
双机器人协同鼠标装配末端夹具的设计
2021-11-03 11:57孟银娜张云鹏王一明
设备管理与维修 2021年17期
孟银娜,张云鹏,王一明
(河南机电职业学院,河南郑州 451191)
0 引言
在机器人应用领域不断扩大的环境下,多机器人在特定场合的协同作业越来越重要,根据任务要求,多机器人可以有序无误地协同配合,以完成特定场合的工作需要。机器人末端夹具是根据作用对象的形状特征来设计的,无论是夹持式还是吸附式夹具,设计时都需要满足机器人作业所需要的重复精度,最大程度上使机器人末端执行器的结构简单、紧凑、质量轻,以减轻手臂负荷。机械夹持式末端执行器多为双指头爪式,按手指的运动区分,可以分为平移型和回转型;若按照机械夹持方式区分,可以分为外夹式和内撑式;若按照机械结构特性区分,可以分为电动(电磁)式、液压式与气动式,以及它们相互的组合。气吸式机器人末端执行器,利用吸盘内的负压吸住并移动工件,根据应用场合不同,末端执行器可以做成单吸盘、双吸盘、多吸盘或特殊形状的吸盘。经比较分析,本方案中工作站采用的是夹持式末端执行器。
1 机器人1 的末端夹具分析
机器人1 末端夹具的夹持对象是鼠标底座和鼠标USB 端口,根据鼠标底座和USB 的形状特点,所设计的末端夹具手指需要有一定的开合范围。考虑到鼠标装配效率,为节省装配时间,设计多功能夹具,一个夹具配备两对手指,能够分别加持鼠标底座和USB。设计前考虑以下方面:①末端夹具夹持的对象较薄,夹持力不应过大,为避免夹持力度过大,在末端夹具中添加传感器感应夹持对象;②夹具承载变形要求,所设计的末端夹具承载不低于3 kg,应具备一定的刚度,夹持鼠标零部件时,最大变形量≤1 mm;③所设计的末端夹具应考虑鼠标底座和USB的形状尺寸,根据所夹持对象的形状特征设计夹具开合度;④根据鼠标底座以及鼠标USB 的形状特征,采用双指夹持相比三指夹持更加牢固。
综合考虑以上四点设计机器人1 的末端夹具,根据夹持对象的形状特征,设计出的夹具可以稳固夹持对象移动,不产生滑移,并且能够在夹持鼠标底座和USB 端口时顺利完成鼠标装配工作。
2 机器人1 的末端夹具设计
因机器人1 末端夹具主要作用对象是鼠标底座和鼠标USB 端口,所以设计的夹具是根据鼠标底座和鼠标USB 设计的多功能末端夹具。机器人1 末端执行器主要由夹具底座、手指1 和手指2 三部分组成:手指1 的夹持对象是鼠标USB 端口,手指2 的夹持对象是鼠标底座。在设计夹具底座时需要考虑负载力,保证能够完全承载两对手指夹持对象时的重量,并且在不发生碰撞的情况下,夹持对象运动到装配鼠标的动作位置(图1)。

图1 夹具1 底座
机器人1 手指1 的夹持对象为鼠标USB 端口,根据鼠标USB 的形状尺寸,所设计的手指1 需要满足至少13 mm 的开合度,夹持深度为3 mm(图2)。鼠标USB体积小且质地比较薄,夹持力度不应过大,设计手指1时可以适当增强手指1 夹持面的粗糙度以增加夹持鼠标USB 时的摩檫力。
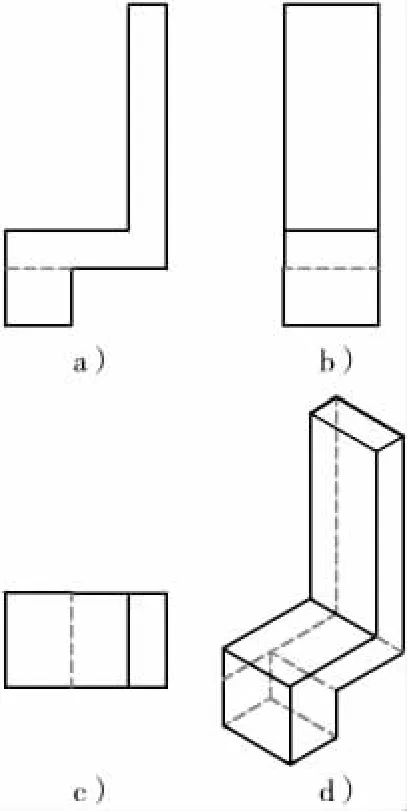
图2 夹具1 手指1
机器人1 手指2 的夹持对象是鼠标底座,根据鼠标底座的形状尺寸,手指2 需要至少96 mm 的开合度,夹持深度为3 mm(图3)。考虑到鼠标底座较薄,夹持力度不应过大,可以通过增强夹持面的粗糙度来增大夹持鼠标底座时产生的摩擦力。
