安排和实施差异化、结构化、系统化的人力资源优化配置。建立企业内部人才市场,形成有序的员工流动机制。
当Ug>U2时,偏置力矩完全消失,2台电机以相等的力矩推动负载。
通过对力矩偏置进行分析,天线在反向运转时,1#电机或2#电机有一台输出力矩会提前转向,使得在一台末级齿轮脱离大齿轮的同时,另外一台末级齿轮不脱离,从而避免了天线调头时,齿隙和空转回程的产生[5]。
2.2 双电机消隙的电枢电流
双电机在实现消隙时通过反馈引入偏置电流,使其与电枢电流叠加,通过电枢电流与负载力矩的正比关系,使主从电机之间产生力矩差,从而使仓体外电机的末级齿轮与主齿轮啮合,实现消隙。其原理如图3所示。
图3在电流调节器的前端增加了消隙控制单元与速度调节器相连,将速度信号转换成幅值相同、方向相反的电流信号,与电机的反馈信号一同传输到电流调节器输入端,以此来控制电流环的输入,使2台电机之间产生力矩差,达到消隙效果。

图3 电枢电流框图Fig.3 Armature current diagram
2.3 双电机消隙的不足
虽然上述双电机驱动能够达到较好的消隙效果,但因电机内部构件的差异,难免会出现异常情况。
(1) 在天线预置或高速运动过程中,主从电机有一台电机经过总电枢电流等于零,此时对应力矩为零,末级齿轮与主齿轮之间会产生啮合间隙,造成齿轮滑动,引起差速振荡。
(2) 虽然同轴上的2台电机是同型号、参数值相同的,且元器件特性也相同,但在实际应用中,所发挥出的特性也会略有差别,速度环路所产生的信号不可能完全一致。若偏差太大,则会造成电机差速震荡,无法消除。
因此,为解决天线伺服在运转过程中出现上述差速振荡的问题,需通过差速震荡抑制的方法来消除设备故障[6]。
3 差速震荡抑制方法设计
3.1 差速振荡抑制方案构想
伺服天线中常用的和速反馈抑制方法将2台电机输出的速度信号取和后作为速度环的反馈信号,完成速度环闭环,如图4所示。
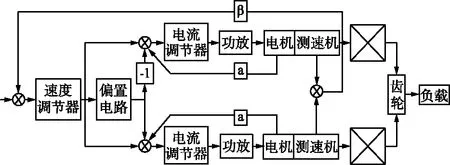
图4 和速反馈控制方法原理框图Fig.4 Principle block diagram of sum speed feedback control method
由图4可以看出,2台测速机输出的反馈和速度信号与指令速度信号做差后得到速度误差信号,再经速度调节器校正后同时加到2台电机的电流环输入端,同时驱动2台电机,实现2台电机转速同步控制。同时在速度调节器与2个电流环之间设置力矩偏置电路,通过力矩差来消除齿轮消隙。
在电机的运行中存在一定的局限性,主要表现为在电流变化过程中存在偏置电流与驱动电流相抵消的情况,引起差速振荡[7]。因此在和速反馈的基础上考虑增加差速反馈比较环路,形成具有差速反馈的反馈方案,解决和速反馈环路易出现的差速震荡问题。
引入差速反馈抑制差速振荡能够抵消振荡的阻尼力矩。对于速度调节器,为了避免2台速度调节器器件的差异造成电流调节器输入幅值不同,而影响速度环的控制。在速度调节器输出端增加比较器进行输出信号幅值比较,将比较信号补偿到速度调节器输入端,以弥补器件差异[8],原理框图如图5所示。
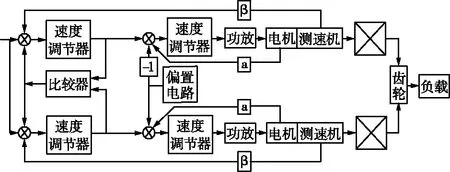
图5 负反馈差速震荡控制方法原理框图Fig.5 Principle block diagram of negative feedback differential oscillation control method
3.2 差速振荡抑制电路设计
差速震荡抑制电路如图6所示。
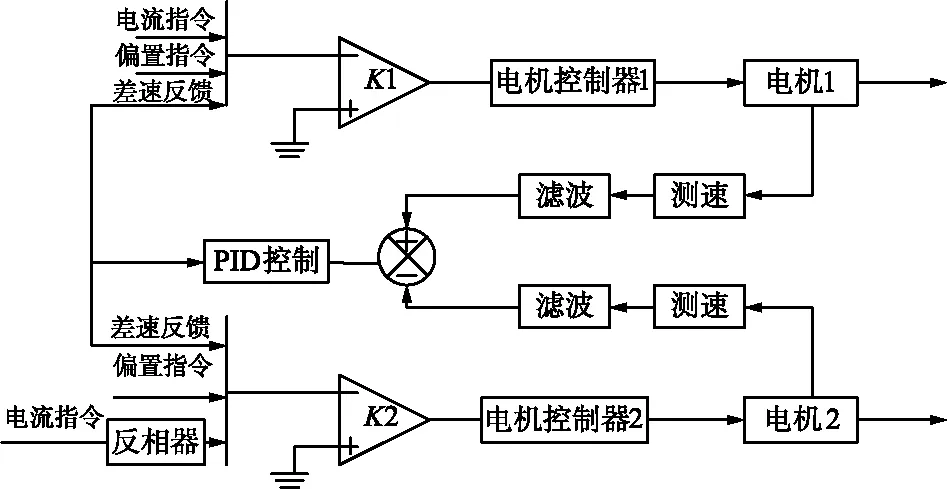
图6 差速震荡抑制电路Fig.6 Differential oscillation suppression circuit
