
星载对地观测光子计数激光雷达去噪方法浅析
2021-11-11 02:09焦慧慧谢俊峰刘仁莫凡
航天返回与遥感 2021年5期
焦慧慧 谢俊峰*, 刘仁 莫凡
星载对地观测光子计数激光雷达去噪方法浅析
焦慧慧1谢俊峰*1,2刘仁2,3莫凡2
(1辽宁工程技术大学测绘与地理科学学院,阜新 123000)(2 自然资源部国土卫星遥感应用中心,北京 100048)(3 河海大学地球科学与工程学院,南京 211100)
光子计数激光雷达因多波束、低耗能、高重频、测量灵敏度高等优点在新一代天基激光雷达中有着不可估量的发展潜力。然而光子计数激光雷达发射的弱光子信号容易与太阳、大气等引起的背景噪声混叠难以区分,严重影响激光数据处理与应用。文章基于光子数据几何特性,从二维剖面映射中的背景去噪与二维图像背景去噪、单级滤波和多级滤波等多个维度,对现有光子计数激光雷达去噪方法进行了归纳和总结,分析和对比了几类方法的优缺点,并指出了未来国产星载单光子计数激光雷达测高数据预处理的主要发展方向为多级滤波去噪。
光子计数 背景噪声 去噪方法 星载激光雷达 对地观测
0 引言
星载激光测高雷达技术发展至今已经历多次变革,按照测距计时方式大致分为四代:基于单阈值时刻鉴别和高精度时间数字转换(Time-to-Digital Converter,TDC)测时体制、基于多阈值时刻鉴别和TDC测时体制、基于全波形的测距体制以及基于光子计数的测距体制。相对于传统线性体制激光雷达,光子计数激光雷达(Photon-Counting Lidar,PCL)是一种新型激光三维雷达[1],它采用高重频、低能量的激光器和灵敏度极高的单光子探测器(Photon-Multiplier Tube,PMT或Geiger-Mode Avalanche Photodiode,GM-APD),利用回波信号中的单光子能量,以较低的激光脉冲能量获取远距离空间目标的距离信息,解决传统激光雷达存在的激光器体积大、质量大、可靠性低、能量强弱和重复频率之间的矛盾等问题[2-4]。
随着光子计数技术的日益成熟,已有部分国家针对星载对地观测光子计数测高雷达开展了相关研 究[5-8]。2018年9月,美国NASA发射了第二代冰、云和陆地卫星ICESat-2(Ice,Cloud and Land Elevation Satellite Mission 2),其搭载的先进地形激光测高系统ATLAS(Advanced Topographic Laser Altimeter System)是目前唯一在轨的星载对地观测光子计数激光测高雷达。为提前测试和验证ATLAS的指标与性能,NASA研制了机载光子计数激光雷达MABEL(Multiple Altimeter Beam Experimental Lidar)[9]和SIMPL(The Slope Imaging Multi-polarization Photon-counting Lidar)[10]。ATLAS、SIMPL及 MABEL参数如表1所示。
表1 ATLAS、MABEL、SIMPL参数和足印/波长配置比较
由表1可以看出,机载雷达采用与ATLAS尽可能相同的参数,且采用多通道波束进行地面探测。从回波数据可看出,光子计数激光雷达回波数据均夹杂着大量的背景噪声(离散分布密度低的为噪声,密集的表示有效信号光子),导致有效信号光子与背景噪声光子难以区分,严重影响到光子数据的后续处理与应用。因此,背景噪声滤除成为光子计数激光雷达数据预处理不可或缺的一步。本文首先从光子计数激光雷达特性及回波数据入手,分析了主要噪声来源,然后对现有去噪方法进行了梳理,将已有研究方法分为两大类,分析了各自优缺点。最后展望了回波数据去噪方法发展趋势,为未来我国星载光子计数激光测高雷达数据预处理提供理论参考。
