动态精密工程测量技术及应用
2021-10-27 01:00李清泉张德津汪驰升陈智鹏
测绘学报 2021年9期
李清泉,张德津,汪驰升,陈智鹏,涂 伟
1. 深圳大学广东省城市空间信息工程重点实验室,广东 深圳 518060; 2. 深圳大学自然资源部大湾区地理环境监测重点实验室,广东 深圳 518060; 3. 深圳大学深圳市空间信息智能感知与服务重点实验室,广东 深圳 518060
21世纪以来,我国工程建设突飞猛进,工程建筑物规模迅速扩大。截至2019年,我国高速公路通车里程增长至142 600 km,高速铁路通车里程35 000 km,摩天大楼超过100栋,公路隧道和铁路隧道超过35 000座,跨江大和跨海大桥数百座。这些大规模工程建筑物的服役状态不断发生变化,变化超过一定限度时将会引发事故,威胁人民生命财产安全。因此,必须对重大工程建筑物的几何形状和物理属性进行高精度、高频次精密测量,以精准评估其服役状态[1-5]。
传统精密工程测量一般通过精心布设平面控制网或高程控制网,在若干重要位置处布设精密测量仪器,进行空间抽样测量,自动化程度低,测量成本高,难以实现全覆盖、高效率、高精度的工程结构物服役状态检测[6]。例如,道路弯沉是表征道路承载能力或结构强度的重要力学指标,反映路面使用性能。传统方法一般通过贝克曼梁法测量道路弯沉,通过对路面施加一定的载荷力,使路面充分变形后移除载荷,测量路面回弹弯沉,测量效率较低,约为1~3 km/h,而且需要封闭道路,如果将我国高速公路道路弯沉全部检测一次,需要近百台设备,近千人,连续工作一年,并且难以实现空间连续的普查检测[2]。弯沉动态连续测量是实现解决问题的有效途径。加上一些工程建筑物在提供服务时不可被干扰,留给运营维护的窗口时间非常短。高速铁路每天都有上百对高速列车通过,只有2~4 h的时间窗口进行高铁轨道检测,其日常检测若要求无缝覆盖全部高铁轨道,仅武广高铁每晚就要有上千人上路检测,在高铁沿线布设固定检测设备成本高昂,难以承受[3]。因此,必须将测量仪器安装在沿着高铁轨道行驶的检测平台上,进行动态测量。
随着工程科技、计算机、电子信息和人工智能的发展,智能车、无人机、无人船、机器人等自动化移动平台的快速普及,工程测量逐渐向自动化、动态化、智能化方向发展,逐步具备了运动状态下的测量能力。动态精密工程测量指的是测量平台或测量对象处于运动状态下的精密工程测量[7]。测量平台指的是布设测量仪器的基础平台,包括固定精密测量仪器的基座,例如:移动车辆、无人机、舰船、机器人等,以及安置在平台上的多种测量仪器和传感器。被测对象指的是被观测的对象,例如:建筑物、桥梁、隧道、道路、大坝、管道等。与传统精密工程测量不同,动态精密工程测量通常指测量平台或者测量目标这两个要素中至少有一个是运动的。动态精密工程测量的测量平台既可以成熟测量设备,如测量机器人,移动测量车等;也有研制专用集成测量装备,可进行精密动态的位置、姿态、表观形状或内部状态测量。后者的位置和姿态测量主要靠集成高精度全球导航卫星(GNSS)接收机、惯性传感器(IMU)、里程计、跟踪仪等传感器来实现;表观测量则主要采用高清可见光或红外相机、激光雷达、线结构光测量传感器等;内部测量主要采用探地雷达、多波束声呐、管线机器人等传感器来实现。集成测量装备通过快速获取目标对象的多源几何和非几何数据,利用智能化数据处理方法进行高效处理和识别,从而实现目标对象的变化特征测量,在此基础上对测量目标的状态进行评估和分析,为其安全运行和维护提供可靠依据。动态精密工程测量已经广泛用于大范围的公路铁路、桥梁隧道、水利枢纽等精密工程测量[6-9]中。本文针对动态精密工程测量的智能化感知技术、智能化数据处理方法及其在公路、铁路、桥梁、隧道、大坝等工程中的应用展开论述。
