地基真实孔径雷达精度验证方法与实验研究
2021-11-06 05:54张浩杨晓琳杨峰张巴图于正兴马海涛
矿业科学学报 2021年6期
张浩杨晓琳杨峰张巴图于正兴马海涛
1.中国矿业大学(北京)机电与信息工程学院,北京 100083;2.中国安全生产科学研究院,北京 100012;3.神华准能集团有限责任公司科学技术研究院,内蒙古鄂尔多斯 010300
边坡失稳是制约矿山露天开采生产规模与体量的重要因素,滑坡预警是边坡稳定性研究的重要课题之一[1-2]。 滑坡监测预警的前提是准确获取边坡体变形信息,进而对滑坡位置、滑坡面积和滑坡时间给出预测。 在传统的GPS、全站仪等人工接触式方法和激光扫描等光学遥感方法之后[3-6],微波遥感技术因其高精度、远距离、全天候的优势,在经历了实验室验证、商用化产品及国产化实现等阶段后,由星载平台逐渐发展到地基平台,并在矿山露天边坡、桥梁、高塔、大坝及山体滑坡、坍塌类事故应急救援中均有实际应用[7-9],已经成为边坡形变监测的先进技术的代表。
根据数据采集方式和信号处理方法的不同,地基微波遥感边坡监测系统可以分为合成孔径边坡雷达系统和真实孔径边坡雷达系统[10-14]。 与前者相比,后者可通过逐点扫描实现三维空间大视场监测、集成移动平台和供电系统,更加适用于近距长条带边坡以及随采掘进程需频繁移站的监测任务。
雷达监测的形变量是目标位移在视线方向的投影值,因而理想系统精度验证实验要求,目标预设位移方向需与雷达视线方向一致,但人工布设标靶目标较难准确实现。 近年来,邢诚[15]、刁建鹏[16]、占朝彬[17]、周吕[18]等学者通过加装弹簧、高精度步进电机、游标卡尺、千分表等方式,实现了人工标靶的定量移动。 依据监测值与预设值的误差分析,对意大利IBIS-S 真实孔径雷达系统的测量精度进行研究,均未对雷达系统坐标原点及实验场景内设定的强散射特性目标识别定位问题进行精确研判,忽略了目标位移标准值存在的误差,从而影响雷达系统监测精度分析。
