
智能楼梯间货物载运车的设计与实现
2021-10-23 04:06李重阳赫世敬米龙阁刘卫通白轶华汤吉浩
新型工业化 2021年7期
李重阳,赫世敬,米龙阁,刘卫通,白轶华,汤吉浩
(河南理工大学,河南 焦作 454003)
0 引言
随着经济的发展和人民生活水平的日益提高,我国城镇化水平不断提升,越来越多的群众入住中高层建筑。但建筑楼层的增加也给群众的日常生活带来了一定的困扰。电梯受空间以及结构限制,基本只能实现人员的进出和轻便物品的载运,不能很好地保障重物的载运。若在电梯里放置过重物品,可能就会使电梯出现运行问题,并对人员和货物的安全造成威胁,因此很多时候只能通过楼梯进行人工搬运。在没有电梯的建筑中,上下楼梯时住户往往会因携带较多物品而感到不便,尤其是重物的搬运会极大地增加工作强度。
1 智能楼梯间货物载运车总体设计
1.1 功能设计
本产品采用多元化一体式设计。基于人性化、实用化的原则设计的这款升降式货物运输产品,利用剪叉式升降结构确保车身在运输时始终与地面平行,如图1所示。为减轻车身重量,车体外壳主要采用ABS塑料,核心承重部件的材料为结构钢材。车体前后设有扶手,车上安装有载物箱。车身设有分层式高度调节机构,以调整车体整体高度,如图2所示。将剪叉式升降结构和控制系统相结合,实现了载运车一次可上升单层、多层楼梯的功能。本产品主要用于运载尺寸中等、重量小于200kg的货物或用于运输餐盘等,利用双控制系统——单片机智能控制系统和闭环直流电机调速控制系统,能显著提高货物运输效率、载运车实用性与自动化程度。既提高了货物运输效率,又保证了货物的安全。
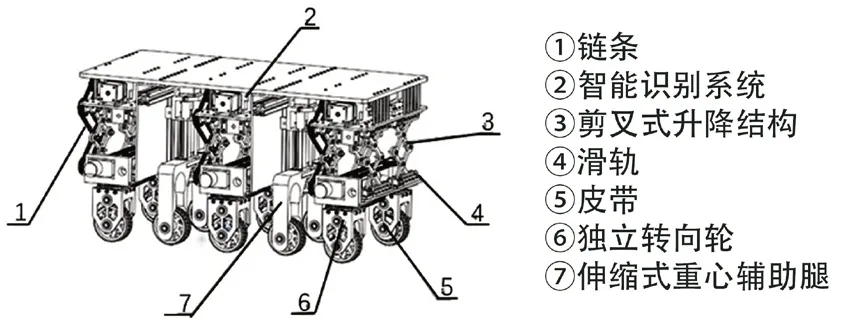
图1 智能楼梯间货物载运车内部立体图
1.2 产品组成部分
主体结构如图2所示,智能楼梯间货物载运车的主要组成部分有:立式载物箱、剪叉式升降结构、伸缩式重心辅助腿、独立转向轮。

图2 智能楼梯间货物载运车外观设计图
动力源:蓄电池。
智能识别控制系统:超声波检测系统、激光模块、红外模块、STM 32RCT6单片机主控系统、陀螺仪、摄像头导航系统。
应急处理装置:双控制系统设计——单片机智能控制系统和闭环直流电机调速控制系统。
1.3 攀爬楼梯结构设计
利用剪叉式结构升降原理[1],结合滚珠丝杠、齿轮传动结构,使攀爬腿实现升降。将载运车上方电机的差速驱动力传输到滚珠丝杠上,滚珠丝杠与剪叉式结构合理配合,将剪刀撑侧壁间夹角减小,达到提升的目的,下降与上述相反。由于剪叉式升降作业平台的升降高度可任意调节,所以载运车既能一次攀爬一节楼梯也可一次攀爬多节楼梯。
1.4 重心平衡结构设计
在载运车升降过程中,若没有辅助装置因重心必定前倾,造成安全问题。为解决载运车在攀爬楼梯过程中,载运车重心位置发生变化而翻倒,创新性地设计出伸缩式重心辅助腿机构,巧妙利用丝杠光杆结构,使伸缩式重心辅助腿在攀爬腿提升(下降)时,可以下降(提升),保持载运车重心处于安全的位置,从而解决重心前倾的问题。
1.5 独立转向轮结构设计
转向轮与载运车整体是相互独立的,腿部下方的独立转向轮通过齿轮链条传动使转轮转动90°而载运车整体车身不动,以实现在狭小楼梯处转向。
1.6 动力多级利用结构设计
载运车上方的大扭矩电机为载运车提供升降动力,载运车需要升降时,与液压伸缩杆相连接的锥齿轮在伸缩杆的推动下与电机相连接的锥齿轮接触,使下方与剪叉式结构配合的丝杠转动,从而使载运车升降。将链条链轮固定在剪叉式支撑臂上,解决变距动力传输问题,将电机动力传输到载运车下方移动轮,为其提供前进后退动力,减少电机数目,达到动力多级利用。