1 噪声源分析
星载光子计数激光雷达工作示意如图1所示(以ATLAS为例)。激光发射系统将单束激光分裂成多束,使得数以万亿计的光子激光脉冲照射到目标地物表面,经漫反射后的回波光子触发盖革模式下的雪崩光电二极管,记录下光子到达接收望远镜的时刻,从而获得卫星与地面目标的距离。

图1 星载光子计数激光雷达工作示意图
雪崩光电二极管接收到的信号中除了来自目标表面的反射光子外,还包含以下两类噪声:单光子探测器本身的暗计数和视场内的背景光子噪声[11],


2 去噪方法研究现状
星载光子计数激光测高雷达数据在空间几何分布上通常呈现出两大特性:1)空间分布差异大,背景噪声光子与其近邻光子的距离比有效信号光子之间距离大[16];2)光子密度在水平方向和垂直方向上显著不同[17]。针对以上特点,相关研究学者提出过十多种不同的去噪算法,根据光子数据几何分布特征划分为两大类:第一类将原始数据转换为沿轨距离和高程,在二维剖面上进行去噪处理;第二类基于二维图像背景去噪,首先将剖面点云数据进行光栅化,再对栅格化后图像进行处理。
2.1 基于二维剖面映射的背景去噪
基于二维剖面映射的背景去噪是当前的主流去噪方法,根据滤波层级,可细分为单级滤波去噪和多级滤波去噪。单级滤波去噪即仅采用单一方法对光子点云数据去噪,代表性的有基于高程频率直方图的去噪[18]、基于局部距离统计的去噪[5,19-22]、改进的DBSCAN(Density-Based Spatial Clustering of Applications with Noise)[23-25]、基于随机森林的去噪[26-27]等;多级滤波去噪即采用多层级多种方法分级去噪[28-30],该类方法主要以某一方法为主,结合多种方法实现多级滤波去噪,通过将多种方法联合使用达到“1+1”大于2的效果。图2为单级滤波及多级滤波策略的去噪流程,目前最多采用三级滤波器进行有效信号提取。

图2 光子数据去噪流程
2.1.1 单级滤波去噪
(1)基于窗口光子总数直方图统计的单光子去噪
该方法通过统计固定窗口内光子总数直方图,设置合适的阈值进行有效信号光子提取,其中文 献[18,31]以均值和标准差作为阈值识别有效信号光子,该方法可以识别出冰盖高度,得到陆冰或海冰表面轮廓。文献[32]基于统一的时间增量以垂直分辨率生成光子数据直方图,利用泊松统计设置阈值剔除噪声。该类方法只能对回波数据进行粗略标记,且需输入大量参数,增加算法复杂度。
(2)基于局部距离统计的单光子去噪
该方法主要通过公式(3)计算光子与邻近光子的距离,并将光子与其邻近个光子的距离相加获得局部距离和distsum,统计distsum的频数直方图选取阈值剔除噪声[5,19-20]。

式中 dist()表示光子与之间的距离;表示沿轨距离;表示光子高程。
在此基础上,文献[21,22]将距离和改为距离和的平均值实现去噪;文献[22]通过构建KD-Tree计算距离,提高了搜索效率;文献[33-34]在进行邻近距离直方图统计前,采用自适应阈值搜索邻近光子,基于差分渐进高斯自适应方法剔除噪声;文献[34]基于人工判读进行了评价,采用不同地形数据进行实验,结果表明该方法去噪精度总体优于95%,但仍会存在孤立状的密集簇状噪声光子;文献[35]基于所有光子在空间中均匀分布的特点,利用近邻(-Nearest Neighbor)的概率分布函数判断每个光子点云的距离,提出基于贝叶斯决策的去噪算法,该方法能有效剔除背景噪声,不仅适用于平坦地形,也适用于较陡峭的山地。
(3)基于局部密度统计的单光子去噪