1 智能化信息感知
为精细而高效测量目标对象的位置、形状、纹理、材质等特征,动态精密工程测量需要根据适当的载体平台和配套系统,集成多种类型传感器,形成多传感器集成的动态测量系统,实现对目标的多源、多视角、多尺度智能感知。其中,测量装备专业化、感知自动化、数据标准化是当前智能化信息感知的研究热点和发展趋势。
1.1 感知场景需求
公路、铁路、桥梁、隧道、大坝、地下管网等工程结构物形面尺度多变(例如:尺寸从厘米至千米)、形态复杂、空间分布广泛、病害形式多样、观测环境恶劣且时间窗口受限(例如:高铁有效观测时间仅为凌晨3~4 h)等固有的复杂性,对精密测量提出了巨大挑战[10]。根据病害发生的位置,可分为内部病害和外部病害;根据病害的结构影响,可分为结构破坏和表观损坏;根据病害的表现形式,可分为几何形状变化和表观性状变化;根据病害影响分布,可分为大范围病害和局部病害等。病害成因机理不同、表现各异,因此,针对不同病害特征,应采取不同技术进行测量,表观的形变可采用三维技术,性状变化如表观破损、温度变化等可采用摄影技术[11],对于大范围病害如桥梁变形可采用雷达干涉测量(InSAR)技术等[12]。这些测量技术采用不同传感器,采集的数据也表现为不同格式。如图1所示,激光雷达、多目摄影测量及结构光测量等技术测量可采集不同场景和精度的点云数据[13-14],线阵或面阵等相机组合可获取高质量可见光获红外图像数据,合成孔径成像传感器可以获得SAR图像数据。

图1 智能化感知多源数据类型Fig.1 Intelligent sensors for multi-source data acquisitions
智能化感知需要根据不同测量需求选择测量方法和传感器,研制专用测量装备以适应特定的测量需求。例如,公路、铁路等设施为条带状分布,待测指标多,精度和效率要求高:公路要求测量破损、平整度、车辙等指标,路面裂缝要求1 mm分辨率,速度要求80 km/h以上;铁路轨道要求测量轨道板、轨距、轨廓、扣件等,高铁轨道扣件要求亚毫米精度,轨道综合动检要求达到300 km的正常行车速度等[15-16]。因此,动态测量一般采用车载移动测量方式,集成惯导、相机、红外热像仪、激光雷达和线结构光等多种传感器[17],在统一的时空基准下感知对象的多源数据,进行融合建模。一些基础设施如堆石坝,不仅存在外部变形隐患,也可能存在内部变形隐患。外部变形一般选用GNSS组网监测,内部变形往往采用预埋刚性管道保护的钢丝位移计等方法,应用表明传感器存活率偏低,而采用预埋柔性管道的测量机器人系统是未来测量的一个好的选择。此外,电力、市政管道、桥梁、隧道等基础设施也都需要选用特定的传感器,有针对性地研制专用装备。可见,多传感器集成的专用化的测量装备是智能化测绘发展的必然结果。
1.2 感知时空基准
多传感器集成不仅要解决不同传感器之间存在的电气属性、工作特性、数据协议等差异的问题,更重要的是,要求传感器测量的数据能准确描述时间和空间信息[17-19]。例如,路面检测使用线扫描相机获取路面图像,间隔1 mm采样;使用线结构光测量车辙,间隔10~100 mm采样;使用加速度计与测距机结合测量平整度,以固定周期采样,采样间隔与行驶速度相关。准确描述各传感器数据的获取时间和空间位置,则需要建立一个统一的时间和空间基准,以同步所有传感器数据。对于任何一个传感器而言,每次获取一个新的数据则和最新的时间和空间基准进行关联。不同数据时间和空间维度粒度的不一致时,可以根据实际需要进行内插和外推,从而实现高动态环境下高频采样的时间和空间的精确传递。
