
风云四号系列卫星测定轨系统及自动运行设计
2021-10-15 04:06李欢
无线电工程 2021年10期
李 欢
(西安科技大学高新学院 信息与科技工程学院,陕西 西安 710109)
0 引言
气象卫星在气象、减灾、海洋、林业、农业、民航和交通运输方面具有十分重要的地位。按所在轨道可分成2类:太阳同步轨道气象卫星(也称“极轨道气象卫星”)和地球静止轨道气象卫星。其中静止轨道气象卫星可对覆盖地球近1/3的地区进行观测,实时将观测数据发回地面。其轨道测量、确定和预报精度不仅用于卫星自身轨道保持和姿态控制,更重要的是影响遥感图像的精确定位处理结果[1]。
当前,对于单颗静止气象卫星均建设有专用的测距和定轨系统为其提供时、空上的独占式服务。当出现东西分布而且跨度大的多颗卫星时,如果还采用传统独占服务模式,将造成巨大的地面资源冗余和浪费。针对该问题,本文通过分析测站布局、观测方案和定轨精度等影响,提出增建一套测距定轨系统的必要性,并通过设计智能、自动化运行方案,保证2套测距定轨系统对多颗卫星进行测距、定轨作业的高效、可靠运行[2]。
1 风云四号地面系统及系列卫星测定轨能力分析
风云四号A星是新一代静止气象卫星的首发星[3],测距和轨道确定系统由卫星转发器、北京(含测距作业控制和轨道确定软件)或广州主站、乌鲁木齐、佳木斯和腾冲(每站一套测距设备)3个测距副站组成,如图1所示。

图1 风云四号A星测距系统Fig.1 FY-4 A satellite ranging system
测距系统的工作原理是:主站和副站同时向卫星发送测距信号(码分多址),通过卫星转发回地面,测量信号上、下传输时间,然后乘以光速即可得到地面到卫星的距离。测距采用L和S频段(均为国际电联划分),这些频段的无线电波受电离层的折射影响较大,为了像GPS和北斗卫星导航系统那样消除电离层折射误差,风云四号测距下行采用了L和S双频。通过双频段测量地面已知5个地面站到卫星的距离,列出的测量方程为[4]:
i=1,2,3,4,5,
(1)
式中,x,y,z为卫星的位置信息;xi,yi,zi为地面站的位置信息;Ri,S为地面站i—卫星—地面i下行频率为fS(S波段)的伪距观测值;Ri,L为地面站i—卫星—地面i下行频率为fL(L波段)的伪距观测值;Ri,0为地面站i到卫星真实距离值;TECi为测站电离层电子浓度总含量;RS,sat,RL,sat为S波段和L波段的卫星转发时延;Ri,S,zero,Ri,L,zero为测站i的设备零值。
通过式(1),可以求解出电离层造成的时延(5个未知数TECi,i=1,2,3,4,5)、卫星转发器时延(2个未知数RS,sat,RL,sat)以及卫星的坐标(3个未知数x,y,z)[5]。
多个测距站的布局主要是为了提高定轨精度和速度,同时也可以相互备份提高系统的可靠性。风云四号A星主要承担科研试验任务,地面测距设备均是单套配置。
1.1 测站布局对风云四号系列卫星覆盖能力分析