该算法通过计算给定搜索区域内的局部密度基于局部离群因子设置阈值剔除噪声光子[36-37],实验对比不同搜索区域形状对结果的影响,证实水平椭圆搜索较之圆形及垂直椭圆搜索形状更好。类似的,文献[23,38]提出了一种改进的密度空间聚类算法(Modified Density-Based Spatial Clustering of Applications with Noise, mDBSCAN),将公式(3)距离判断函数改为椭圆区域函数(4),如图3所示,通过计算距离dist()判断是否保留作为局部密度统计中的光子。文献[24-25,39-40]则基于粒子群优化模型PSO ( Particle Swarm Optimization) 提出PSO-DBSCAN算法,使得DBSCAN算法中的两个重要参数扫描半径(EPS)以及最小包含点数(MinPts)实现自适应设置。以上方法通过人工判别或利用统计指标定量评价算法性能。
式中 x和h分别表示沿轨距离/飞行时间和光子高程;a和b分别表示椭圆的长轴和短轴。文献[6]通过加入椭圆旋转角计算邻近点的密度实现方向自适应滤波去噪,将得到的有效光子信号在地面三维点云中查找用于评定算法性能。
(4)基于随机森林的光子去噪[26-27]
该方法主要步骤如图4(c)所示,通过构造光子数据特征,基于随机森林对光子数据进行分类从而实现噪声剔除,并将最终分类结果与美国航天局官方产品的分类结果对比。但训练样本的选取对结果影响较大,不同地形去噪需借助不同的特征参数变量。

图4 单级滤波去噪算法流程
由上述文献可知,单级滤波去噪基本能实现光子计数激光雷达噪声光子剔除,但大多数方法需人为设置阈值,自适应性差;其中一些算法未能达到精细化去噪,结果仍存在少数噪声。
2.1.2 多级滤波去噪
针对单级滤波去噪不彻底,自适应较差等缺点,有学者提出了联合多种滤波方法的多级滤波去噪。
文献[31]提出了基于局部信息统计的三级光子滤波去噪方法,通过局部高度直方图、归一化光子密度识别及三次样条插值迭代法的三层滤波实现光子精去噪,能够有效识别地物表面信号光子,但在不同植被覆盖区域有效信号光子提取略有差异;文献[40]通过图像分割进行粗去噪,随后基于文献[41-42]中的径向基函数方法进行精去噪。该算法具有较好的自适应能力,无论是低密度噪声还是高密度噪声,均能有效地区分。算法采用滤波精度进行性能评价,得到的植被滤波精度和地面滤波精度均超过90%,但该方法容易出现过去噪情况,导致地物信息不连续;文献[28-29]则提出了一种以光子密度为核心的两级去噪算法,基于高程频率直方图、密度分布直方图两级滤波进行背景噪声剔除。采用目测和统计量对结果进行了定量与定性分析,该算法在植被覆盖较稀疏的地形能有效地去除背景噪声光子。然而,这类算法需根据不同的研究区域手动调整阈值,从而降低了噪声滤波算法的适用性;文献[30]提出了以聚类为核心的三级光子滤波去噪方法,借助数字高程模型实现粗去噪,采用聚类算法及置信区间实现精去噪。该算法能够有效识别平坦区域的背景噪声,保留原始数据中的有效信号光子,最小化背景噪声光子。但是,该方法未能识别混合在地物特征间的噪声光子。
综上,基于二维剖面映射的光子数据处理研究成果较为丰富,方法多样。针对推扫式光子计数激光雷达单波束数据可转换为地物剖面点云的特点,从光子密度入手,通过局部距离信息统计或密度聚类分析进行背景噪声去除。该类方法考虑了剖面光子数据在沿轨方向和高程方向光子密度差异较大,采用如椭圆搜索,密度聚类,方向滤波等方法使去噪算法更具有可靠性,提高算法效率。然而该类方法仍存在不足之处:1)去噪完成后地物表面光子仍存在小的噪声簇;2)阈值选择受地形影响自适应性较差(局部距离统计、局部密度统计);3)手动选择有效信号光子和背景噪声光子,影响去噪的精度(基于贝叶斯决策、随机森林的光子去噪算法)。
2.2 基于二维图像背景去噪