专用测量装备往往由不同的机构研制,输出的数据格式往往不对外公开。一个工程如果采用多类测量装备,就需要多种软件配合,导致作业人员需要不断地学习各种装备操作、软件使用及升级,反复转换数据格式,严重影响作业效率和效果。多传感器集成除了建立多传感器的同步与控制标准,还需要制定集成后设备输出的数据格式标准,做到测量装备专业化、感知自动化、数据标准化。
1.3 专用测量装备
在不同应用场景下,测量装备从功能到形态都会有较大差异,但装备研制技术路线有着共同特性:首先,装备需要基于特定的装载平台,如汽车、机器人、飞机(有/无人机)、列车、卫星等;其次,需要集成一种或多种类型传感器以实现数据感知和定位定姿;再次,需统一多类型传感器的时间和空间基准;然后,研发特定的传感器控制设备和数据采集与处理软件;最后,根据行业测量实际需求进行装备研发、装备标定和检定环境建设等,如图2所示。

图2 测量装备逻辑结构Fig.2 The schematic map of the surveying devices
以当前典型的公路、铁路移动测量装备为例,主要集成全景相机、多目相机、激光雷达、线结构光等传感器,采用里程计、GNSS与惯导组合进行定位定姿,其联合解算可提高空间定位精度。此时,多传感器同步控制设备输入定位定姿传感器信号,利用里程计输入信号计算载车移动的里程信息并作为触发基准信号,为以距离外触发工作的传感器生成外触发信号,触发信号直接传输给传感器以驱动传感器工作。利用GNSS信号和内部晶振结合产生高精度标准时间,建立测量时间基准。最后将时间和空间基准与触发信号基准关联,为测量数据与同步信息关联提供信息。同步控制设备生成的时空基准关联数据通过通信协议发送服务器,服务器上运行数据采集软件监听传感器对应的数据端口,将端口产生的数据与时空关联数据进行融合,生成带时间和空间信息的标准数据并存储,从而完成数据采集。根据测量要求,采集的数据有可能会进行实时解算,随着5G技术的成熟,未来测量数据可能会实现实时的后台传输。图3为我国公路、铁路、大坝等基础设施典型测量装备,已经在国内公路交通、轨道交通以及水利水务领域广泛应用,这些设备部分已出口到海外。在国际上,也有系列类似测量装备,例如丹麦Greenwood弯沉测量装备,比利时REDUCTABM-90惯性陀螺仪,加拿大Roadware,澳大利亚ARRB和美国Pathway的路面检测装备等,其中后3家路面三维测量技术都源于加拿大的INO公司。
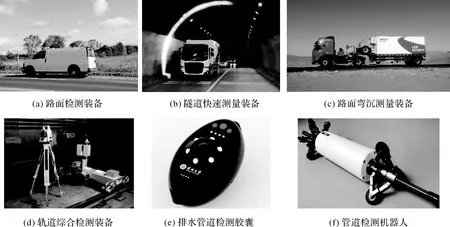
图3 公路、铁路、地铁、大坝等典型测量装备Fig.3 Surveying devices for roads, railways, subways, dams et al
2 智能化数据处理
智能化感知获得的测量数据具有明显的多源特征,如激光点云、影像数据、惯性测量数据、里程计数据等;同时具有多尺度特征,即不同测量数据的精度不同,如可能既有亚毫米级精度,也有分米级精度;此外,还有动态大数据特征,即测量数据每秒可达几百兆甚至更多。传统测量数据处理理论和方法无法处理此类测量数据,需要更加智能化的处理手段。
2.1 经典测量数据处理
测量数据处理的目的是通过降低观测误差,实现对模型中待估参数的最优求解。在经典测量数据处理问题中,线性参数估计占据主导地位。在数理统计中,最优估计量应具备无偏性、一致性和有效性[20]。最小二乘准测以估计的误差向量加权平方和最小作为最优估计准测,基于该准则估计的参数能满足最优的统计性质,从而在测量数据处理中被广泛采用。