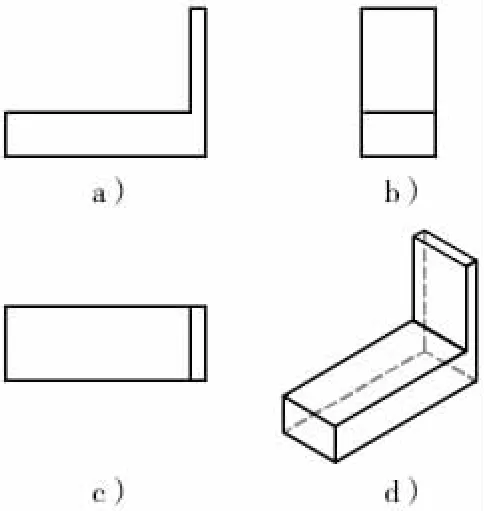
图3 夹具1 手指2
3 机器人2 的末端夹具分析
机器人2 的作用对象是鼠标电池、鼠标上盖和鼠标整体,为提高鼠标装配效率、缩短装配时间,根据鼠标上盖和鼠标上盖的形状尺寸设计了一种多功能夹具,该夹具只设计了一种综合性手指,通过设置其不同的开合度来完成鼠标电池、鼠标上盖和鼠标整体的夹持和装配。在设计之前应该考虑以下方面:①鼠标电池外表比较光滑,在设计夹具手指时应适当增强夹持面的粗糙度,并添加传感器感应电池以便顺利完成夹持作业;②夹具承载变形要求,所设计的夹具承载不低于2 kg,并且具备一定的刚度,在夹持鼠标电池、鼠标上盖和鼠标整体时,最大变形量≤1 mm;③夹持鼠标上盖时,考虑到上盖比较薄,在增强夹持面的粗糙度、添加传感器的基础上要注意夹持力度不应过大,满足夹持装配所需就可以;④所设计的手指应具备一定的开合度,且开合度满足对鼠标电池、鼠标上盖和鼠标整体的夹持、装配。
综合考虑以上要求和鼠标电池、鼠标上盖的形状尺寸,为尽可能让所设计的末端夹具结构简单、紧凑,减轻手臂载荷,所设计的机器人2 的多功能末端夹具采用一指多用,通过两个手指开合度的不同完成对鼠标上盖、鼠标电池和鼠标整体的夹持、装配。
4 机器人2 的末端夹具设计
机器人2 末端夹具作用对象是鼠标上盖、鼠标整体和鼠标电池,根据鼠标电池以及鼠标上盖的形状尺寸设计了一种多功能夹具。机器人2末端夹具的设计主要包含夹具底座、夹具手指两部分:手指可以设置不同的开合度来完成对鼠标电池、鼠标上盖和鼠标整体的夹持、装配。底座设计需考虑两个手指和夹持对象的负载力,保证在夹持对象时可以完成一定角度的旋转,保障装配作业顺利进行(图4)。
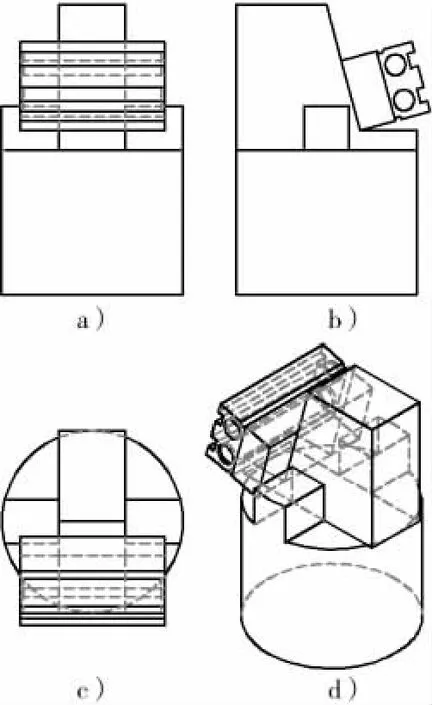
图4 夹具2 底座
根据夹具2 手指不同夹持对象的形状特征,设置不同的手指特征(图5):①对于鼠标电池的夹持装配,设置手指的开合度至少为12 mm,夹持深度为3 mm,夹持力度适中且夹持面具有一定的粗糙度并添加传感器;②对于鼠标上盖的夹持装配,设置手指的开合度至少为50 mm,夹持深度为3 mm,夹持力度不应过大,同时增强夹持面的粗糙度并添加传感器;③对于鼠标整体的夹持放置,设置手指的开合度至少为50 mm,夹持深度为4 mm,夹持力度适中。

图5 夹具2 手指
5 结束语
工业机器人广泛应用在现代制造行业领域中,在RobotStudio 中离线/在线编程、模拟仿真,对辅助工作人员进行机器人工作站布局构建、模拟仿真示教、工作姿态设计优化具有重要作用。在RobotStudio 中对末端夹爪进行改进优化,以此获得更高的装配效率。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
内燃机与配件(2022年19期)2022-12-02
一重技术(2021年5期)2022-01-18
哈尔滨轴承(2021年4期)2021-03-08
制造技术与机床(2019年8期)2019-09-03
汽车维修技师(2019年2期)2019-08-23
中学生数理化·八年级物理人教版(2019年4期)2019-05-20
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年9期)2017-11-27