基于二维图像背景去噪核心思想是:以固定窗口下光子数目作为像素值将光子数据栅格化,之后采用图像滤波进行处理,最后将处理结果逆向提取出点云数据,具体流程如图5所示。

图5 基于二维图像背景去噪
文献[43]基于改进的Canny边缘提取的光子去噪算法,将其与基于概率分布函数的信号提取方法和局部角度映射算法进行比对,具有较好的噪声过滤能力;文献[44-45]提出基于Chan-Vese(C-V)[46]图像分割的去噪算法,采用MABEL数据进行实验。首先采用NASA初始轮廓提取算法[18],识别出目标的精确初始轮廓, 然后采用主动轮廓C-V模型对图像进行分割,对栅格影像进行整体和局部像元信息的分析迭代,使曲线能量最小化,得到潜在的信号光子。C-V模型对于分割对象与背景像素平均值明显不同的图像效果较好。
将光子数据转换成图像能够有效的使用图像滤波算法去除背景噪声,改进的Canny边缘提取通过高斯滤波器实现去噪,而C-V分割则通过局部信息迭代实现去噪,前者对于位于坐标轴两端的边缘光子可能无法实现有效的噪声滤除,而C-V水平集模型抗干扰性差,边缘不够精细。但在光栅化过程中容易出现有效信号光子丢失事件,从而降低了噪声滤波的实用性和有效性。
3 未来发展浅析
背景噪声去除是光子计数激光雷达数据处理较为重要的一步,也是目前研究热点,已有较为丰富的文献资料与研究成果。从现有文献可以看出,早期针对去噪算法的研究大多为外文资料,而国内近两年才呈现较多针对该方向的研究,且关于算法的描述大多是服务于之后的光子分类或地形提取等,专门针对去噪算法的研究较少。各类方法优缺点如表2所示:
表2 去噪方法对比
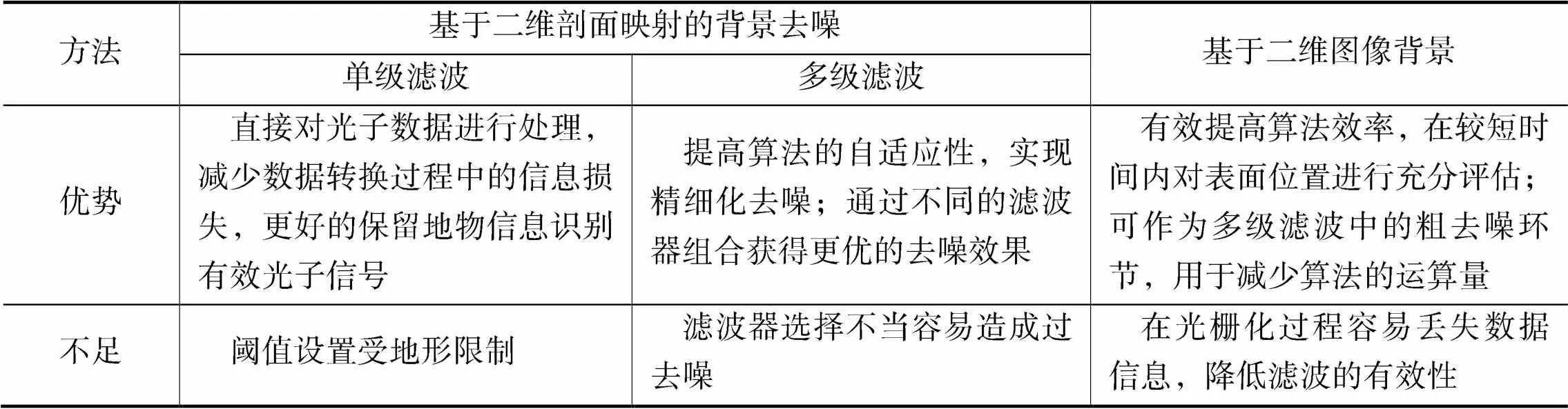
Tab.2 Comparison of denoising method
现有的方法中,无论是基于单级滤波、多级滤波或图像的去噪,大都存在去噪不彻底的现象。此外暂时并没有统一且可信度高的精度评定方法。针对各类方法的不足及目前存在的问题,未来光子去噪算法研究要考虑以下几点:
1)面向星载光子计数激光雷达数据的多级滤波。应更加注意算法在不同条件下的可行性以及结果的准确性,现有的去噪算法以单级滤波去噪为主,但其大都针对平坦地形或裸露复杂地形,而多级滤波可以通过各种滤波的组合针对各类地形进行去噪,同时在粗去噪后实现精细化去噪以达到更好的去噪效果。
2)数据特性与算法自适应性。光子密度与地形相关,当建筑物或陡峭山体的边缘、植被下的地面光子局部密度不够时,有效信号光子会被当作噪声点滤除,造成过去噪,且大多数算法需要手动调整参数,限制了算法的自适应性。在今后的研究中应注意阈值选取的自适应性,使得去噪方法更适合业务化处理。多级滤波策略采用合适的滤波联合处理,提高稀疏地面回波点的密度统计值,实现更好的去噪效果。
3)精度验证可信度。目前算法的精度评价主要包括人工判读、统计指标分析以及与NASA官网给出的结果进行对比等方式,以验证算法性能。但人工判读会因不同人员操作导致不同的精度结果,统计量分析中各统计量来源也涉及到人工判别,NASA官网给出的结果亦不能保证结果的准确性,故精度验证方法的统一与可信度也是未来研究重点之一。
4 结束语
本文从星载激光雷达工作原理、背景噪声源分析等出发,总结了现有光子去噪算法的优缺点,通过对比分析发现,大多方法针对的数据类型较为单一,地形简单。同时,不同方法对噪声滤波的分析和评价方式各不相同。针对复杂环境和地形处理需求,发展自适应较高同时兼顾多级滤波策略的去噪方法,以实现自动化、精细化的单光子去噪处理,将成为单光子去噪算法的未来发展方向。
[1] 张晨阳, 王春辉, 战蓝, 等. 星载光子探测激光雷达指向调整机构的理论分析[J]. 航天返回与遥感, 2019, 40(5): 84-94.