最小二乘准则仅顾及了观测误差中的偶然误差,没有对粗差和系统误差进行处理。传统测量主要通过严格测量操作规程控制系统误差,通过几何约束和人工挑错的方法控制粗差。数字化测量需要在数据处理中更加高效地解决系统误差和粗差问题,同时处理测量场景中存在的观测不足、参数具备先验信息等情况,满足不同测量场景的数据处理需求[21]。基于高斯-马尔可夫模型和最小二乘估计方法,发展了一系列新的理论和方法,总体归纳如图4所示。

图4 现代测量数据处理方法Fig.4 Data processing methods for modern surveying data
随着包括激光扫描仪、高精度惯导、无人平台等传感器、装备和平台的快速发展。测量数据迅猛增长,形成了当代测量的大数据[22]。与传统测量数据相比,当代测量数据动态性强,来源更多,类型更加广泛,给测量数据处理方法也提出新的要求,主要表现为以下3点:
(1) 数据类型上,从传统测量需要处理的点数据,扩展到现在的线(结构线)、面(图像)、体(点云)数据。
(2) 时间特征上,从较少的静态观测数据和静态求解参数,扩展到现在海量的动态观测数据和动态测量参数上。
(3) 测量要素上,从过去的边、角、高等基本几何要素处理扩展到包括几何和属性要素的更多描述测量对象状态的具体指标(如平顺度、变形、裂缝等)。
2.2 智能化测量数据处理
传统以代数为主的平差理论和方法不能适用于复杂场景中的动态数据处理。为应对动态测量大数据处理的新要求,新的研究热点是进一步将概率统计学、优化理论与测量数据处理融合为一体,吸收融合计算机视觉和机器学习领域的众多方法和技术[23],进行测量数据的智能化分析。
在几何要素处理上,普遍采用贝叶斯框架下的概率模型融合多源测量数据,通过最大化参数在观测条件下的后验概率获得几何测量参数。与经典最小二乘估计模型对比,贝叶斯理论提供描述概率和不确定性更精确的语言,概率密度分布不限于高斯分布,涵盖了经典最小二乘估计,是一个更完善、更普适的处理方法。为求解动态观测下的此类模型,通常采用扩展卡尔曼滤波、粒子滤波等贝叶斯滤波方法。如果不需要动态求解或者本身为静态问题,还可以用如图优化、蒙特卡洛马尔可夫采样等最优化方法进行解算。
在属性要素处理上,采用机器学习方法,包括支持向量机、随机森林、K-近邻算法等监督学习方法和K-均值聚类等非监督学习方法,这些经典机器学习方法一般都使用人工设计的特征,它们被用于点云和图像语义信息理解和目标属性提取。近几年,可以自动学习特征的深度学习方法得到快速发展。深度学习方法通过大量样本训练(图5),对特征表达进行自动学习,学习到的特征由大量参数组成,具备很强的属性描述能力,因此被逐渐用于测量数据的属性要素处理中[24-26]。
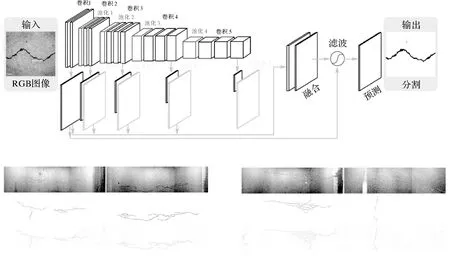
图5 深度卷积神经网络及路面裂缝识别结果Fig.5 The convolutional neural network and its application to the detection of road fissures
从数据流的角度看,测量数据智能化处理的过程即是将原始传感器采集的数据转化为所需要的测量对象特征信息的过程,如图6所示。

图6 测量数据智能化处理基本流程Fig.6 The basic flowchart of the surveying data intelligent processing
