基于改进BP-PID干煤粉气化炉控制系统的研究
2021-11-17 12:04唐明峰秦琳琳要艳静
计算机仿真 2021年9期
唐明峰,秦琳琳,刘 鹏,要艳静
(1.中国科学技术大学信息科学技术学院,安徽 合肥 230027;2.航天长征化学工程股份有限公司,北京 101111)
1 引言
由于我国“富煤、缺气、少油”的能源结构,煤炭成为我国最为重要的工业与民用能源。最近国家高度重视能源多样化,煤电、煤化工是战略技术,以煤为原料生产各种成品油、各种化工原料和产品[1]。为了大幅度减少煤炭造成的大气污染,洁净煤技术已经成为我国当前最为迫切的应用,煤炭气化技术是煤炭清洁化利用中最为优选的技术,而干煤粉气流床气化技术由于其特有的清洁、高效特点,代表今后煤炭气化技术的发展方向[2]。同时,随着农业的进一步发展和提高,作为氮肥和其它复合肥料的中间产品,中国合成氨产量将稳步增加。而煤气化-合成氨-化肥已经是中国主要煤化工产业,也是未来发展的方向。
对于气化炉控制算法的研究,Tan等提出了一种基于稳定器思想的部分分散控制器设计方法控制ALSTOM气化炉的煤气焓值、压力、温度以及床料质量[3]。Sun等提出了一种基于概率鲁棒性的分散PID / PI控制器参数优化方法,通过统计计算满足动态性能的概率,然后将其作为基于遗传算法优化控制器参数的目标函数,克服了基于标称条件的优化方法局限性[4]。罗伟分别采用免疫PID控制和PID控制对生物质气化炉温度和含氧量分别进行控制,起到了稳定气化炉温度、降低可燃气体含氧量的作用[5]。吕大非采用串级PID控制方法对生物质气化炉温度进行控制,提高了生物质产品的质量和数量[6]。
由于气化炉是非线性系统,现有的气化炉控制方法主要采用PID控制,但是PID参数不易整定[7]。BP神经网络属于前馈型人工神经网络,具有逼近任意连续有界非线性函数的能力[8]。
本文提出了一种基于改进BP-PID控制算法,并将其应用于气化炉的氧煤比控制系统,控制系统具有更高的跟踪精度、更强的适应性和更好的鲁棒性。
2 干煤粉气化技术原理以及模型建立