ZHANG Chenyang, WANG Chunhuang, ZHAN Lan, et al. Theoretical Analysis of Fast Steering Mechanism on Spaceborne Photon Detection LiDAR[J]. Spacecraft Recovery & Remote Sensing, 2019, 40(5): 84-94. (in Chinese)
[2] 侯利冰, 郭颖, 黄庚华, 等. 光子计数激光雷达时间-数字转换系统[J]. 红外与毫米波学报, 2012, 31(3): 243-247.
HOU Libing, GUO Ying, HUANG Genghua, et al. A Time-to-digital Converter Used in Photon-counting LIDAR[J]. Journal of Infrared and Millimeter Waves, 2012, 31(3): 243-247. (in Chinese)
[3] DEGNAN J J, MCGARRY J F, ZAGWODZKI T W, et al. Design and Performance of a 3D Imaging Photon-counting Microlaser Altimeter Operating from Aircraft Cruise Altitudes under Day or Night Conditions[J]. Proceedings of SPIE– The International Society for Optical Engineering, 2002, 4546(1): 1-10.
[4] 刘岩鑫, 范青, 李翔艳, 等. 超低暗计数率硅单光子探测器的实现[J]. 光学学报, 2020, 40(10): 8-13.
LIU Yanxin, FAN Qing, LI Xiangyan, et al. Realization of Silicon Single-photon Detector with Ultra-low Dark Count Rate[J]. Acta Optica Sinica, 2020, 40(10): 8-13. (in Chinese)
[5] 许艺腾. 单光子激光测高数据处理技术研究[D]. 西安: 西安科技大学, 2017.
XU Yiteng. Research on Data Processing Technology of Single Photon Laser Altimtry[D]. Xi'an: Xi'an University of Science and Technology, 2017. (in Chinese)
[6] 谢锋, 杨贵, 舒嵘, 等. 方向自适应的光子计数激光雷达滤波方法[J]. 红外与毫米波学报, 2017, 36(1): 107-113.
XIE Feng, YANG Gui, SHU Rong, et al. An Adaptive Directional Filter for Photon Counting LiDAR Point Cloud Data[J]. Journal of Infrared and Millimeter Waves, 2017, 36(1): 107-113. (in Chinese)
[7] TROUPAKI E, DENNY Z H, WU S, et al. Space Qualification of the Optical Filter Assemblies for the ICESat-2/ATLAS Instrument[C]// Proceedings of the Components and Packaging for Laser Systems, February 20, 2015. San Francisco, California, United States. San Francisco:International Society for Optics and Photonics, 2015, 9346.
[8] YU A W, KRAINAK M A, ABSHIRE J B, et al. Airborne LiDAR Simulator for the LiDAR Surface Topography (LIST) Mission[C]// 25th International Laser Radar Conference, July 5-9, 2010, St. Petersburg, Russia. Russia: 20100019566.
[9] MCGILL M, MARKUS T, SCOTT V S, et al. The Multiple Altimeter Beam Experimental LiDAR (MABEL): An Airborne Simulator for the ICESat-2 Mission[J]. Journal of Atmospheric and Oceanic Technology, 2013, 30(2): 345-352.
[10] DABNEY P, HARDING D, HUSS T E, et al. The Slope Imaging Multi-polarization Photon-counting LiDAR: an Advanced Technology Airborne Laser Altimeter [EB/OL]. [2020-10-11]. https://www.researchgate.net/publication/258331031_The_ Slope_Imaging_Multi-polarization_Photon-counting_Lidar_an_Advanced_Technology_Airborne_Laser_Altimeter.
[11] 侯利冰, 黄庚华, 况耀武, 等. 光子计数激光测距技术研究[J]. 科学技术与工程, 2013, 13(18): 5186-5190.
HOU Libing, HUANG Genghua, KUANG Yaowu, et al. Research of Photon Counting Laser Ranging Technology[J]. Science Technology and Engineering, 2013, 13(18): 5186-5190. (in Chinese)
[12] 方剑, 佘忱, 刘金鹏. 一种基于光子计数激光雷达的去噪方法[J]. 舰船电子对抗, 2019, 42(4): 10-15.
FANG Jian, SHE Chen, LIU Jinpeng. A Denoising Method Based on Photon Counting LiDAR[J]. Shipboard Electronic Countermeasure, 2019, 42(4): 10-15. (in Chinese)
[13] STILLA U,JUTZI B.Topographic Laser Ranging and Scanning: Principles and Processing[M]. Boca Raton, FL:Inc.
[14] FOUCHE D G. Detection and False-alarm Probabilities for Laser Radars that Use Geiger-mode Detectors[J]. Applied Optics, 2003, 42(27): 5388-5398.