(1) 需要对多传感器采集的观测数据进行滤波融合,借助冗余观测降低观测误差,获得平差后的测量数据[27]。
(2) 需要对测量数据进行信息增强,去除或削弱非测量目标的测量信息,如点云中非目标点、图像中树木阴影等。
(3) 需要对信息增强后获得的数据进行配准拼接,包括不同站点数据配准拼接、数据模型间配准拼接。
(4) 需要对测量目标的特征信息进行识别提取,例如识别道路裂缝、轨道病害等。
动态精密工程测量具有动态、连续和大数据量等特征。与以往测量数据处理相比,需要解决多测量传感器融合、测量数据去噪增强、测量数据配准拼接,大场景数据特征自动识别等问题。未来,随着测量工程智能化需求的提升,动态精密工程测量还将从自动化测量进一步发展到智能理解,即深入融合智能分析算法,实现基于自动化测量特征的目标状态智能判别。
3 智能化监测应用
传统意义上测量工作的输出就是传感器输出的数据,但在基础设施运维检测中,测量的目的并不仅仅是为了获得数据,而是为了了解基础设施状态并对其是否异常进行评估,即需要从测量数据得到知识并利用知识辅助决策,这也是智能化应用的要求。公路、铁路、桥梁、隧道、大坝、城市管网等基础设施在运营过程中,由于外界环境、材料性能、施工工艺等原因会发生各自病害,影响其正常服务能力并威胁到运行安全,基础设施检测需要得到检测数据结果所对应的设施状态并按照行业规范和标准进行评定。
3.1 道路路面
公路路面检测依据《公路技术状况评定标准》,规定通过路面技术状况指数MQI对路面技术状况进行等级评定,评定结果分为优、良、中、次、差5个等级,MQI的分项指标包括路面技术状况(PQI)、路基技术状况(SCI)、桥隧构造物技术状况(BCI)和沿线设施技术状况(TCI)。传统静态测量效率低、影响正常交通、无法反映行车动力特征,需要对这些指标进行动态快速测量。当前,PQI所有指标都已经实现了快速检测,特别是在快速弯沉装备上集成传统路面检测技术,实现了在统一时空基准下的PQI指标一体化检测。BCI指标中的隧道衬砌裂损和水冻害指标也已经实现快速检测。SCI和TCI指标大都以调查方式进行评定。各指标评定等级划分标准见表1。
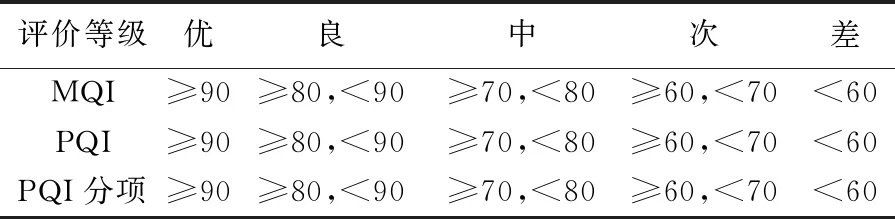
表1 公路技术状况评定等级划分标准Tab.1 Maintenance quality indicators of the road condition
路面技术状况(PQI)的分项指标包括路面损坏(PCI)、路面平整度(RQI)、路面车辙(RDI)、抗滑性能(SRI)、结构强度(PSSI)指标、路面跳车(PBI)、路面磨耗(PWI)指数。目前检测装备路面检测的结果,包括路面平整度、弯沉和抗滑系数,以及路面变形病害如裂缝、坑槽、拥包、修补、车辙、跳车、磨耗等[28-29]。平整度反映路面纵剖面起伏情况,规范规定每10 m一个代表值;弯沉反映路面结构强度,快速弯沉每1 m输出一个弯沉值,规范规定每20 m一个代表值;抗滑系数反映某个轮迹带的抗滑情况,规范规定每10 m一个代表值。路面病害检测技术已由传统的可视技术过渡到三维测量技术,可建立路面高精度三维模型,计算出路面技术状况指标并进行评级,如图7所示。该技术实现变形病害的“一测多用”,未来将可能用于计算更多指标[30]。

图7 病害在路面三维数据中的典型示例Fig.7 One example showing the detection of road damages based on 3D data
3.2 堆石坝