按照风云四号卫星发展计划,不仅要发射光学卫星,还要发射微波探测卫星。根据气象观测的需求,将采用东西双星布局,为了保证观测业务的连续、稳定,采用卫星在轨备份方式。为此,我国向国际电信联盟申报了7个静止轨道位置:79.0°E,86.5°E,99.5°E,105.0°E,112.0°E,123.5°E和133.0°E,形成静止轨道卫星组网的工作状态,以提供更好的服务[6]。
测站至卫星的方位角如图2所示。

图2 测站至卫星的方位角Fig.2 Azimuth from station to satellite
论证现有测站布局对风云四号系列卫星的覆盖能力,需要以风云四号A星已经建成的测站为基础,计算每个测站天线对每颗风云四号卫星的方位角与俯仰角,计算方法如下[7]。
已知条件:测站的纬度ФG和经度λG;卫星定点轨道星下点的纬度ФS和经度λS;卫星高度h。
求测站指向卫星的方位角A(从正北算起)[8]。从图2中的球面三角形NGS,可得:
(2)

cosL′=sin ФGsin ФS+cos ФGcos ФScos Δλ。
如果画出一个以测站为中心的水平日晷投影地图,则可以从图上直接得出观测卫星的方位角。在这种地图上,测站作用范围是圆,卫星通过测站上空的星下点轨迹是直线。从测站(中心)画直线到轨迹上的一点,它与正北之间的角度便是方位角[9]。
测站至卫星的俯仰角如图3所示。
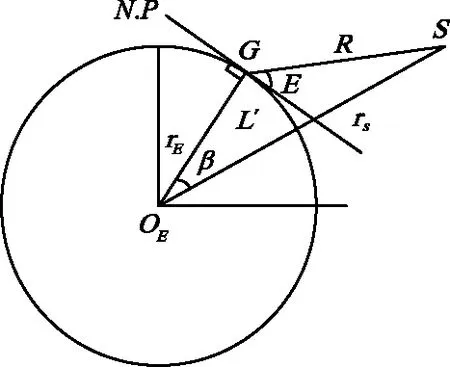
图3 测站至卫星的俯仰角Fig.3 Elevation from station to satellite
求测站指向卫星的仰角E[3]:
(3)
式中,β=L′。依据rs+h各测站天线观测风云四号系列卫星的方位、俯仰角结果,如表1所示。

表1 各测站天线观测风云四号卫星的方位(A)、俯仰角(E)Tab.1 Azimuth (A) and elevation (E) of satellite observed by antenna of each station
从表1可以看出,以当前的测站布局,各测站的天线对于上述7个静止轨道的卫星均是可见的,现有测站布局能够对风云四号系列全部卫星实现测距定轨功能。
1.2 测站布局对风云四号系列卫星定轨精度分析
根据跟踪卫星和无线电信号转发,当前的测站可以支持7个轨道位置卫星测距。但是这对于基于测站布局的几何法定轨,尚存在不足。5个测站分别对东、西卫星测距的关系如图4所示。
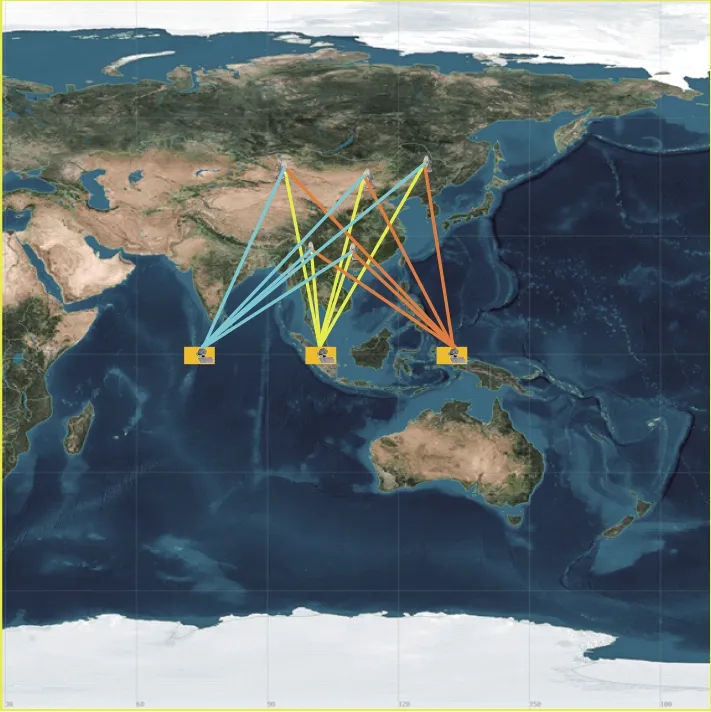
图4 地基多站多星测距系统Fig.4 Ground-based multi-station multi-satellite ranging system
需要分析现有测站布局对风云四号系列卫星定轨精度的影响,判断现有测站布局是否满足风云四号系列卫星定轨精度需求[10]。