[15] KWOK R, MARKUS T, MORISON J, et al. Profiling Sea Ice with a Multiple Altimeter Beam Experimental LiDAR (MABEL)[J]. Journal of Atmospheric and Oceanic Technology, 2014, 31(5): 1151-1168.
[16] YE Dan, XIE Huan, TONG Xiaohua, et al. The Comparison of Denoising Methods for Photon Counting Laser Altimeter Data[C]//IGARSS 2019 IEEE International Geoscience and Remote Sensing Symposium, July28-August2, 2019, Yokohama, Japan. IEEE, 2019.
[17] HUANG J P, XING Y Q, QIN L. Review of Noise Filtering Algorithm For Photon Data [EB/OL].[2020-10-11]. https://www.researchgate.net/publication/339119837_REVIEW_OF_NOISE_FILTERING_ALGORITHM_FOR_PHOTON_DATA.
[18] BRUNT K M, NEUMANN T A, WALSH K M, et al. Determination of Local Slope on the Greenland Ice Sheet Using a Multibeam Photon-counting LiDAR in Preparation for the ICESat-2 Mission[J]. IEEE Geoscience & Remote Sensing Letters, 2014, 11(5): 935-939.
[19] 夏少波, 王成, 习晓环, 等. ICESat-2机载试验点云滤波及植被高度反演[J]. 遥感学报, 2014, 18(6): 1199-1207.
XIA Shaobo, WANG Cheng, XI Xiaohuan, et al. Point Cloud Filtering and Tree Height Estimation Using Airborne Experiment Data of ICESat-2[J]. Journal of Remote Sensing, 2014, 18(6): 1199-1207. (in Chinese)
[20] 许艺腾, 李国元, 邱春霞, 等. 基于地形相关和最小二乘曲线拟合的单光子激光数据处理技术[J]. 红外与激光工程, 2019, 48(12): 148-157.
XU Yiteng, LI Guoyuan, QIU Chunxia, et al. Single Photon Laser Data Processing Technology Based on Terrain Correlation and Least Square Curve Fitting[J]. Infrared and Laser Engineering, 2019, 48(12): 148-157. (in Chinese)
[21] 李凯, 张永生, 童晓冲, 等. 单光子激光雷达数据去噪与滤波算法[J]. 导航与控制, 2020, 19(1): 67-76.
LI Kai, ZHANG Yongsheng, TONG Xiaochong, et al. Research on De-noising and Filtering Algorithm of Single Photon LiDAR Data.[J]. Navigation and Control, 2020, 19(1): 67-76. (in Chinese)
[22] 陈继溢, 唐新明, 高小明, 等. 单光子激光测高数据地形提取研究[C]//第五届激光雷达大会, 2019年5月24日-26日,厦门, 2019.
CHEN Jiyi, TANG Xinming, GAO Xiaoming, et al. Terrain Extraction from Micro-pulse Photon-counting LiDAR Data.[C]// The 5th LiDAR Conference, May 24-26, Xiamen, China, 2019. (in Chinese)
[23] ZHANG J, KEREKES J. An Adaptive Density-based Model for Extracting Surface Returns from Photon-counting Laser Altimeter Data[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 12(4): 726-730.
[24] HUANG J, XING Y, YOU H, et al. Particle Swarm Optimization-based Noise Filtering Algorithm for Photon Cloud Data in Forest Area[EB/OL].[2020-10-11]. https://www.researchgate.net/publication /332635884_Particle_Swarm_Optimization- Based_Noise_Filtering_Algorithm_for_Photon_Cloud_Data_in_Forest_Area.
[25] 黄佳鹏, 邢艳秋, 秦磊, 等. 弱光束条件下森林区域光子云去噪算法精度研究[J]. 农业机械学报, 2020, 51(4): 171-179.
HUANG Jiapeng, XING Yanqiu, QIN Lei, et al. Accuracy of Photon Cloud Noise Filtering Algorithm in Forest Area under Weak Beam Conditions[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(4): 171-179. (in Chinese)
[26] CHEN B, PANG Y, LI Z, et al. Forest Signal Detection for Photon Counting LiDAR Using Random Forest[J]. Remote Sensing Letters, 2020, 11(1): 37-46.
[27] 陈博伟, 庞勇, 李增元, 等. 基于随机森林的光子计数激光雷达点云滤波[J]. 地球信息科学学报, 2019, 21(6): 898-906.