堆石坝因其良好的安全性、经济性和适用性,成为我国水利水电开发的优选坝型。堆石坝的内部变形监测是安全监测的重要内容,目前常用的水管式沉降仪、钢丝位移计等点式传感器,需布设大量传感器,存在传感器死亡率高等问题。特别是对于近些年发展的高堆石坝,沉降仪水准管路和钢丝长度几乎达到性能极限,传感器的测量精度和测量量程受到严重挑战,亟须发展更加可靠的内部变形监测技术[28-32]。
针对内部变形监测,提出一种基于柔性管道惯性测量的新型堆石坝内部变形观测方法,如图8和图9所示。其基本原理是在堆石坝内部布设柔性抗压变形监测管道,利用集成惯导/多里程计、管道机器人测量管道的三维曲线,相对传统的固定式检测方法如水准管和钢丝引张线,管道机器人采用动态的方法进行测量。测量时利用高精度管道机器人在管道内部往复运动,测量平台是动态的,通过对动态测量获得的高精度惯导、精密里程计进行最优融合,测量管道的线形。通过多期运动轨迹的比对,实现变形指标计算。这种基于管道测量的内部变形监测方式,与传统的水准沉降仪和钢丝引张线相比,可靠性和抗冲击性更强。不仅如此,其测量结果从稀疏点状数据变为精细、连续分布的三维线状数据,且同时测量多种变形指标。这种全新的管道变形测量系统已经在我国四川两河口、贵州夹岩等大坝项目上进行了验证和应用。

图8 基于预埋柔性管道测量的堆石坝内部变形监测原理Fig.8 The principle of measuring the internal deformation of the rockfill dam based on buried flexible pipelines

图9 高精度管道变形测量机器人及其部署Fig.9 The deployment of georobots and its use in the precise internal deformation measurement
3.3 排水管网
排水管网是雨污水排放的重要通道,是维持城市安全运行的生命线。对地下管网进行周期性全面检测,是及时发现风险、保障排水管网系统安全运维的关键。目前常见的排水管道内部检测技术包括闭路电视(CCTV)检测机器人、管道内窥声呐、管道潜望镜、管道内窥镜等。这些方法单次作业范围小、操作复杂、劳动强度大,导致检测效率低、成本高。因此,亟须发展快速低成本的连续性排水管网动态检测技术,为排水管网普查提供有效的手段,提升管网智慧运维水平[33-34]。
针对城市大规模有水状态管网检测难题,提出一种基于流体驱动排水管道动态视觉检测方法,发明排水管道检测胶囊装置,其检测原理如图10所示。在上游投放一种低成本漂流式管道胶囊,胶囊在管道中漂流时动态获取管道内壁图像数据,在下游进行胶囊回收。利用视觉与地图辅助惯性定位方法实现胶囊定位;基于深度学习进行破损、变形等病害自动识别,精度达85%。排水惯导胶囊在广东深圳、安徽合肥、浙江丽水等多地开展市政管网普查、引水涵洞调查等应用,累积检测管网数十千米,取得良好效果。

图10 流体驱动排水管道视觉检测原理和检测胶囊Fig.10 The principle of the flow-driven pipeline visual detection and the capsular device
3.4 输水工程