本文采用共同速度环的方式对电流的输出进行指令控制,通过梯形偏置电路实现电消隙,主要是通过对主从电机驱动的偏置指令和差速反馈信号相位值取反实现。此处主要采用电枢反接的方式使实际相位值相反,但同时要注意由于电枢反接,为保证2台电机同向转动,对输出电流指令取反相。
差速反馈通常采用的方式有PI和PID两种,为了更好地限制超调量,采用PID进行控制,由于系统中存在高频干扰,不利于控制,所以在PID调节器前引入滤波电路进行滤波。PID调节器原理如图7所示。
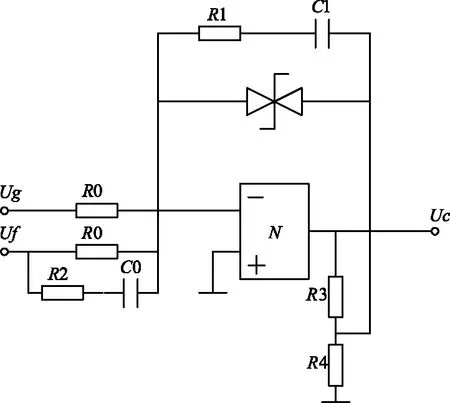
图7 并联PID调节器原理Fig.7 Principle of parallel PID regulator
图7中,N与R1,C1和R2,C0构成了PID控制器,Uc输出信号直接接入2台电机各自的电流环输入端,与电流指令信号和偏置指令信号一起作为电流环的输入[9]。对该系统增加差速反馈信号输入如图8所示。
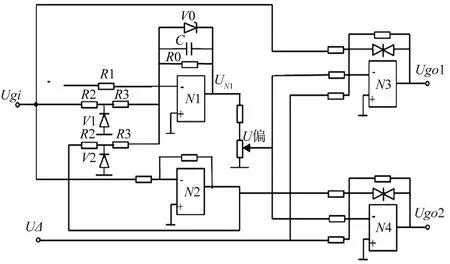
图8 差速抑制电路Fig.8 Differential suppression circuit
在双电机驱动差速抑制的实际电路设计中,应考虑以下2个方面:
(1) 从2台电机的测速机提取出的差速振荡信号应是相减的,经过滤波之后从N1输入;
(2) 采用带通滤波器和电位器解决测速机之间的非线性和灵敏度不一致问题。
通过以上工作,完成了双电机驱动差速抑制电路的参数选择与调试和电路的设计。
3.3 差速振荡抑制性能仿真
完成对差速负反馈震荡抑制电路的参数选择和电路改进后,对和速反馈抑制的速度环阶跃响应和引入负反馈、比较器的差速速度环阶跃响应进行仿真,如图9所示。
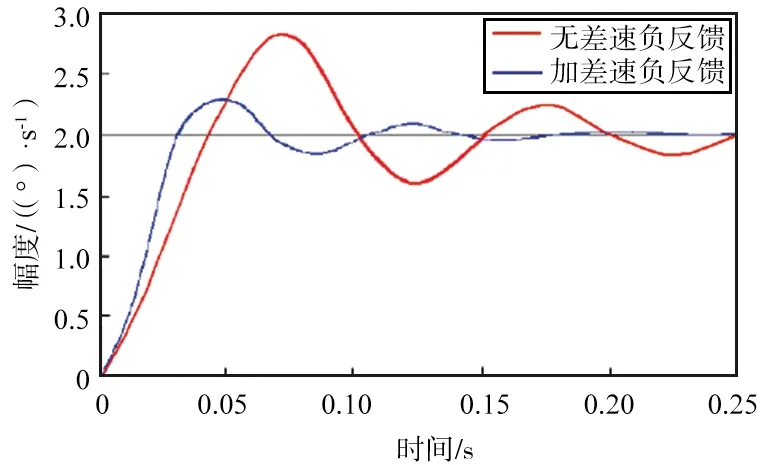
图9 差速抑制性能仿真Fig.9 Simulation of differential suppression performance
通过对比可以看出,改进后的速度环阶跃响应上升时间较改进前明显缩短,调整时间宽度较改进前明显缩短,振动幅度明显变小。改进后速度环的实时性、稳定性较改进前有所提高。
4 结束语
随着对双电机消隙方法的深入研究,齿隙电消隙技术日益成熟,使多电机驱动技术广泛应用于高精度的天伺馈系统中。然而在常规数据接收任务中,因器件的差异特性及设备运行中出现的特殊情况导致的差速振荡偶有发生,促使差速震荡抑制方案不断改进、抑制电路不断改进和优化。本文针对原有的差速抑制电路进行改进优化,同时分析了差速震荡的机理及电消隙方法,通过比对消隙力矩和消隙电流的变化特点进行了深入剖析,指出了和速反馈方法对差速振荡抑制的不足,在原有和速反馈基础上保留原偏置电路,提出引入差速负反馈,在速度调节器输出端增加比较器,用于速度差补偿,并仿真验证了该方案对速度环路性能改进的可行性。
本文研究讨论的消隙方法、差速震荡抑制方案,既有深入的理论剖析,又有仿真实验,验证了方案的可行性,对常用的固定式或移动式伺服设备优化改进具有一定的参考价值。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国特种设备安全(2022年2期)2022-07-08
中国信息化(2022年5期)2022-06-13
宇航计测技术(2018年3期)2018-09-08
电子制作(2017年13期)2017-12-15
山东青年(2016年12期)2017-03-02
北京航空航天大学学报(2016年6期)2016-11-16
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
汽车与新动力(2015年1期)2015-02-27