CHEN Bowei, PANG Yong, LI Zengyuan, et al. Photoncounting LiDAR Point Cloud Data Filtering Based on Random Forest Algorithm[J]. Journal of Geo-information Science, 2019, 21(6): 898-906. (in Chinese)
[28] NIE Sheng, WANG Cheng, XI Xiaohuan, et al. Estimating the Vegetation Canopy Height Using Micro-pulse Photon-counting LiDAR Data[EB/OL]. [2020-10-11]. https://www.researchgate.net/publication/324742401_Estimating_the_ vegetation_canopy_height_using_micro-pulse_photon-counting_LiDAR_data.
[29] ZHU Xiaoxiao, NIE Sheng, WANG Cheng, et al. A Ground Elevation and Vegetation Height Retrieval Algorithm Using Micro-pulse Photon-counting Lidar Data[EB/OL]. [2020-10-11]. https://www.researchgate.net /publication/329470367_A_ Ground_Elevation_and_Vegetation_Height_Retrieval_Algorithm_Using_Micro-Pulse_Photon-Counting_Lidar_Data.
[30] POPESCU S C, ZHOU T, NELSON R, et al. Photon Counting LiDAR: An Adaptive Ground and Canopy Height Retrieval Algorithm for ICESat-2 Data[J]. Remote Sensing of Environment, 2018, 208: 154-170.
[31] MOUSSAVI M S, ABDALATI W, SCAMBOS T, et al. Applicability of an Automatic Surface Detection Approach to Micro-pulse Photon-counting Lidar Altimetry Data: Implications for Canopy Height Retrieval from Future ICESat-2 data[J]. International Journal of Remote Sensing, 2014, 35(13): 5263-5279.
[32] GWENZI D, LEFSKY M A, SUCHDEO V P, et al. Prospects of the ICESat-2 Laser Altimetry Mission for Savanna Ecosystem Structural Studies Based on Airborne Simulation Data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2016, 118: 68-82.
[33] NEUENSCHWANDER A, PITTS K. The ATL08 Land and Vegetation Product for the ICESat-2 Mission[J]. Remote Sensing of Environment, 2019, 221: 247-259.
[34] 曹彬才, 方勇, 江振治, 等. ICESat-2 ATL08去噪算法实现及精度评价[J]. 测绘通报, 2020(5): 25-30.
CAO Bincai, FANG Yong, JIANG Zhenzhi, et al. Implementation and Accuracy Evaluation of ICESat-2 ATL08 Denoising Algorithms[J]. Bulletin of Surveying and Mapping, 2020(5): 25-30. (in Chinese)
[35] WANG X, PAN Z G, GLENNIE C. A Novel Noise Filtering Model for Photon-counting Laser Altimeter Data[J]. IEEE Geoscience & Remote Sensing Letters, 2016, 13(7): 1-5.
[36] CHEN B W, PANG Y, LI Z Y, et al. Potential of Forest Parameter Estimation Using Metrics from Photon Counting LiDAR Data in Howland Research Forest [J]. Remote Sensing, 2019, 11(7): 856-876.
[37] CHEN B W, PANG Y, LI Z Y, et al. Ground and Top of Canopy Extraction from Photon-counting LiDAR Data Using Local Outlier Factor with Ellipse Searching Area[J]. IEEE Geoscience and Remote Sensing Letters, 2019, 16(9): 1447-1451.
[38] ZHANG J, KEREKES J, CSATHO B, et al. A Clustering Approach for Detection of Ground in Micropulse Photon-counting LiDAR Altimeter Data[C]//Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, July 13-18, 2014, Quebec City, Canada. IEEE, 2014.
[39] 黄佳鹏, 邢艳秋, 秦磊, 等. 弱光束条件下森林区域ICESat-2机载试验光子云去噪算法[C]//第五届激光雷达大会, 2019年5月24-26日, 厦门, 2019.
HUANG Jiapeng, XING Yanqiu, QIN Lei, et al. Forest Area Matlas photon Cloud Noise Filtering Algorithm under Weak Beam Conditions[C]//The 5th LiDAR Conference, May 24-26, Xiamen, China, 2019. (in Chinese)
[40] 李铭, 郭颖, 杨贵, 等. 一种推扫式光子计数激光雷达点云滤波算法及其验证[J]. 科学技术与工程, 2017, 17(9): 53-58.
LI Ming, GUO Ying, YANG Gui, et al. A Noise Filter Method for the Push-broom Photon Counting LiDAR and Airborne Cloud Data Verification[J]. Science Technology and Engineering, 2017, 17(9): 53-58. (in Chinese)
[41] HERZFELD U C, TRANTOW T M, HARDING D, et al. Surface-height Determination of Crevassed Glaciers—Mathematical Principles of an Autoadaptive Density-dimension Algorithm and Validation Using ICESat-2 Simulator (SIMPL) Data[J]. IEEE Transactions on Geoscience & Remote Sensing, 2017, 55(4): 1874-1896.