本文针对地基真实孔径雷达边坡形变监测精度,首先进行信号模型和信号处理方法的研究,总结了形变处理基本流程及精度验证方法。 其次基于中国安全生产科学研究院设计研制的地基真实孔径边坡雷达系统原理样机S-RAR,开展三角板角反射器静态与动态实验,通过雷达散射回波信号与三维点云数据拟合结果对比分析,准确识别定位目标空间位置并构建观测几何关系,将目标视向位移值作为目标位移标准值,与雷达监测数据比较,验证了本方法流程、系统形变反演的准确性和监测精度。 最后将该雷达系统布设在内蒙古黑岱沟露天煤矿进行边坡监测实验,验证了系统的实用性。
1 形变处理基本流程
地基真实孔径雷达系统通过高增益天线向目标发射高频率宽带微波信号并接收目标后向散射回波。 天线在二维转台的控制下可实现方位角φ和俯仰角θ的扫描,从而遍历整个监测范围。 在监测几何中,坐标原点位于转台轴线交点,设发射信号频率为fk,fk∈[fc-B/2,fc+B/2](fc为载波频率,B为信号带宽),位于(m,n)位置的目标后向散射回波为S(fk,θm,φn),当目标在T1和T2两次采样间隔内发生位移Δd时,会反映在雷达一维像的相位中,由于发射频率高,微小位移即可引起可观的相位变化,因此获得很高的测量精度,工作原理如图1 所示。 信号处理为接收到的回波s提取相位信息, 并根据相位差Δφ解算Δd[19-22]。
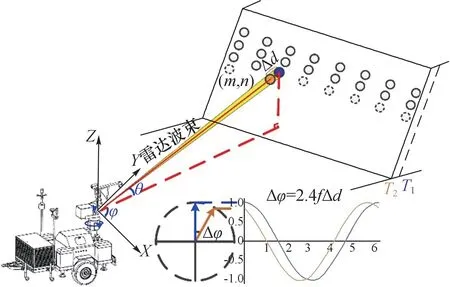
图1 地基真实孔径边坡雷达工作原理Fig.1 S-RAR working principle
令A(θm,φn)表示目标回波幅度加权,目标到雷达视线方向(LOS)距离为R(m,n),则回波信号模型可用式(1)表示:
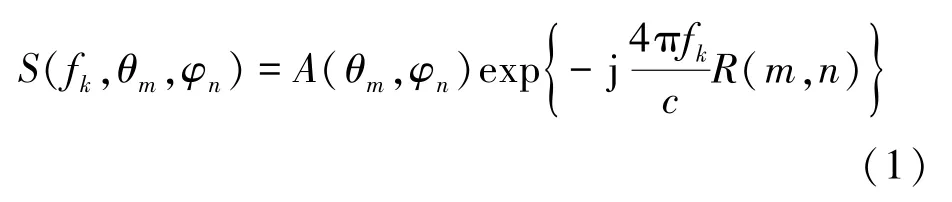
式中,exp{·}为自然常数e的指数函数;j 为虚数单位;c为自由空间的电磁波波速。
对式(1)进行逆傅里叶变换(IFFT),可得到各个距离单元上目标散射中心的分布,即高分辨率雷达一维距离像[23]:

式中,K为频点数;Δf为频率间隔;N为IFFT 点数;λc为中心波长;Rℓ为距离信息。
由式(2)可知,一维像峰值距离即为目标位置,结合系统反馈的角度信息(θm,φn)可以得到被测目标场景三维空间位置[R(m,n),θm,φn]。
对连续采样时刻T1和T2按上述方法得到的雷达一维像I1(Rℓ,θm,φn)和I2(Rℓ,θm,φn)进行干涉处理,得到相位差

式中,arg{·}为求辐角主值函数;“*”为复数共轭。
