基于贝叶斯估计的环境车辆感知
2021-11-12 03:21郝鑫
汽车实用技术 2021年20期
郝鑫
基于贝叶斯估计的环境车辆感知
郝鑫
(安徽理工大学 机械工程学院,安徽 淮南 232000)
为了改善传统背景差分法受场景变化影响较大的缺点,文章提出了一种使用贝叶斯估计对差分后的图像像素点进行是否为车辆的概率估计方法的实验。实验结果表示,抑制场景无用的像素点变化达到12.5%。基于贝叶斯估计的环境车辆感知能够明显提高车辆的检测准确度,降低误检率。
贝叶斯估计;背景差分法;车辆检测
前言
随着国家信息化,智能化的不断发展,人们对科技的依赖达到了前所未有的高度。人们的日常出行离不开交通工具,在国家不断稳步向好的发展趋势中,汽车逐渐成为了重要的交通工具。智能汽车的发展趋势是无人驾驶,同时车辆能够保证行驶安全。环境感知技术是无人驾驶的重要基础技术。车辆检测作为环境感知技术的重要组成部分,引起了科研人员的重视。
1 相关工作
针对车辆检测的特性,传统的解决方法是通过机器视觉生成一个背景,再使用实时检测的图像与背景作差生成前景图像,最后对前景图像进行一系列的处理得到车辆信息的方法。70年代末Jain等人提出了使用帧间差分的方法提取运动目标[1]。1999年Stauffer等人提出了混合高斯背景建模法[2],这种方法通过自身改变背景模型来适应各种复杂情景。2005年Wang等人提出了基于样本一致性(SACON)的背景建模方法[3]。该方法测量新像素点与背景像素点的距离,计算相近值的数目,从而判断是否为前景。2008年Maddalena等人提出了一种基于自组织神经网络的空间一致性背景减除法(SOBS)[4]。这种方法通过自组织生成神经网络来建立背景模型,利用空间一致性来更新背景阶段,最后使用前景像素点与背景像素点的距离提取目标。2010年廖博士提出了一种核密度估计法进行前景与背景的分割算法[5]。这种方法利用主成分分析(PCA)对被测视频连续进行特征分解,从而检测出前景目标。
本文提出了一种基于贝叶斯估计的环境车辆检测,此系统用于车辆在驻车时通过摄像头感知周围环境的车辆分布情况,以实现监控,安保等功能。此系统基于统计学原理的车辆检测的思路,利用背景差分法对视频中出现的车辆与背景的像素点进行分类,再使用贝叶斯估计对差分图像像素点是否为被测车辆进行概率估计,从而确定被测车辆的模型,对其进行识别。
2 图像预处理
2.1 几何变换
由于视频硬件自身的问题,使用平移、转置、缩放等几何变换的手段对图像进行改正。
2.2 OTSU算法
此方法依靠灰度特性将图片的构成分为目标和背景,两者的类间方差决定错分概率。OTSU算法需要寻找一个阈值,使得同一类加权方差最小。需要满足以下关系式:

2.3 图像平滑
高斯模糊:低通滤波的一种,也就是滤波函数是低通高斯函数。一般实现方法有离散化窗口滑窗卷积和使用傅里叶变换。
高斯模糊是将灰度图像与高斯核卷积:

其中,*为卷积,G是标准差为的二位高斯核,定义为:
2.4 形态学转换
开闭运算:开运算操作首先进行腐蚀处理再进行膨胀处理。其功能是消除突兀的像素点、平滑较大物体的边界,同时其面积不会受到明显的改变。闭运算操作首先进行膨胀处理再进行腐蚀处理。其功能是填补缺失的像素点、使距离相近且像素值相似的点连接并平滑其边界。
2.5 形态学梯度
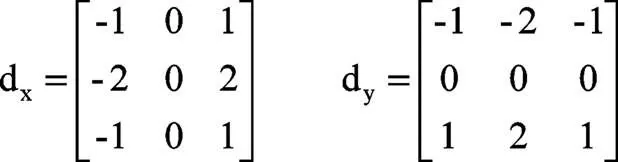
由于视频硬件自身的问题,使用平移、转置、缩放等几何变换的手段对图像进行改正。sobel算子:利用图像边缘像素的亮暗程度来检测边缘的离散微分算子。
dx为水平方向,dy表示垂直方向,其算法公式为:
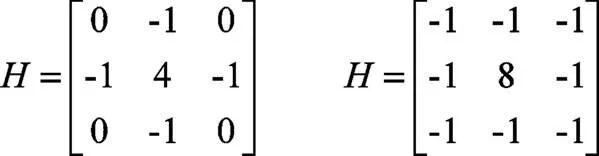
laplacian算子:利用图像中心像素值与四周像素值的差异,对邻域中心像素向四周求梯度,使得图像锐化。分为四邻域和八邻域:
3 背景差分法
选取干净且不带被测目标的背景图像,将检测视频与背景图像做差分来识别车辆,如下图1所示。
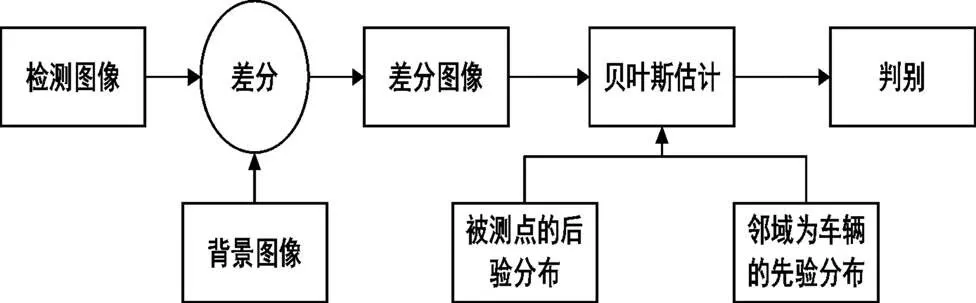
图1 算法原理
3.1 差分图像
其主要原理是利用实时帧图像跟背景帧图像相减成差来提取运动目标。Wang等人提出了基于样本一致性(SACON)的背景建模方法[3-4]。首先选择一帧图像作为背景图像,记为fn,背景图像跟实时图像中的像素的灰度值分别记为B(x,y)和fn(x,y),将二者相减做差,对差值取绝对值,记为差分图像Dn:

再设定阈值进行二值化处理,得到二值化图像Rn’。

最后对二值化图像Rn’进行连通性分析,得到检测后的图像Rn。
3.2 贝叶斯估计
Li等人使用贝叶斯方法处理面对不同的外观模型对图像中的物体进行分类[6]。场景中存在树木的叶子会随风晃动,阳光照射导致阴影的变化等情况,这些情况会导致检测出现错误,在保证背景图像实时更新的前提下,采用贝叶斯理论对每个像素变化的是被测车辆正确识别,从而提高车辆检测的正确性。
根据贝叶斯理论,将差分后的图像Rn,已判定为车辆的像素点Ic,Ic领域的像素点Ib定义为服从概率分布的变量。
被测点的后验分布:
p(x | Rn,Ic,Ib)=∫p(x,ξ | Rn,Ic,Ib)dξ (7)
后验分布化为似然性、先验分布和超先验分布三个部分的乘积:
p(x│Rn,Ic,Ib)=
∫p(Rn|x,ξ,Ic,Ib)p(x|ξ,Ic,Ib)p(ξ|Ic,Ib)dξ (8)
已判定为车辆的像素点Ic只影响似然性,Ic邻域的像素点Ib只影响先验分布,可表示为:
p(x│Rn,Ic,Ib)=p(Rn|x,Ic)p(x|Ib) (9)
根据公式得出的被测点范围大小,将其设定阈值来约束检测的是否为识别的车辆的像素点,公式为:
设置阈值的高低影响场景中树叶晃动和阴影的被错误检测的概率,阈值低时大范围的树叶晃动和阴影会被误认为是车辆,阈值高时远处的车辆会识别失败。
4 应用实验
4.1 差分图像及直方图对比
传统背景差分法如下图2、3所示:

图2 差分图像
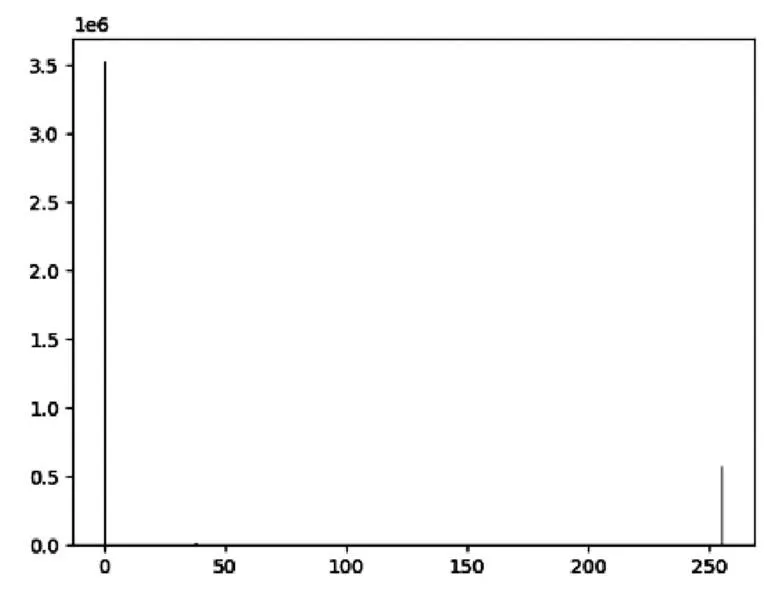
图3 差分图像的分布直方图
使用贝叶斯估计后如下图4、5所示:
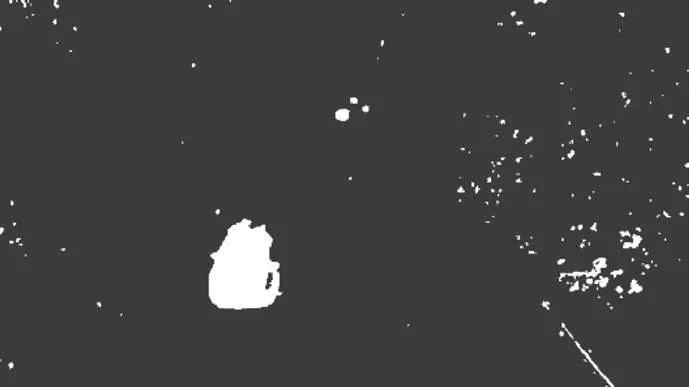
图4 使用后的差分图像
改进后对差分图像的右上部分场景干扰因素有明显抑制,树叶和阴影区域的变化减少;从直方图分布显示,黑色像素点增多,白色像素点减小,证明被检测的范围显著减小。抑制场景无用的像素点变化达到12.5 %。
图5 使用后的分布直方图
4.2 视频测试
使用针对车辆检测的程序对路况视频进行实验,实验测试如图所示:

图6 检查点1

图7 检查点2

图8 检查点3

图9 检查点4
以无车辆的图片为背景,对实验视频进行四组抽帧检测。图1中实际出现车辆4辆,识别检测车辆3辆。图2中实际出现车辆5辆,识别检测车辆4辆。图3中实际出现车辆4辆,识别检测车辆2辆。图4中实际出现车辆4辆,识别检测车辆2辆。程序算法表现结果为近距离的车辆能够准确显示,且没有检测错误的区域出现。
5 结论
正文基于贝叶斯估计的背景差分法的环境车辆检测方法,能有效检测较近距离车辆,对较远距离车辆有误差,但可以抑制和过滤场景中树木的枝叶晃动和光线的变换等干扰的无用的像素点变化达到12.5 %。
[1] Jain R, Nagel H H. On the analysis of accumulative difference pictures from image sequences of real world scenes.[J].IEEE Tran- sactions on Pattern Analysis & Machine Intelligence,1979,1(2):206- 214.
[2] Stauffer, Chris, Grimson, W.E.L. Adaptive Background Mixture Models for Real-Time Tracking[J].Proc Cvpr,1999 (2):2246.
[3] Wang H, Suter D.Background Subtraction Based on a Robust Con- sensus Method[C]//Pattern Recognition, International Conference on.IEEE Computer Society,2006:223-226.
[4] Maddalena L,Petrosino A.The SOBS algorithm:What are the limits [C]//Computer Vision and Pattern Recognition Workshops,2012 IEEE Computer Society Conference on IEEE,2012:21-26.
[5] Liao S,Zhao G,Kellokumpu V. Modeling pixel process with scale invariant local patterns for background subtraction in complex scenes[C]//Computer Vision and Pattern Recognition,2010 IEEE Conference on.IEEE,2010:1301-1306.
[6] Li,Fei-Fei,Fergus,R.,and Perona,P.A Bayesian approach to unsuper- vised one-shot learning of object categories[C]//In Proceedings of the International Conference on Computer Vision,2003.
Environmental Vehicle Perception Based on Bayesian Estimation
HAO Xin
( College of Mechanical Engineering, Anhui University of science and technology, Anhui Huainan 232000 )
In order to improve the traditional background subtraction method which is greatly affected by scene changes, this paper proposes a Bayesian estimation method to estimate whether the pixels in the difference image are vehicles. The experimental results show that the useless pixels in the scene can be suppressed by 12.5 % from the distribution histogram. Environmental vehicle perception based on Bayesian estimation can significantly improve the accuracy of vehicle detection and reduce the false detection rate.
Bayesian estimation;Background difference method;Vehicle identification
U467
B
1671-7988(2021)20-31-04
U467
B
1671-7988(2021)20-31-04
10.16638/j.cnki.1671-7988.2021.020.008
郝鑫,硕士研究生,安徽理工大学机械工程学院,研究方向为机器视觉检测。
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
现代电子技术(2018年18期)2018-09-12
软件导刊(2018年4期)2018-05-15
上海师范大学学报·自然科学版(2018年3期)2018-05-14
电脑知识与技术(2018年35期)2018-02-27
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
科教导刊·电子版(2017年32期)2018-01-09
科学家(2017年12期)2017-08-10