[42] HERZFELD U C, MCDONALD B W, WALLIN B F, et al. Algorithm for Detection of Ground and Canopy Cover in Micropulse Photon-counting LiDAR Altimeter Data in Preparation for the ICESat-2 Mission[J]. IEEE Transactions on Geoscience & Remote Sensing, 2014, 52(4): 2109-2125.
[43] MAGRUDER L A, Wharton III M E, STOUT K D, et al. Noise Filtering Techniques For Photon-counting LiDAR Data[J]. Proc. SPIE 8379, Laser Radar Technology and Applications XVII, 83790Q (14 May 2012). https://doi.org/10.1117/12.919139.
[44] CHEN Bowen, PANG Yong. A Denoising Approach for Detection of Canopy and Ground from ICESat-2's Airborne Simulator Data in Maryland, USA[C]//Proc. SPIE 9671, AOPC 2015: Advances in Laser Technology and Applications, 96711S, October 15, 2015. https://doi.org/10.1117/12.2202777.
[45] AWADALLAH M, ABBOTT L, GHANNAM S, et al. Active Contour Models for Extracting Ground and Forest Canopy Curves from Discrete Laser Altimeter Data[C]//13th International Conference on LiDAR Applications for Assessing Forest Ecosystems, October 9, 2013, Beijing, 2013: 129-136.
[46] CHAN T F, VESEL A. Active Contours without Edges[J]. IEEE Transactions on Image Processing, 2001, 10(2): 266-277. DOI:10.1109/83.902291.
Discussion on Denoising Method of Photon Counting LiDAR for Satellite Ground Observation
JIAO Huihui1XIE Junfeng*1,2LIU Ren2,3MOFan2
(1 School of Surveying and Geographical Science, Liaoning Technical University, Fuxin 123000, China)(2 Land Satellite Remote Sensing Application Center, MNR, Beijing 100048, China)(3 School of Earth Sciences and Engineering, Hohai University, Nanjing, 211100, China)
Photon counting LiDAR has many advantages, such as multi beam, low energy consumption, high repetition rate and measurement sensitivity. It has an immeasurable development potential in the new generation of space-based LiDAR. However, the weak photon signal emitted by photon counting LiDAR is easy to be confused with the background noise caused by the sun and atmosphere, which seriously affects the laser data processing and application. Based on the geometric characteristics of photon data, this paper summarizes the existing denoising methods of photon counting LiDAR from the dimensions of background denoising, two-dimensional image background denoising, single-stage filtering and multi-level filtering in 2D profile mapping, analyzes and compares the advantages and disadvantages of these methods, and points out the main development direction of the future domestic spaceborne single photon counting LiDAR altimetry data preprocessing is multi-level filtering strategy denoising.
photon-counting; background noise; de-noising method; space borne LiDAR; ground observation
P237
A
1009-8518(2021)05-0140-11
10.3969/j.issn.1009-8518.2021.05.015
焦慧慧,女,1996生,辽宁工程技术大学测绘科学与技术专业硕士研究生,研究方向为单光子激光应用。E-mail:920770527@qq.com。
谢俊峰,男,1981生,2009年获武汉大学博士学位,研究员。研究方向为卫星姿态、激光数据处理与应用。E-mail:junfeng_xie@163.com。
2020-08-28
国家自然科学基金(41571440,41771360,41971426);北京金桥工程种子基金(ZZ19013);十三五航天预研项目(D040105,D040106);重点研发计划(SQ2019YFE020224);高分测绘应用示范项目二期(42-Y30B04-9001-19/21)
焦慧慧, 谢俊峰, 刘仁, 等. 星载对地观测光子计数激光雷达去噪方法浅析[J]. 航天返回与遥感, 2021, 42(5): 140-150.
JIAO Huihui, XIE Junfeng, LIU Ren, et al. Discussion on Denoising Method of Photon Counting LiDAR for Satellite Ground Observation[J]. Spacecraft Recovery & Remote Sensing, 2021, 42(5): 140-150. (in Chinese)
(编辑:毛建杰)
猜你喜欢
农业工程学报(2022年10期)2022-08-22
舰船电子工程(2022年6期)2022-08-02
农业工程学报(2022年4期)2022-04-24
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
发明与创新·大科技(2019年11期)2019-03-07
计算机应用(2016年10期)2017-05-12
百科知识(2017年3期)2017-03-17
西安交通大学学报(2009年12期)2009-02-08
