软体驱动器的设计制作和仿真分析*
2021-11-15 03:58吴越
科技与创新 2021年21期
吴越
(安徽工业大学机械工程学院,安徽 马鞍山 243002)
随着工业技术的不断发展,工业机械有了长足的进步,越来越多的机械装备不断投入生产使用,制造工艺、材料性能、控制技术也越来越成熟,越来越先进,我们的生产生活也离不开各式各样的机器人。但是传统的机器人通常是由常规的钢铁等材料制作,其间通过刚性关节连接,柔性不够,在安全性和适应性上越来越不能满足人们的要求。而使用能够变形的材料而非钢铁等制作的一系列新型机器人,其结构更加柔和,动作也更加顺畅。
随着研究的进一步深入,软体机器人的概念应运而生,依托于变形材料的发展、仿生学的设计、仿真分析技术的验证等,软体机器人有了很大的发展。软体机器人的最大特点就是制作材料的软性或者弹性,其可以实现任意的变形,结构连接更加柔顺,通过一根管道输入气流等其他方式,配合结构特征,就可以实现相应的运动。软体机器人由于其本身的物理特性,能够适应各种非结构化环境,人机交互更加安全,具有连续变形结构,软体机器人的柔顺型和安全性等让其有着广阔的发展应用前景。软体机器人是一个新的领域,但是它的发展确实非常迅速。软体机器人涉及材料学、生物工程学、机电控制等诸多学科,是多重学科的综合体[1-4]。
软体机器人的常规驱动方式有气动驱动、绳拉驱动、化学驱动等,其中气动驱动原理简单、污染小、效率高、可靠性高,备受研究人员的欢迎。软体机器人通常为多结构设计,即采用多驱动单元组合阵列,通过控制小单元驱动器的运动,进而控制软体机器人。故本文由气动软体机器人出发,研究单个软体驱动单元的结构、制作、变形仿真分析等,讨论软体机器人的发展。
1 结构设计
气动驱动器利用其独特的形态结构和特殊的材料特性,在受到气体压强作用时,结构发生特定的形变,材料主要以各种类型的硅胶为主。为了实现轴向变长的功能,本文气动驱动器结构如下,由于充气过程中,径向和轴向的作用面积的差异,导致驱动器不同部位的形变程度不同,产生外在的变长现象[5]。当保持气压时,驱动器保持状态,当泄压时,驱动器由于材质特性而恢复原状。软体驱动器如图1 所示,由两个单侧单元软体结构粘合而成,最大长度为77 mm,最大直径为36 mm,驱动器采用两部分分别倒模再粘合的方式制作,单侧单元软体结构如图2 所示,根据模具制作中空形式的半圆柱形软体驱动器,利用粘合剂粘合。底部开一进气孔,接入气管后封堵住气管防止漏气,在运转过程中,改变气压大小气压完成相应动作。
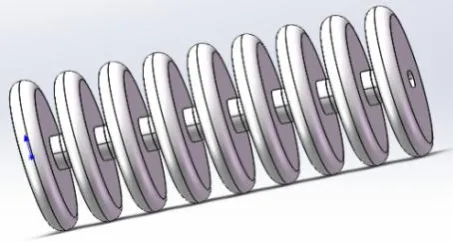
图1 软体驱动器
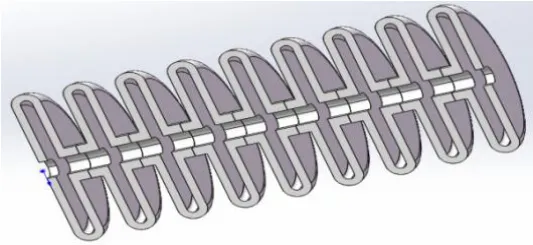
图2 单侧单元软体结构
2 软体驱动器的制作
气动软体驱动器最重要的一环就是材料的选择,硅胶的材质对结构能否实现预期的工作特性至关重要。目前广泛使用的材料之一是ECOFLEX 硅胶,其固化快、延展性高,有着极大的变形能力,力学特性优良,但是价格较高。常规的室温硫化硅橡胶价格较低,固化时不放热不膨胀,力学特性较好。软体驱动器往往结构复杂多变,制作方式异于常规零部件,通常使用3D 打印或者倒模,而3D 打印由于通常使用材料是金属、树脂等,无法制作复杂硅胶模型,所以本文驱动器采用硅胶倒模的方式制作。硅胶浇筑倒模技术成熟,即通过驱动器模型尺寸设计相应的模具形状和尺寸,将浇筑倒模原料(硅胶及固化剂等)倒入模具,一定时间后固化脱模,即可得到所需实体[6]。