由式(1)可知,Δφ和Δd的关系为
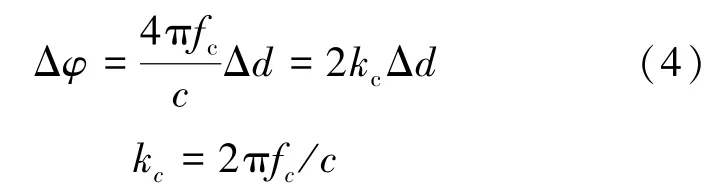
式中,kc为载波参数。
若设fc为14 GHz,Δd为0.1 mm,则Δφ为3.36°。
联立式(3)和式(4),再经过相位滤波、解缠等,即可解算出目标位移为

需要说明的是,实际系统在进行远距离、长时间监测时,应该存在误差项,可表示为
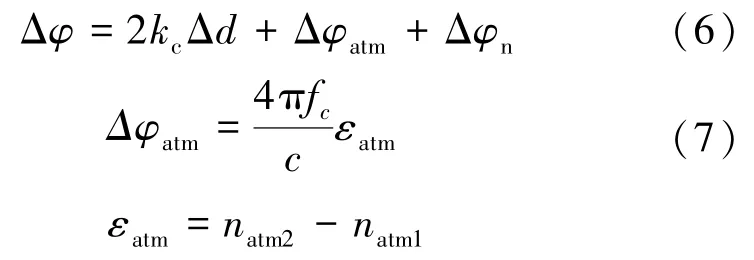
式中,Δφ为实测相位差;Δφn为噪声(斑点噪声和热噪声等)引入的随机相位误差;Δφatm为测量过程中因电磁波传播媒介特性变化引起的相位差[24];εatm为相邻监测周期内大气折射率的变化,与传播路径上的温度、气压、湿度有关。
本文后续目标静止、位移实验中均为近距离(小于200 m)观测模式,重复监测周期很短(小于10 min)且传播媒介特性稳定,可认为εatm≈0;预设强散射特性目标点(视为高相干点)信噪比较高,故在相邻时间序列位移解算时,可近似忽略由Δφatm、Δφn引起的误差;真实矿山边坡开展的区域性监测实验中,大气环境对雷达信号的延迟影响需通过大气相位校正进行处理。 S-RAR 雷达回波数据处理流程框图如图2 所示。
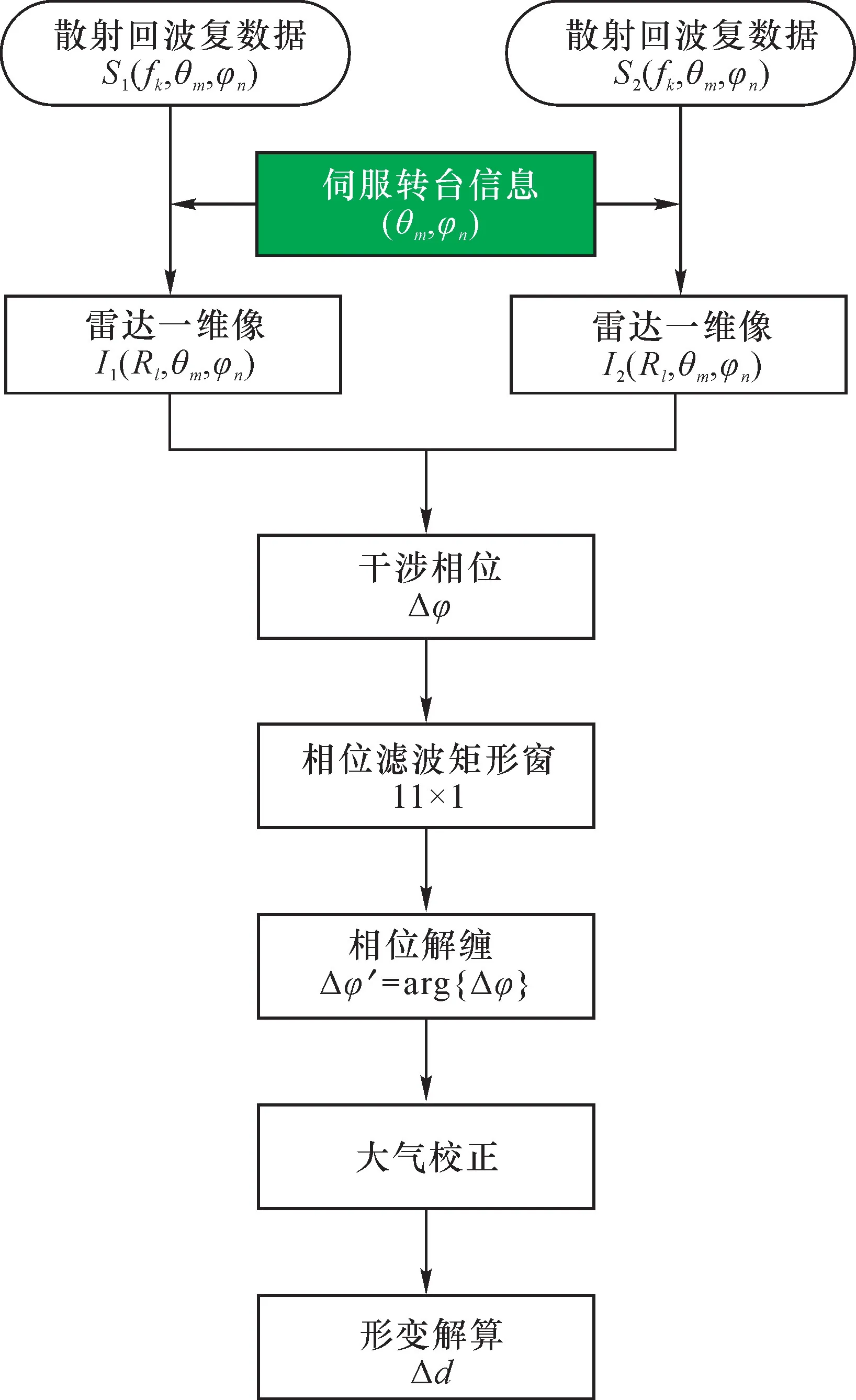
图2 地基真实孔径边坡雷达回波数据处理流程Fig.2 Flow chart for S-RAR echo data processing
2 误差分析及精度验证方法
2.1 位移标准值误差分析
雷达精度验证实验通常将强散射特性人工标靶置于雷达天线前方某处,通过步进位移设备定量控制其移动距离(0.5 mm、1 mm、2 mm 等),粗略认定目标预设移动方向即为雷达视线监测方向,对比分析目标预设位移值dlos与雷达形变值。 在雷达波束平行近似几何观测模型中[25],dset与目标视向位移值的关系可表示为

式中,α为雷达入射角。
只有依据实际几何关系将dlos视为目标位移标准值,才能对系统监测精度进行准确分析。