测站几何分布对定轨精度的影响通常用几何精度因子(Position Dilution Precision,PDOP)来体现,这是衡量多站测距定轨精度的一个系数,是测量误差造成的测站至卫星距离矢量的放大因子。地面测站分布与卫星所形成的空间体积与PDOP成反比,测站在星下点周围分布越开阔,越均匀,PDOP越小,对定轨精度的影响就越小[2]。下面给出PDOP的计算方法[11]:
权系数阵QX:
QX=[ATA]-1,
式中,A为误差方程的系数矩阵。
QX也可以表示为:
位置精度衰减因子PDOP可由下式计算:
按照卫星轨道位置为79°E,105°E和133°E,计算5个站布局的PDOP值[12],并仿真与其相应的条件下的定轨精度,仿真过程如下:
① 由卫星状态量和严格力模型外推,模拟一条真实轨道,并根据观测方程模拟含有随机噪声和系统噪声的观测数据文件。
② 采用批处理(加权最小二乘)方法解算初始时刻的轨道改进量。
③ 在每个历元点,解算出的轨道与模拟的真实轨道作差,并通过下式求解定轨精度:
式中,σ为定轨精度;N为历元个数;Δi为解算轨道与真实轨道之差。
④ 为了保证实验结果的可信度,采用蒙特卡罗统计模拟方法仿真100次加入随机误差的观测数据,重复步骤①~③,取100次结果的统计平均作为该组实验的轨道精度。仿真结果如表2所示。

表2 测站组合定轨精度仿真结果Tab.2 Simulation results of combined orbit determination precision of stations
由表2可以看出,利用现有布局的测距站,对于规划中不同位置的卫星所构成的PDOP差异并不大,定轨精度差异也不大,可满足要求。
1.3 现有测站对风云四号系列卫星的可用性分析
测距是卫星轨道确定及预报的基础[13]。目前,一颗卫星一天之中有等时间间隔的8次测距即可较高精度地确定轨道参数。但是需要在卫星执行飞轮卸载后及时进行测距和定轨,然后尽快安排第2次测距,以提高定轨精度。如果按在轨7颗卫星计算,每颗卫星每天测距10次(8次常规+1次卸载+1次加密)计,共需要70次测距作业。
根据以上分析,若在7颗卫星共用一套地面测定轨系统的情况下,相当于每20 min天线要从指向一颗卫星运转到指向另一颗卫星,由于卫星东、西布局跨度较大,测距设备天线需要不断地往返运动。天线工作在室外,受环境影响大,是测定轨系统中故障率最高的部分,而且不同于室内电子部件,维修不便和时间较长[14]。
因此,按照多颗卫星测定轨可靠性要求,每站配置2套测距设备是必要的,可以互为备份,统一调度以提高系统的可用性。在配备2套测距设备的情况下,每个站需要配置站控实现对2套设备的监控和调度。站控与2套测距设备之间是互联互通的,避免一套设备故障导致信息无法传送。
2 双地面测定轨系统自动运行方案设计