2.1 混合
根据驱动器实体模型预估所需硅胶的质量,防止因为过多而导致浪费或者过少而导致二次添加产生不良影响。估算质量后,留取一定的合理余量,按照硅胶A 和硅胶B 质量比为1∶1 倒入搅拌容器,用搅拌棒搅拌至混合均匀。在此过程中,硅胶中会混合少量的气泡,为了使驱动器质地均匀,要尽量减少气泡的介入,搅拌时搅拌棒应该按照固定的方向搅拌,防止过多气泡产生进而造成不利影响。
2.2 注模
硅胶混合搅拌完成后,选择合适的模具作为主模具,如图3 所示,缓慢匀速地倒入适量的硅胶,不可注满,此时将腔室形成模具与其配合,如图4 所示,静置数小时等待固化,为了实体完全稳定,时间可适当延长。
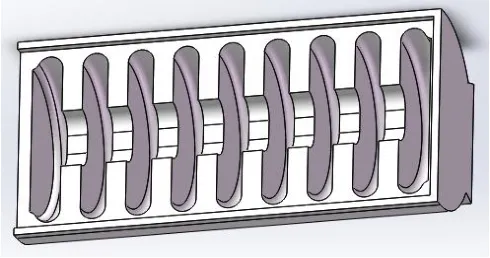
图3 主模具
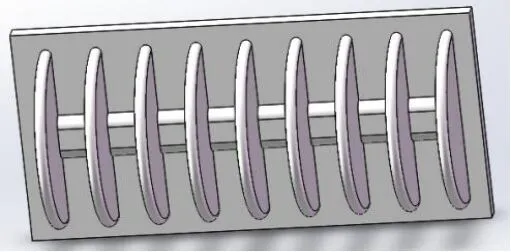
图4 腔室形成模具
2.3 脱模
拆卸模具过程应缓慢,防止黏连撕裂,先拆腔室形成模具,再取出软体驱动器。
3 有限元分析
3.1 仿真参数设置
ABAQUS 具有较全面且人性化的三维建模功能,同时具有外部导入三位模型的功能[7-10]。建立硅胶的超弹性材料和布料的属性,其中硅胶的材料常量依据文献分别选取C10=0.11,C20=0.02,其他参数均为0。定义材料属性的截面特征,赋予界面材料属性。仿真分析设置有纵向弯曲和无纵向弯曲两组。将底面的位置定义六个自由度下的全约束,内部所有空腔内表面定义压强载荷,确定压强范围。本文采用四面体网格划分,定义四面体网格类型。定义网格大小,根据尺寸大小,采用2 mm 的网格大小对网格进行划分,最终形成40 597 个四面体网格。
3.2 计算结果
图5、图6 分别表示有纵向弯曲和无纵向弯曲时,软体驱动器内部充气不同气压值下的变形情况。从结果来看,内部压强不断增大后,气囊膨胀持续增大,向底部弯曲变化愈发厉害,弯曲角度随之变大。

图5 有纵向弯曲时的软体驱动器充气变形

图6 无纵向弯曲时的软体驱动器充气变形
4 结语
通过对硅胶结构的设计以及有限元分析,得到了软体驱动器在不同气压下的变形。和刚性机器人相比,软体材料的由于其独特的材料特性,使得软体驱动器的安全性得到了很大的提升,并且软体驱动器结构简单,通过简单的气压差就可以实现复杂灵活运动,未来软体驱动器有着广阔的发展前景。
猜你喜欢
皮肤病与性病(2021年3期)2021-07-30
北华大学学报(自然科学版)(2021年3期)2021-07-13
电脑爱好者(2020年6期)2020-05-26
科学导报·科学工程与电力(2019年26期)2019-08-13
人生与伴侣·共同关注(2018年3期)2018-03-23
科技风(2017年8期)2017-10-21
中国信息化周报(2017年4期)2017-03-23
中国新闻周刊(2017年7期)2017-03-22
三联生活周刊(2017年9期)2017-03-03
知识就是力量(2017年1期)2017-01-06