由式(8)可知,目标位移标准值误差derror=dset-dlos,它与α、dset的关系如图3 所示。 从图3可知,按照常规实验设定,单次移动标靶目标产生的位移标准值误差可能接近甚至大于地基真实孔径雷达系统标称的亚毫米级监测精度值,这大大降低了系统精度实验的可信性。 此外,若目标与雷达处于不同高程位置,则会进一步导致误差增大。 强散射特性目标点识别定位分析和目标位移标准值的确定,对于雷达系统监测精度验证有重要意义。
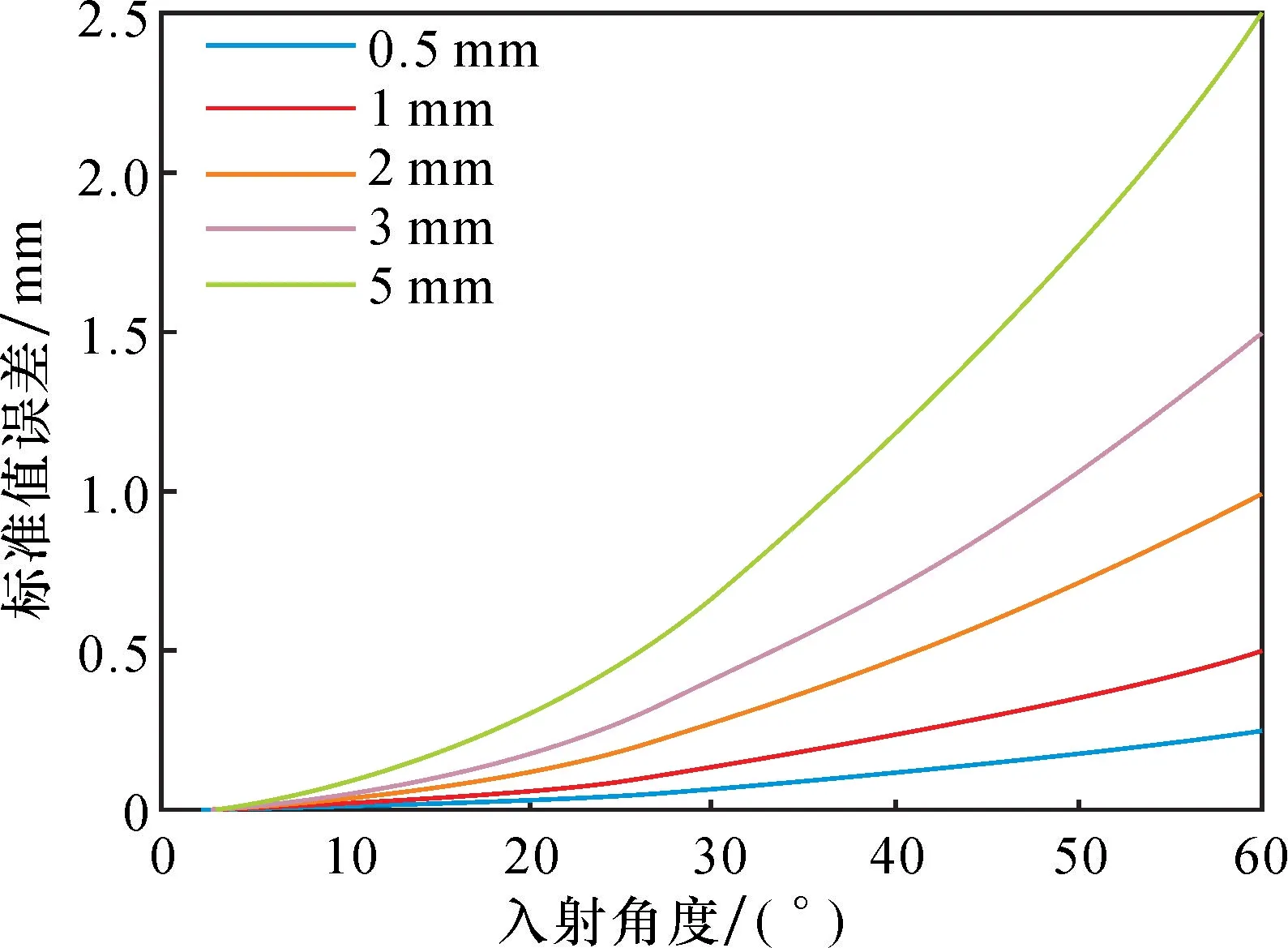
图3 标准值误差分析Fig.3 Standard value error analysis
2.2 精度验证流程
地基真实孔径边坡雷达系统由射频系统、天线系统、中控系统及其他功能模块组成,如图4所示。 射频系统产生发射波信号,并完成目标散射回波接收和数字信号采样;天线系统由偏馈馈源和抛物面天线组成,将导行波转化为在自由空间传播的辐射波;二维转台控制波束范围覆盖整个监测场景;中控系统实现各功能模块协调控制并按照上述流程完成信号处理;其他功能模块包括光学测量、气象站、预警系统、无线通信、供电系统等。 主要技术参数见表1。

图4 地基真实孔径边坡雷达系统组成Fig.4 S-RAR system components
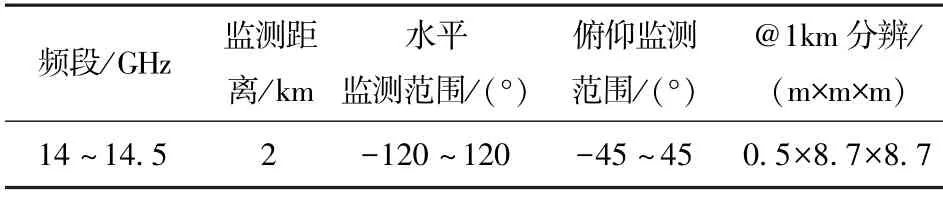
表1 地基真实孔径边坡雷达技术参数Tab.1 S-RAR technical specifications
本文结合S-RAR、三维激光扫描仪等设备,通过对三维点云数据拟合分析,并与雷达一维距离像信息比对,准确识别具有稳定散射特性的高相干点目标,提出了适用于验证该类型雷达系统形变监测精度的方法,具体流程如图5 所示。
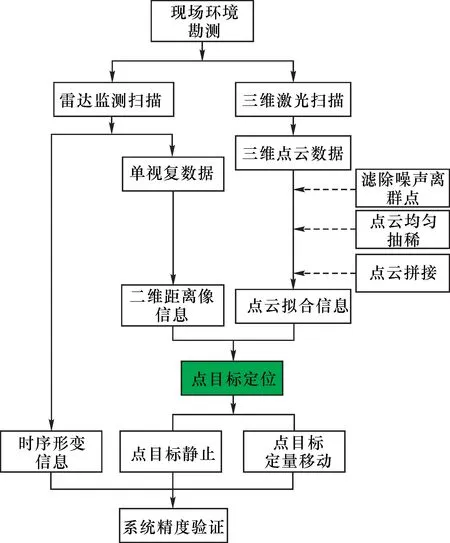
图5 监测精度验证流程Fig.5 Flow chart for monitoring accuracy verification
3 监测精度实验
本节根据上述监测精度验证方法,在识别判定角反射器目标空间位置的基础上,开展点目标静止与移动实验研究,通过雷达实测数据与目标位移标准值对比分析,验证了系统0.1 mm 监测精度,矿山边坡区域性监测结果说明了系统数据的实用性。
3.1 目标静止实验