为了实现双地面测距定轨系统对风云四号系列卫星全覆盖自动作业,同时达到无人值守的要求,本系统的自动化运行方案采用任务管理与控制中心(MCS)、主站站控(MRS)、副站站控(SRS)和设备监控这4级监控方式,双地面测距定轨系统在任务管理与控制中心的指挥和调度下运行[5]。MCS每天根据卫星的运行情况自动生成测定轨系统的任务时间表,主站接收并解析后通过卫星分发给各个副站,每个副站按照时间表自行运行,副站测距过程中将本副站设备的状态及测距结果通过卫星转发的方式实时发回主站。主站利用各站数据进行轨道确定及预报,然后将轨道数据、设备状态上报MCS,需要使用轨道数据的系统从MCS自行提取[15]。
系统总体的工作流程如图5所示。

图5 系统工作流程Fig.5 System flow chart
2.1 控制中心对主站的控制方案设计
地面测定轨系统作为静止气象卫星地面应用系统的一部分,在控制中心的指挥和调度下运行。控制中心在每天固定的时间向地面测定轨系统主站站控下达当天的作业任务,控制中心也可以根据需求添加临时任务或取消某一时间的任务。作业任务的参数包括卫星代号及轨道位置、每次任务的开始时间和结束时间等。设定7个轨道位置均有卫星,即满负荷工作,每日作业任务如表3所示。
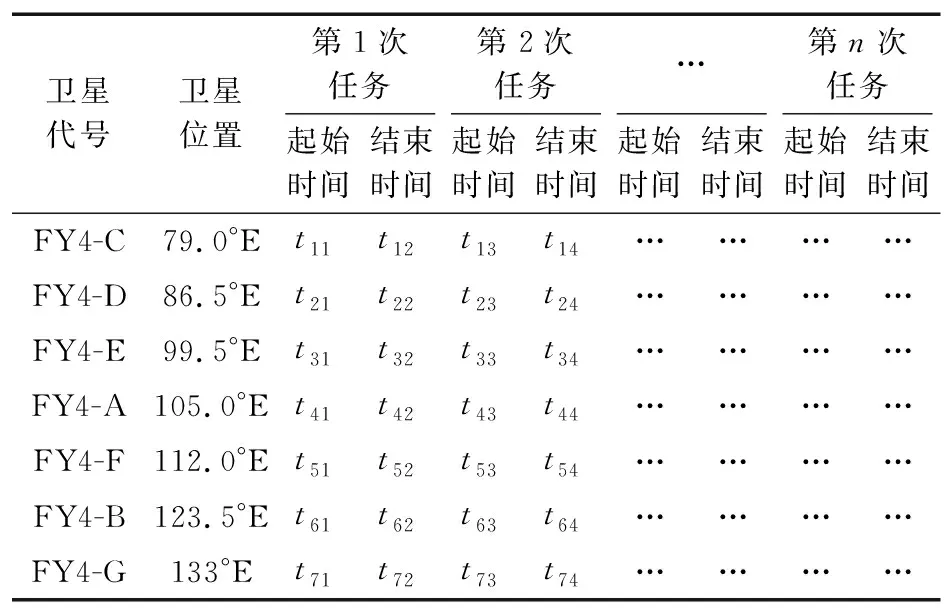
表3 控制中心每日下达给测定轨系统的作业任务表Tab.3 Daily task list issued by control center to orbit determination system
2.2 主站与副站之间的信息传输方案设计
主站将接收到的作业任务调制在上行测距信号中,在测距时通过卫星向副站发送作业任务;副站在测距的同时解调卫星转发的主站信号,获得主站下发的作业任务表[16]。
每个副站将该站对卫星测距的距离值、距离值时刻、设备工作状态等信息按照一定的格式装载在上行信号的基带数据中,经过卫星转发给主站。主站在进行卫星测距的同时,解调卫星转发的4个副站的信号获得每个副站的测距值和状态信息;基于卫星转发的主站与副站之间的信息传输方案,如图6所示。
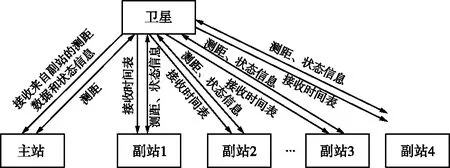
图6 测距主站与测距副站之间的信息传输方案Fig.6 Scheme of information transmission between master and auxiliary ranging stations
2.3 站控对测距设备的控制设计
每个测站均配置2套测距设备,每个站都设有一个站控,MRS除了接收MCS下达的测定轨任务、对副站运行进行监控外,还要对主站的2套设备进行作业调度和监控;SRS监控2套设备的运行,根据任务和设备的状态对2套设备的运行进行作业调度。每个站的2套设备同时接收任务时间表,以便一套设备工作出现故障时及时切换到另一套设备工作,由站控控制哪套设备执行任务。测距设备与站控之间的关系如图7所示。
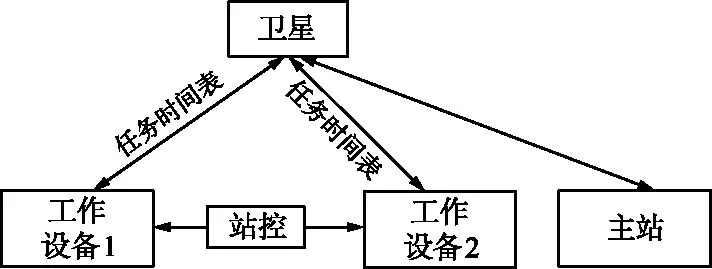
图7 测距设备与站控之间的关系Fig.7 Relationship between ranging equipment and station control