干煤粉气流床气化技术是指利用射流卷吸的原理,利用喷嘴,把含水量低于6%的干煤粉和氧气、水蒸气等氧化剂快速喷至气化炉中,气化炉内特殊设计的流场能够让煤粉和氧化剂充分混合,确保气化反应能够正常进行[5]。
煤是由多种有机高分子化合物和矿物质组成的复杂混合物,一般认为,煤在气化炉内气化要经历干燥、挥发分析出和焦碳气化三个过程。煤在气化炉中首先进行的是脱挥发份的热裂解反应,由于气化炉内温度很高,焦油和气相烃很少,裂解反应可以下式表示
Coal→C+CH4+H2+CO+CO2+H2O
(1)
在气流床气化炉内,温度是气流床安全运行的重要指标,反映了煤的氧化程度。炉内温度一般通过测量合成气中甲烷含量间接获得。在氧气煤比比较低的时候,由于反应温度较低,碳转化率比较低,煤在气化过程中主要发生热解反应。此时,煤气主要来自煤中的挥发分,CH4的含量比较高。随着氧气煤比的增加,反应温度升高,CH4分解反应速度提高,CH4含量降低。因此,氧煤比的控制是气化炉控制中非常重要的环节,气化炉主回路的被控过程可简化来用单输入单输出的模型描述,将系统的输出气体CH4作为输出变量,而氧煤比作为控制变量。
氧煤比系统总体框图如图1所示,氧气流量由气化炉负荷决定,合成气成分控制器根据测量的合成气成分决定氧煤比,再与氧气流量相乘,然后得到粉煤流量的设定值。实现氧煤比的优化自动控制,从而保证气化炉安全可靠运行,促进气化炉在大规模应用和推广。
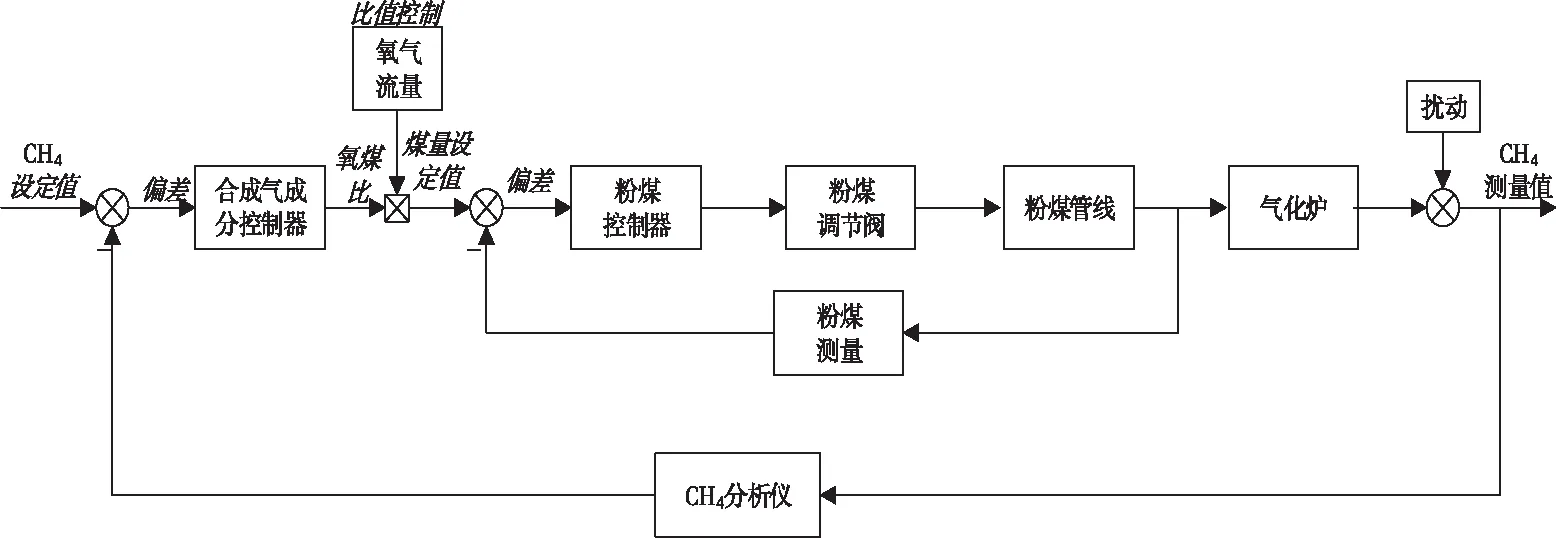
图1 总体控制回路框图
由于气流床燃烧的复杂性,涉及到许多复杂的化学反应过程,气化炉是一个复杂的多变量、大滞后、非线性及强耦合的系统,难以采用纯机理建模,因此本文采用辨识建模和机理建模相结合的方法,利用现场运行数据作为实验数据,根据统计学原理,只要样本数据量足够大,也可以建立起接近准确的数学模型。由于系统在绝大部分时间工作在稳定状态,而系统在稳定状态下的数据变化量很小,故采用受控自回归积分滑动平均(Controlled Auto-Regressive Integral Moving-Average, CARIMA)模型进行系统辨识。CARIMA模型如下所示