目标静止实验在视野开阔的露天场地内进行,将布设在雷达系统前方的三角板角反射器(以下简称角反,CR)作为人工标靶目标。 实验参数见表2。 将角反架设于三维微动台之上,静止实验时不调节角反位置。 角反架设完成后,以信号幅度为判据调节天线指向,使得雷达射频前端最大程度接收目标回波能量,记录该时刻天线水平、俯仰角度。现场照片及点云处理结果如图6 所示。

表2 静止目标实验参数Tab.2 CR static experiment setting

图6 实验场景及其三维扫描结果Fig.6 Experimental scene and TLS result
使用三维激光扫描仪同步扫描整个实验场景,并按图5 所示采用点目标定位方法确定角反顶点及雷达坐标原点。 三维点云数据拟合3 个角反角板平面,可记为
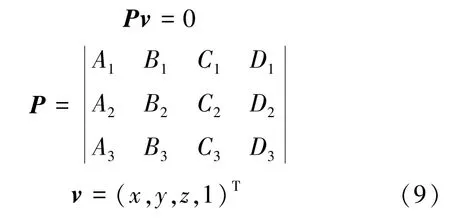
式中,(A,B,C)分别为对应平面的法向量;D为常数参量。
通过平面P1、P2可求得交线l1的空间向量
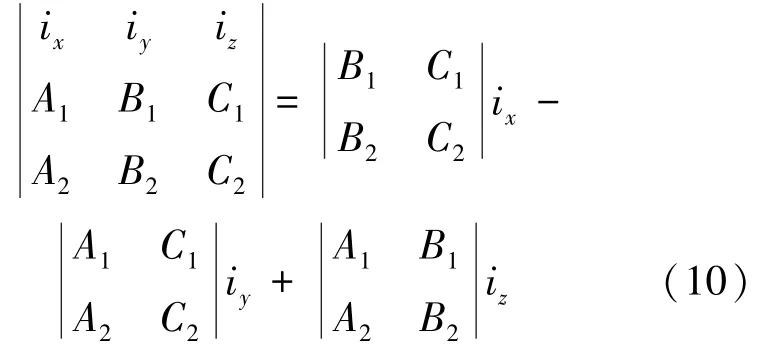
式中,ix、iy、iz分别为空间中相互垂直的三条坐标轴的单位向量。
直线l1与角板平面P3的交点即为角反顶点O1。 为确定雷达坐标原点,选取转台连接平面M和俯仰转轴平面N的点云数据,如图7 所示,通过平面拟合求得各自的中点坐标和法向量,并计算出过各自中点两条直线lm和ln,则lm和ln的交点即为雷达坐标原点O2。
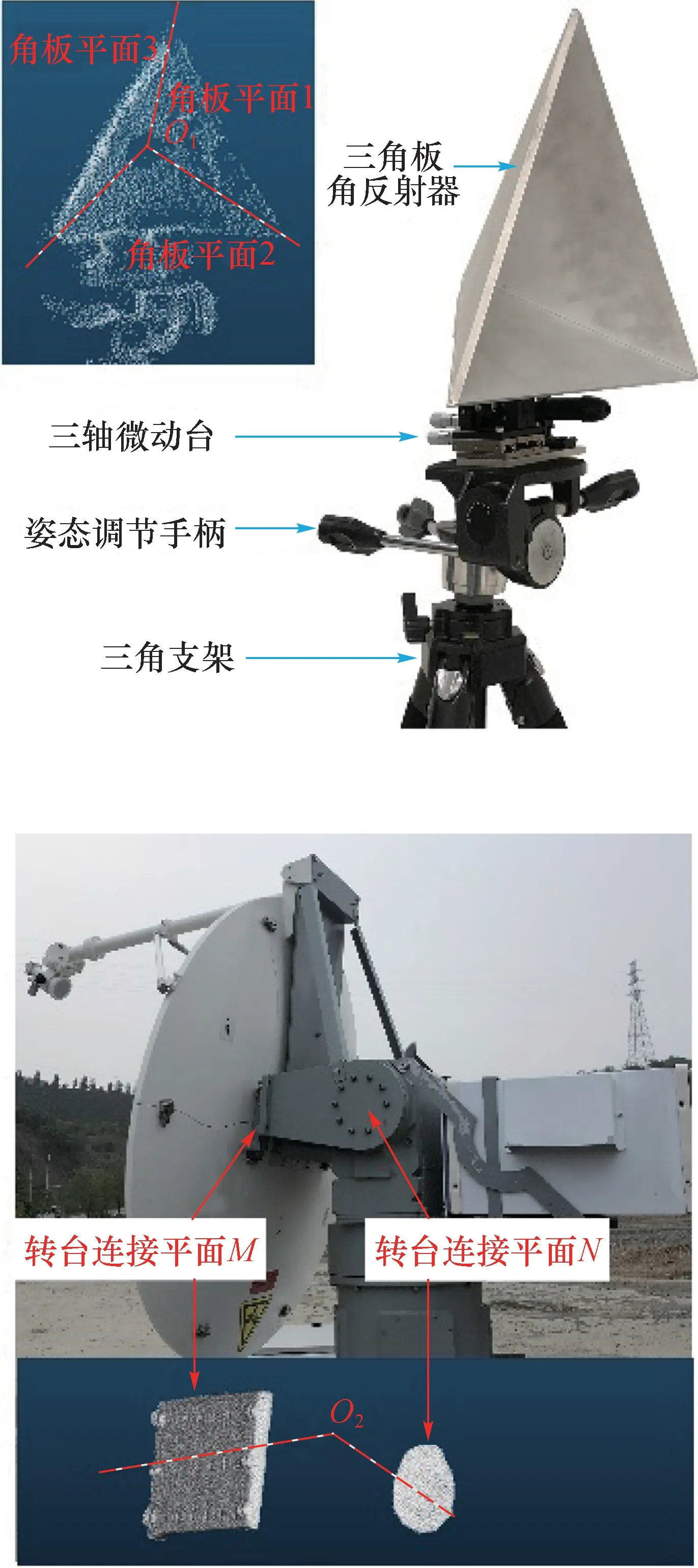
图7 角反和雷达坐标原点示意图Fig.7 CR and radar coordinate origin diagram

式中,(am,bm,cm)、(an,bn,cn)分别为两平面法向量;(xm,ym,zm)、(xn,yn,zn)分别为两平面中点坐标。
按照上述步骤,在以三维激光扫描仪位置为零点的局部坐标系内求得的角反顶点O1(0.424 3,-9.054 2,-0.174 4)与雷达坐标原点O2(0.739 6,22.281 7,0.868 4)的距离约为31.354 8 m。 经过实验室校准,雷达系统内部射频链路电长度为5.630 3 m。