2 智能楼梯间货物载运车智能工作原理
2.1 智能楼梯间货物载运车工作流程
载运车采用立体式载物箱存放货物,利用安装在独立转向轮上的激光测距模块来实时检测载运车与楼梯间的距离,将激光测距模块的数据实时传输给控制器(STM 32F103单片机控制板)[2]来判断载运车是否进行升降操作,激光测距模块对楼梯间距离测量的准确率达毫米级别。同时利用伸缩式重心辅助腿的降升来稳定载运车重心。此时平衡仪(MPU6050陀螺仪)将载运车的水平度实时传给单片机控制器,控制器判断是否进行平衡调整,陀螺仪调整载运车倾斜成功率达99%以上。考虑到楼梯转弯处比较狭窄,本团队采用独立转向轮设计,在转弯过程中,转向轮进行90°转向,但载运车整体车身保持不动,从而实现载运车在狭窄空间处稳定转向的功能。为了减少电机的使用,本团队将链轮链条附着在剪刀撑侧壁,使剪叉式升降结构的动力传输给独立转向轮,从而实现变距动力传输,不仅减轻了载运车的重量,而且降低了控制的难度。工作流程如图3所示。

图3 智能楼梯间货物载运车工作流程图
2.2 激光测距流程
激光测距模块使用脉冲法测量距离[3],测距仪发射出的激光脉冲被测量物体反射后又被测距仪接收,测距仪同时记录激光往返的时间。通过内部算法D=CT/2n,计算得到距离数据。采用激光脉冲测距法使结果精确到毫米级别,极大提高了测量的准确性。将距离信号传输给单片机,当距离小于设定值时,单片机输出信号,载运车进入攀爬楼梯模式。
2.3 平衡仪流程
MPU 6050陀螺仪的芯片内部集成了数据处理子模块DMP,可对传感器得到的加速度及平台倾斜角度进行数据滤波、整合处理,并将结果直接输出给单片机,单片机通过数据判断平台是否倾斜,并自动控制相应电机进行平衡调整[4]。
2.4 智能楼梯间货物载运车应急处理系统
采用双控制系统设计方案(左右脑),单片机智能控制系统以及闭环直流电机调速系统共同协作控制设备,规避某一系统故障造成的风险,也可对意外情况进行更快更好的处理。双控制系统中任一系统出现故障时,1s内停止该系统,由另一系统控制设备继续平稳运行[5]。可在2s内启动中断服务程序,处理意外情况的准确率可达99%以上。单片机智能控制系统以单片机为主控制核心,内部烧写程序,根据检测信号自动输出控制信号,维持载运车智能化运行;闭环直流电机调速系统由转速负反馈和电流负反馈组成,实现串级连接,维持自身电机转速的稳定。
3 结语
建筑楼层的增加标志着我们生活水平的升级,但也在无形中给我们的日常生活带来困扰。传统人工搬运重物上下楼梯,效率低,并且长期搬运容易对搬运工人的身体造成伤害。本产品通过改善现有货物运输设备所存在的缺陷,有效解决楼梯间货物运输问题,实现高效自动化运输,为运输人群提供更安全、更高效、更实用的工具。
猜你喜欢
北京文学(2022年3期)2022-03-11
暖通空调(2021年6期)2021-12-28
暖通空调(2021年5期)2021-06-02
环球时报(2020-11-14)2020-11-14
数据采集与处理(2020年2期)2020-05-26
制造技术与机床(2019年11期)2019-12-04
科技资讯(2018年10期)2018-10-26
小天使·一年级语数英综合(2017年3期)2017-04-25
通信电源技术(2016年1期)2016-04-16
深圳职业技术学院学报(2015年5期)2015-11-30