(2)

辨识算法采用渐消记忆递推增广最小二乘法,能够减少计算量。

(3)

(4)

(5)
其中

3 BP神经网络PID控制器
3.1 传统PID控制系统
在工业控制中,PID的运用非常广泛,结构简单,稳定性强。PID控制是一种线性控制算法,它通过调整比例(P)、积分(I)、微分(D)三种参数,使参数形成既相互配合又相互制约的控制关系,能获得较好的控制效果。但是,当PID控制对象在外界环境的变化下改变时,PID控制器的三个控制参数很难自动调整以适应,特别是对于一些参数变化慢和一些复杂过程。而BP神经网络具有拟合任意非线性函数的能力,利用BP神经网络可以建立参数自学习PID控制器,从而通过对PID系统性能的学习来改进具有最佳参数组合的PID控制。这样,在一定程度上解决了PID控制参数难以确定和环境扰动的不确定性等难题,以及PID控制器不易在线实时参数整定的弊端,从而充分发挥PID控制的优点。
离散PID控制器输出增量为
Δu(k)=u(k)-u(k-1)=Kp(e(k)-e(k-1))+
Kie(k)+Kd(e(k)-2e(k-1)+e(k-2))
(6)
其中u是控制量,e是控制误差,Kp、Ki、Kd分别为PID参数。
3.2 BP网络结构
BP神经网络具有两个特点:一是网络为全连接的,即在任意一层上的神经元与它之前的所有神经元都相连,二是网络至少具有一个隐含层。在BP神经网络中,存在两种信号:函数信号和误差信号,这两种信号分别体现在正向和反向传播过程中。
基于BP的PID是一种改进型PID控制方法,是对传统的PID控制的一种改进和优化。BP神经网络由三层网络(输入层、隐含层、输出层)组成,BP网络中的输出层神经元状态对应PID控制器的三个可调参数Kp、Ki、Kd。当外界环境发生变化时,BP神经网络可以通过自学习和调整加权系数等功能,使某种最优控制的PID控制的三个参数对应于BP神经网络的输出。根据PID的三个参数,设计4个输入层、4个隐含层、3个输出层的三层BP神经网络结构,如图2所示。
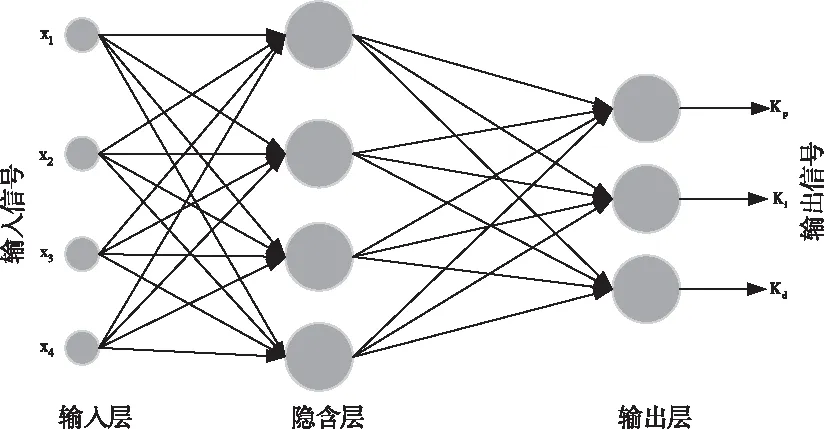
图2 BP神经网络结构图
基于BP神经网络的PID控制器由BP神经网络和常规的PID控制器两部分组成,如图3所示。PID控制器负责控制信号的正向传导,对被控对象进行闭环控制,BP神经网络则根据误差和运行状态,以误差梯度下降的方式修改BP神经网络的各层权值和阈值,调节网络输出层对应的PID的三个参数Kp、Ki、Kd,使之实现在线调整控制参数,从而达到通过PID控制器参数的自适应调整来优化系统性能的目的。
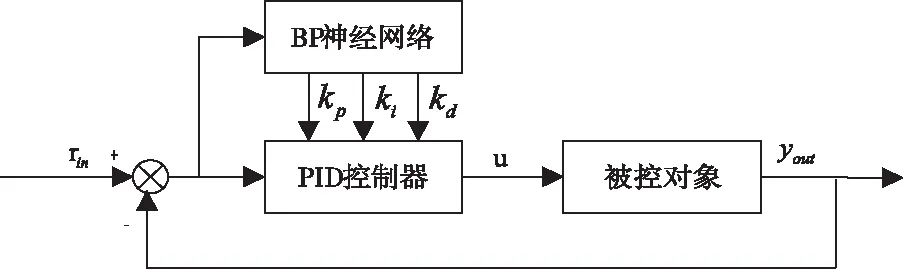
图3 BP-PID控制器结构
3.3 改进BP-PID算法
1)BP学习算法改进
由于BP神经网络收敛速度慢,难以满足具有适应功能的实时控制的要求,因此对此进行改进[6]。
①引入动量项。为使收敛速度更快,在加权系数修正公式中增加一个动量项α。

(7)
其中w是权值,ε是代价函数,η是学习率。
②变步长法。在BP学习算法中,学习率参数η不易选择,选择太小,收敛太慢,选择太大,容易引起振荡甚至发散。为解决这个问题,采用变步长方法。

(8)
其中η(n)=2λη(n-1),λ=sgn[ε(n-1)ε(n)]
2)正向传播过程
网络输入层节点的输入输出为

(9)

隐含层的诱导局部域和输出分别为

(10)

(11)
隐含神经元的激活函数取双曲正切函数

(12)
输出层的诱导局部域和输出分别为
(13)

(14)
输出层的激活函数取非负的sigmoid函数
(15)
3)反向传播过程
网络的输出性能指标函数为
(16)
输出层权值调整修正公式为

(17)

隐含层权值调整修正公式为

(18)
BP-PID控制器算法过程如下
a) 确定输入层、隐含层和输出层的神经元个数,并给出各层网络权值的初值;
b) 通过采样得到输入输出值,计算误差;
c) 计算神经网络各层神经元输入和输出,即正向传播过程;
d) 计算控制器输出;
e) 进行神经网络的学习,在线调整权值,实现PID控制参数的自适应调整,即反向传播过程;
f) 开始下一次学习,从步骤b)开始重复执行,直到学习完毕。
4 仿真结果