实验场景雷达一维距离像如图8 所示。 由图8 可知,在距雷达36.981 4 m 处存在后向散射强度明显高于其他分辨单元的回波强点,具体回波信号分析如图9 所示。 结合实际场景中三维激光扫描仪点云数据拟合信息可判定,此目标点为人工布设的三角板角反射器,在雷达极坐标系下为(31.354 8,-0.143 1,0.066 3),据此求解目标位移标准值。
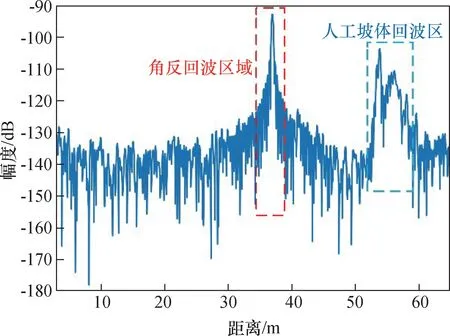
图8 监测场景一维距离像Fig.8 1D range profile of monitoring scenes
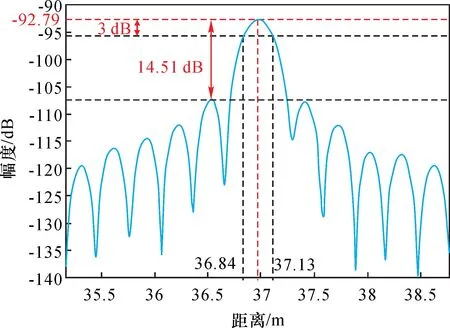
图9 角反目标回波分析Fig.9 CR taarget echo analysis
按照图2 所述流程处理监测数据,解算位移结果。 因目标静止,可认为位移标准值为0 mm。位移误差分析如图10 所示,绿色直线表示理论为0 的位移误差值;红色圆点表示雷达监测CR位移误差;蓝色虚线表示±0.1 mm 位移误差。 静止角反射器在监测时间段的累积形变位移量为0.047 8 mm;雷达监测数据平均误差为0.004 0 mm,其中偏差最大值为0.202 7 mm,偏差最小值为0.005 4 mm;均方根误差(RMSE)为0.081 0 mm,小于系统0.1 mm 的监测精度。
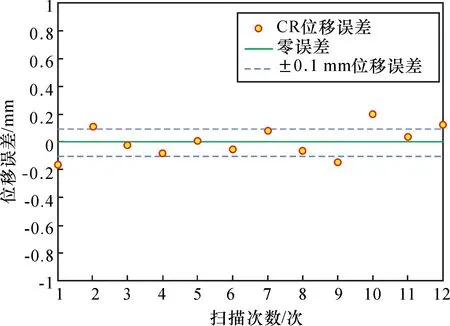
图10 静止目标位移误差分析Fig.10 Static target displacement error analysis
3.2 目标位移实验
保持上述实验场景中雷达系统与角反点目标相对位置不变,通过调节三轴微动台后端的螺旋测微器实现角反射器精确移动。 本实验在调节目标位移时,将位移参数设为角反单次沿朝向雷达方向移动距离1.0 mm,避免因复数辐角的多值性而出现相位缠绕。 实验共进行8 组,每组参数均相同,共移动10 次。 依据雷达与角反的空间几何关系,可知单次目标位移标准值为0.987 6 mm。
强散射特性目标的历次雷达回波幅度应保持一致,单次移动固定距离在复平面内的幅角变化量约为33.6°。 同组实验不同时间获取的角反点目标复信号在复平面内的分布如图11 所示,图中绿色圆轨迹半径对应为幅度均值。