水利水电输水隧道是保障水利工程、水电设施、人民用水安全的重要基础设施,长期荷载会产生老化甚至结构性病害。对输水隧道进行周期性全面检测,是水利水电工程安全运营的重要保障。当前国内对输水隧道的检测仍然以人工普查为主,费时费力且检测精度差,不能满足我国现有数量多、里程长输水隧道病害检测的要求。针对输水隧道内部环境恶劣、检测手段不足的困难,研制了一套输水隧道爬绳检测机器人装备,实现对病害发展过程的数字化监控和科学分析。装备集成高精度激光扫描仪、惯导系统、里程计、高清全景摄像机等多种传感器,借助爬绳设备在输水隧道行进,动态获取相关传感器数据。利用激光扫描技术、移动测量技术、图像处理技术,生成输水隧道三维点云和高清图像。融合灰度、深度信息能够快速准确地定位和识别输水隧道病害,包括隧道裂缝、掉块、泌钙、渗漏水、接缝破损等典型病害,生成隧道病害检测报告[35]。
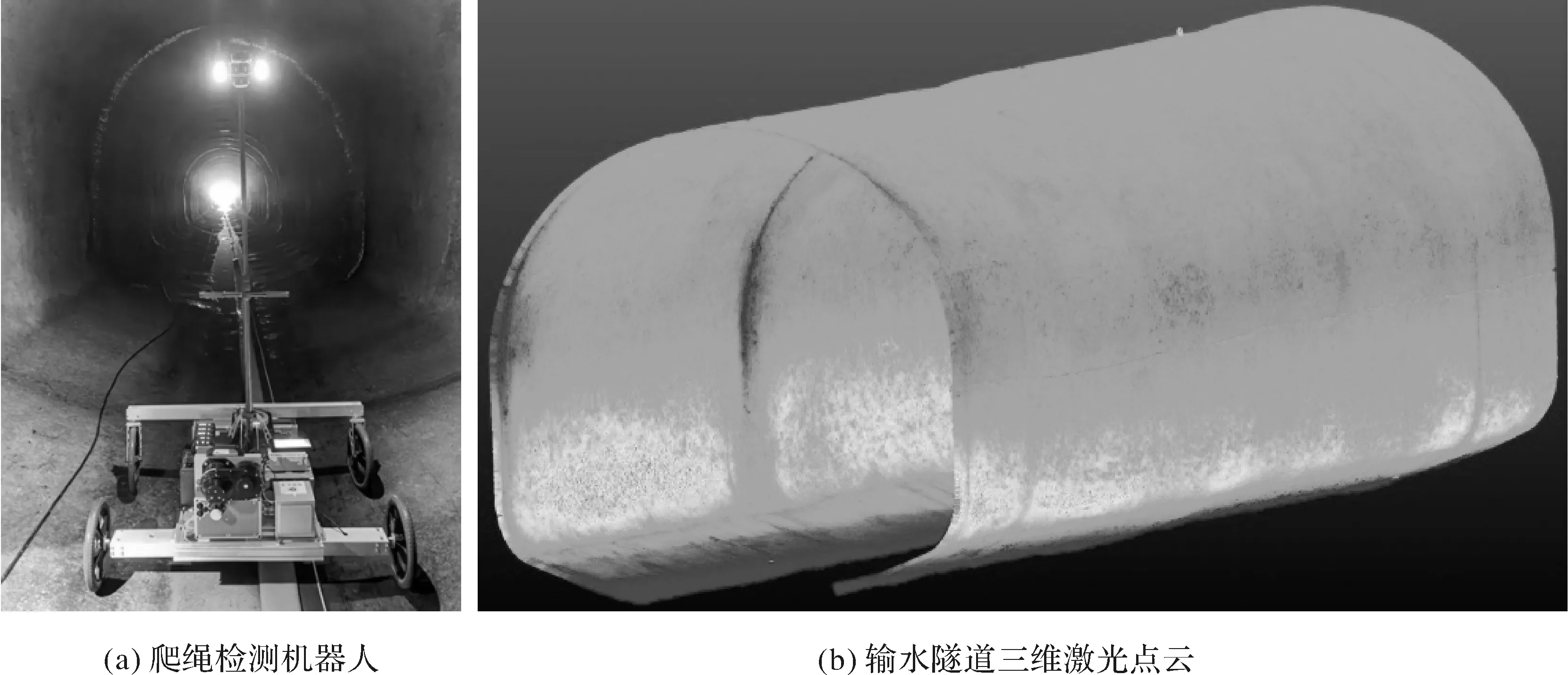
图11 输水隧道爬绳检测机器人装置Fig.11 The climbing surveying robot for water tunnel measurement
3.5 公路隧道
隧道运营过程中出现的不同类型病害会影响隧道健康运营。隧道脱空等结构性病害一般采用探地雷达检测,并已在行业得到广泛应用。裂损、水冻害等表观病害,国内外主要以人工目视及敲击检测为主,检测时需要进行交通管制,一个班组2~3 d检测1 km,效率低,安全风险高。以中型卡车为检测平台,集成多类型传感器,包括阵列灰度相机、红外相机、激光雷达及定位传感器的快速检测装备已经得到应用。灰度相机获取隧道衬砌表面图像,分辨率达到0.2~0.3 mm,进行快速裂损病害检测;红外相机获取隧道温度图像,依据水冻害会导致局部温度变化的现象进行水冻害检测;激光雷达获取隧道毫米级三维点云,利用点云的隧道三维建模并进行典型结构病害或构造物提取;还可以在移动平台上集成探地雷达等传感器进行隧道隐性病害集成检测。所有传感器集成在一个刚性支架上,有利于保持移动检测时传感器相对姿态稳定,实际工程检测时,每次只检测半幅隧道,通过旋转刚性支架实现隧道全断面检测,最快检测速度可以达到80 km/h,是未来隧道检测技术发展趋势。隧道快速检测感知及衬砌裂缝病害识别框架如图12所示。图中,数据感知模型列举了灰度、红外、点云及定位数据获取,以及基于多源数据特征匹配融合后的隧道全景数据;病害检测模型为基于全景数据的衬砌裂缝检测。

图12 隧道快速检测及衬砌裂缝病害识别框架Fig.12 Tunnel rapid testing and crack detection framework
4 总 结
改革开放以来,随着经济的快速发展,我国基础设施建设突飞猛进,动态精密工程测量为基础设施安全运维提供重要保障。本文主要介绍了动态精密工程测量的关键技术及基础设施应用,涉及智能化信息感知、智能化数据处理及典型智能化监测应用。随着人类改造自然能力和需求的不断增加,基础设施工程建设规模不断扩大,工程结构越来越复杂,建设环境复杂多变,运营过程安全风险也在增加。工程测量作为工程项目规划、建设和运营全过程重要的基础技术,对测量的效率、精度、质量和可靠性的要求也越来越高。为了应对不断出现的新挑战,动态精密工程测量技术需要向智能化测绘迈进,实现信息感知智能化、数据处理智能化、测量服务智能化,只有这样才能不断满足日益增长的基础设施监测需求。
猜你喜欢
卫星应用(2022年7期)2022-09-05
今日农业(2022年3期)2022-06-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
今日农业(2021年8期)2021-11-28
烟台果树(2021年2期)2021-07-21
今日农业(2020年19期)2020-11-06
疯狂英语·新悦读(2019年11期)2019-12-18
环球慈善(2019年6期)2019-09-25
专用汽车(2015年4期)2015-03-01