2.4 地面测定轨系统的测距作业流程设计
2.4.1 主站测距作业流程
主站接收MCS的任务时间表,解析后通过卫星分发给各个副站。在进行作业前,站控决策调度设备1工作还是设备2工作。2套设备同时收到任务时间表,这样在一套设备故障时,另一套设备及时根据任务时间表接续工作。再判断各个副站是否均有信号,若其中有副站没有信号需要判断当前测距组合是否有效,如异常,系统将报警提示。在进行测距作业的过程中,如果采集到的数据出现异常,也会及时报警[8]。主站测距作业流程如图8所示。

图8 主站设备作业流程Fig.8 Operation flow chart of master station equipmen
2.4.2 副站作业流程
副站站控选定一套设备工作,从任务表中读取下一次作业的卫星位置,计算天线将要指向的目标方位角和俯仰角;读取当前天线指向的方位角和俯仰角,根据天线方位运动速度计算从当前方位角到目标方位角所需时间,同样计算俯仰运动所需时间,取它们中的最长时间;读取下一次作业对应的起始时间,设定各站测距天线在下一次测距作业开始前2 min到达指定卫星所对应的位置,与系统时间比对,判断天线转动时间是否到;如时间到,控制天线转动到达目标位置,并打开发射机;读取结束时间,与系统时间比对,判断是否结束;结束时间到,完成本次测距。副站作业流程如图9所示。

图9 副站设备作业流程Fig.9 Operation flow chart of auxiliary station equipment
3 结束语
针对未来分布跨度大(79°E~133°E)的7颗新一代静止气象卫星需要进行测距定轨作业的需求,利用现有的地面测站布局,通过计算卫星测距的几何因子,仿真分析现有测距定轨系统对7颗卫星定轨精度,得出现有测站布局满足未来7颗气象卫星的定轨精度需求的结论;通过对单套测距定轨系统运行能力、高精度定轨对测距数据量需求的分析,论证了每个测站增加一套测距设备的必要性,2套测距定轨系统能够很好地解决多星测距作业任务需求,并对卫星的测距任务的生成、下达和执行架构进行了设计,详细设计了任务管理与控制中心和主站、测距主站和副站之间的信息传输方案,对测距测定轨系统主站及副站工作流程进行了详细设计,提出了全系统自动监控、故障分级的设计思路,保障双地面测距定轨系统高效、可靠运行,以期为新一代气象卫星观测系统的发展提供有益的借鉴和参考。
猜你喜欢
地理空间信息(2022年11期)2022-11-26
测绘地理信息(2022年2期)2022-04-02
上海航天(2021年5期)2021-11-08
陕西水利(2021年5期)2021-06-21
中国水能及电气化(2019年10期)2019-11-07
童话世界(2019年25期)2019-10-26
机电信息(2018年36期)2018-12-21
组合机床与自动化加工技术(2017年1期)2017-02-15
电子制作(2017年23期)2017-02-02
棋艺(2016年4期)2016-09-20