图11 目标复信号分析Fig.11 Target complex signal analysis
目标位移实验测量结果和误差分析分别如图12、图13 所示。 经雷达测量的位移值xi均处于理论值di与3 倍均方根误差范围内。 对重复进行的8 组实验结果分析可得,移动角反射器的平均累积形变位移量为9.948 0 mm,与目标雷达视线方向移动值相差-0.039 6 mm;雷达监测数据与设计值的平均误差为0.004 0 mm,其中偏差最大值为-0.093 3 mm,偏差最小值为0.015 9 mm;均方根误差为0.069 7 mm,小于系统0.1 mm 的监测精度。

图12 位移测量结果Fig.12 Results of target displacement measurements
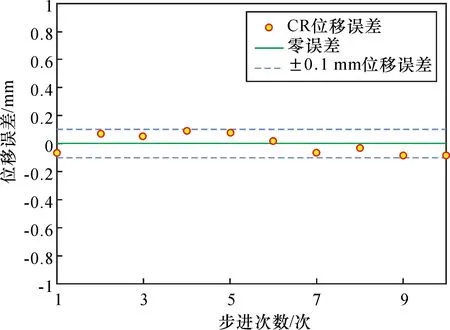
图13 目标位移测量误差分析Fig.13 Error analysis of target displacement
3.3 区域性监测实验
神华准格尔能源有限责任公司黑岱沟露天煤矿是一座年生产能力3 400 万t 的大型露天煤矿,吊斗铲倒堆开采工艺形成的边坡宽度长、高度大、倾角陡,易造成片帮、滑坡、崩塌等危险,威胁下部作业人员和设备的安全。
为进一步验证S-RAR 系统实际监测能力,自2020年7月24日至7月28日,在矿区采场内开展了边坡区域性监测实验,成功采集了159 组有效监测数据。 监测实地场景如图14 所示,图中红色区域为选定雷达监测范围。 雷达系统参数设置见表3。
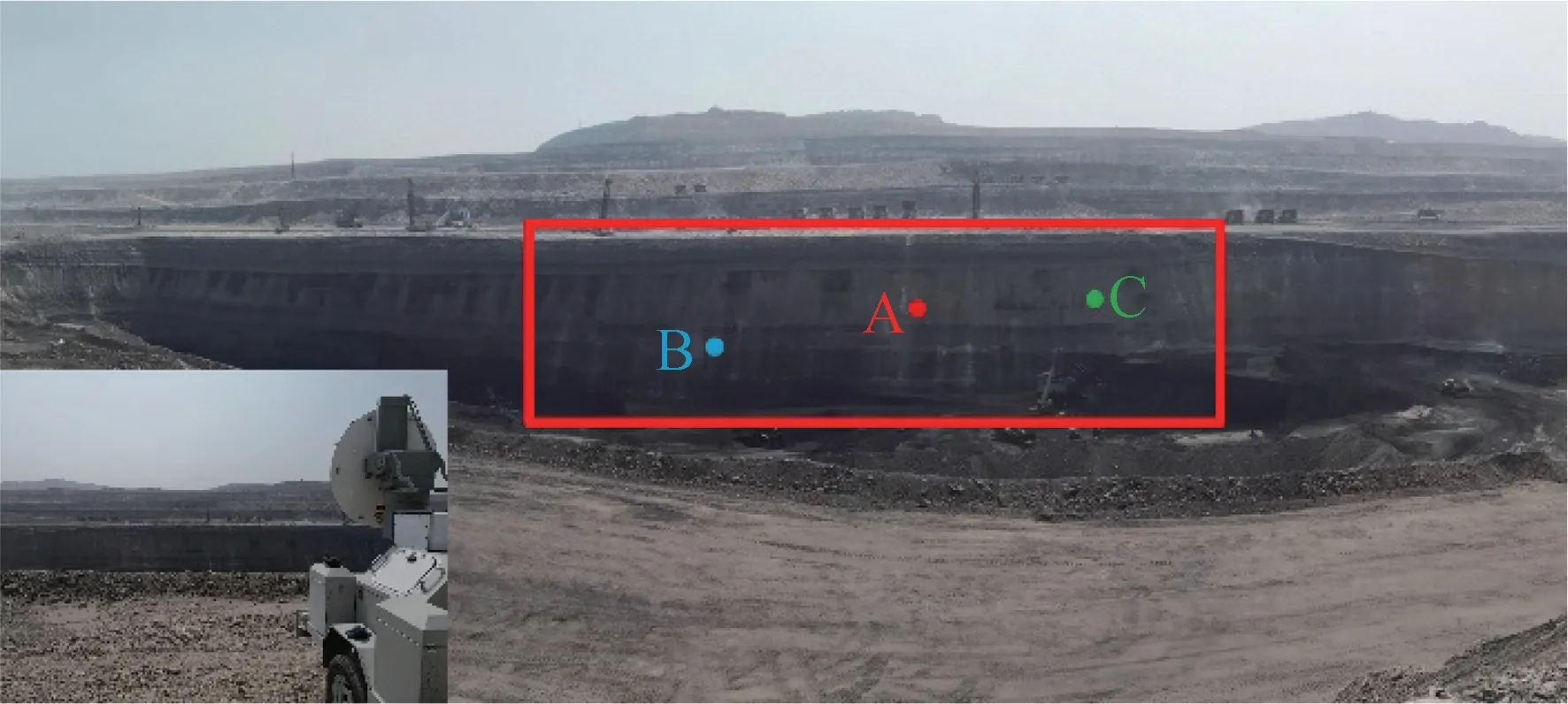
图14 边坡监测实景Fig.14 Real view of slope monitoring

表3 地基真实孔径边坡雷达系统参数设置Tab.3 S-RAR system parameter setting
选取25日06:04 ~18:53 时间段内23 组雷达监测数据,依据雷达回波处理流程可获取边坡监测区域内具有强散射特性的髙相干目标在该时段内的位移图,如图15 所示。

图15 06:04 ~18:53 时间段内边坡目标位移Fig.15 Slope target displacement map in 06:04 ~18:53