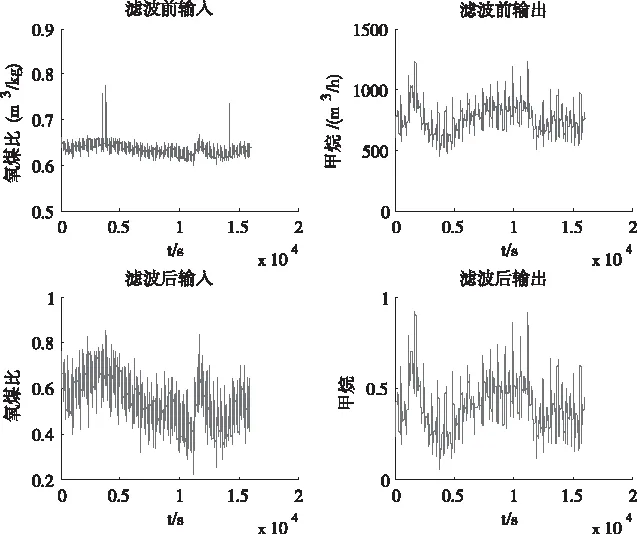
图4 滤波前后输入输出曲线
基于BP神经网络整定的PID控制器,为了更快的收敛,选取学习率η为0.3,惯性系数α为0.05,权系数初始值选取为[-0.5 0.5]之间的随机数。

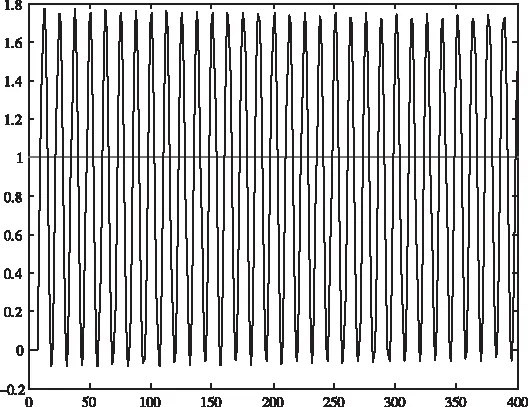
图5 系统临界振荡曲线
常规PID控制器和基于改进BP神经网络PID控制器的仿真曲线分别如图6所示。可以看出,常规PID控制器超调量为24.7%,调节时间为40s,基于BP神经网络超调量为3.1%,调节时间为53s,因此BP-PID控制比常规PID控制器超调量较小,调节时间长,因此整个过渡过程也比较平稳,控制效果更佳。图7则是BP-PID控制的PID参数曲线。
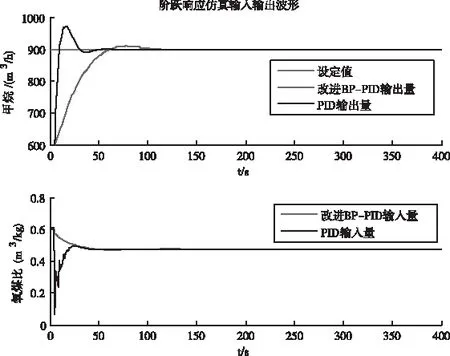
图6 改进BP-PID控制和PID控制仿真曲线

图7 BP-PID控制PID参数曲线
为了测试系统的稳定性,在200-230s加入2%的阶跃值的直流扰动,结果如图8所示,BP-PID控制输出最高超调为15%,加入扰动到恢复稳态时间间隔为70s,可以看出改进BP-PID控制算法具有很好的鲁棒性和抗干扰性。

图8 加入直流扰动后BP-PID控制仿真曲线
5 结论
气化炉是干煤粉气流床气化技术的一种重要设备,对气化炉氧煤比回路的建模与控制研究具有实际应用价值。本文根据氧煤比和甲烷作为输入输出数据,经过滤波处理后,采用渐消记忆递推增广最小二乘辨识算法建立系统模型,通过BP神经网络的自学习能力可以找到某一最优控制下的PID控制器参数,即运用改进的BP-PID算法对炉内温度进行控制。仿真结果表明,BP-PID控制算法比普通PID算法具有更好的控制效果,并且具有很好的抗干扰性以及鲁棒性,更适用于气化炉这样复杂的系统。
猜你喜欢
煤炭科学技术(2022年8期)2022-10-07
煤化工(2022年3期)2022-07-08
冶金能源(2022年2期)2022-03-29
煤田地质与勘探(2022年2期)2022-03-18
煤气与热力(2022年2期)2022-03-09
中国测试(2018年9期)2018-05-14
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
科学种养(2009年3期)2009-04-23
现代营销·信息版(2006年10期)2006-10-06