为便于直观比对分析,在雷达监测范围内选定3 个特征目标点A、B、C,并将目标初始位移值设为0 mm,特征点形变位移分析结果如图16 所示。 通过对比分析A、B、C 的位移测量结果可知:地基真实孔径边坡雷达在监测时段内稳定运行并能及时获取目标的高精度形变位移数据,其中A 点最大位移量为0.804 7 mm,累计位移为-0.102 5 mm;B点最大位移量为1.630 6 mm,累计位移为4.290 2 mm;C 点最大位移量为1.290 5 mm,累计位移为8.102 7 mm。 综合矿区实际生产情况研判,雷达监测区域内高台阶边坡基本处于稳定状态。 C 点形变位移量较大的原因可能是近期人工抛掷爆破导致该区域堆积松散土和矿石残渣的滑动。
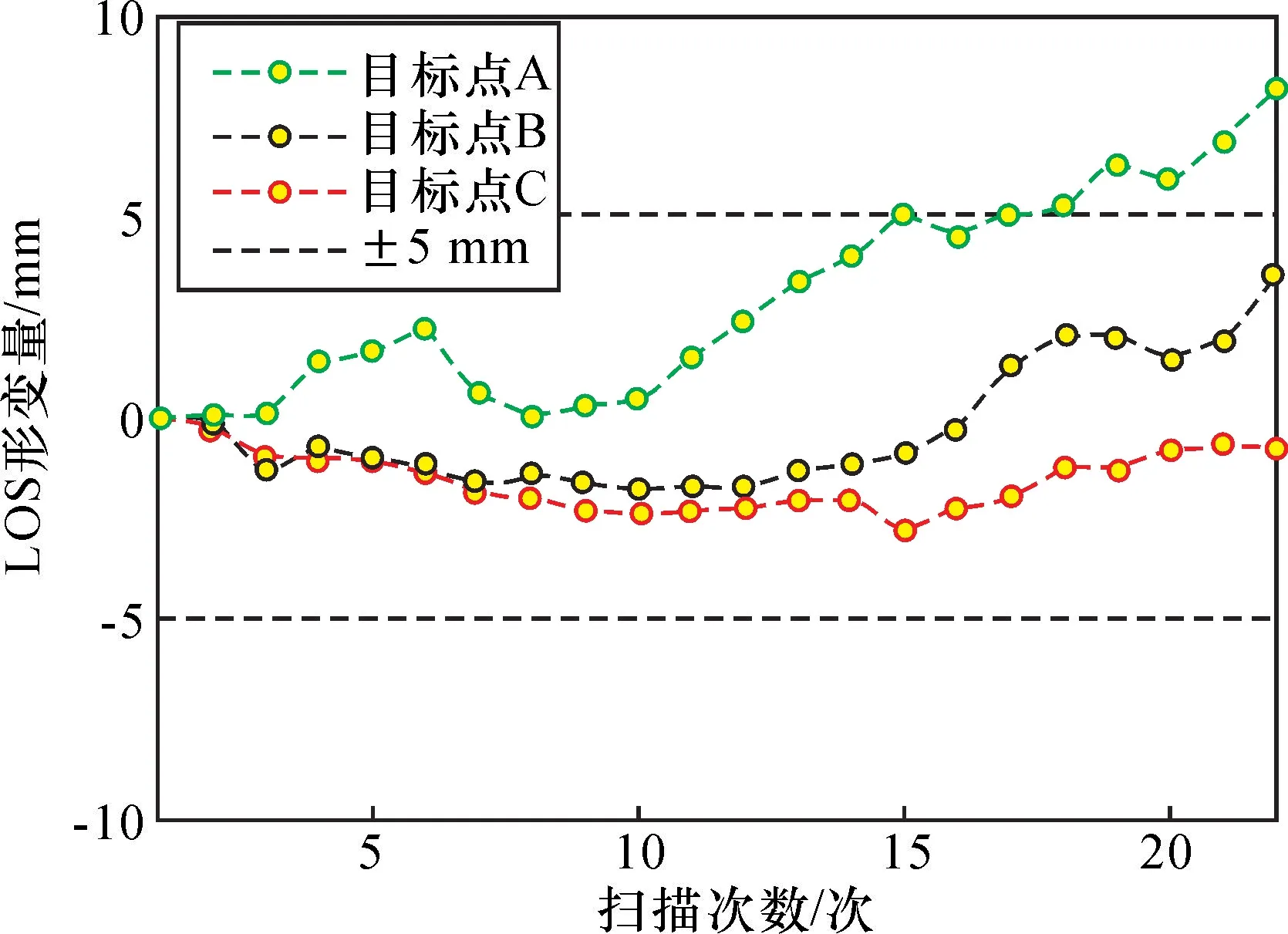
图16 特征点位移测量结果Fig.16 Results of feature target displacement measurements
4 结论和展望
(1) 目标静止实验、目标位移实验、区域性监测实验分析结果有力证明了S-RAR 地基真实孔径边坡雷达系统亚毫米级形变位移精度,是保障矿山安全生产、滑坡应急救援的先进技术。
(2) 基于三维激光扫描仪点云数据与雷达回波数据相结合的强散射点目标定位方法及流程,本文对同类型雷达系统形变监测精度验证研究具有借鉴意义。
为充分利用雷达形变位移数据,准确获取滑坡位置和面积信息,今后将在回波模型误差分析、三维成像、地形匹配、预警模型等方向开展进一步研究工作。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
雷达科学与技术(2022年5期)2022-10-26
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
农业工程学报(2022年10期)2022-08-22
煤炭工程(2022年7期)2022-07-21
建材发展导向(2022年4期)2022-03-16
建材发展导向(2021年22期)2022-01-18
军事文摘(2021年24期)2022-01-11
科学与财富(2021年36期)2021-05-10